TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080082
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023193090
出願日
2023-11-13
発明の名称
制御装置、制御方法、プログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
23/695 20230101AFI20250516BHJP(電気通信技術)
要約
【課題】 本発明によれば、ハンチングの発生を抑制した自動追尾撮影が可能になる。
【解決手段】 追尾対象の被写体を、撮像装置が撮像する撮像画像における目標位置に留めるように撮像方向を制御するための処理を実行する制御装置であって、撮像画像における被写体の位置を検出する検出手段と、撮像装置から画角に関する情報を取得する取得手段と、被写体の速度を算出する算出手段と、被写体の位置と目標位置のパンまたはチルト方向の少なくとも1つとの相対角度を算出する相対角度算出手段と、被写体の速度と撮像画像におけるパンまたはチルト方向の少なくとも1つの駆動速度との相対角速度を算出する角速度算出手段と、相対角度と相対角速度に基づいて撮像装置の撮像方向を制御するための処理を実行する制御手段とを有する制御装置。
【選択図】 図1
特許請求の範囲
【請求項1】
追尾対象の被写体を、撮像装置が撮像する撮像画像における目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、
前記撮像装置から取得した複数の撮像画像から各撮像画像における前記被写体の位置を検出する検出手段と、
前記撮像装置から画角に関する情報を取得する取得手段と、
前記複数の撮像画像における前記被写体の位置から前記被写体の速度を算出する算出手段と、
前記撮像画像における前記被写体の位置と前記目標位置に基づいて、前記被写体の位置と前記目標位置のパンまたはチルト方向の少なくとも1つとの相対角度を算出する相対角度算出手段と、
前記画角に関する情報と前記被写体の速度から、前記被写体の速度と前記撮像画像におけるパンまたはチルト方向の少なくとも1つの駆動速度との相対角速度を算出する角速度算出手段と、
前記相対角度と前記相対角速度に基づいて前記撮像装置の撮像方向を制御するための処理を実行する制御手段と、
を有することを特徴とする制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御手段は、前記相対角度と第1の制御係数に基づいて算出した制御角度と、前記相対角速度に第2の制御係数に基づいて算出した制御角速度とに応じて、前記撮像装置の撮像方向を制御するための処理を実行することを特徴とした請求項1に記載の制御装置。
【請求項3】
前記被写体の位置が、所定の範囲で予め設定される前記目標位置の範囲内にあるか判定する判定手段をさらに有することを特徴とした請求項2に記載の制御装置。
【請求項4】
前記判定手段が前記被写体の位置が前記目標位置の範囲内にないと判定した場合、前記第1の制御係数の値を大きくすることを特徴とした請求項3に記載の制御装置。
【請求項5】
前記判定手段が前記被写体の位置が前記目標位置の範囲内にあると判定した場合、且つ、前記相対角速度が所定の値より大きい場合、前記第2の制御係数の値を大きくし、
前記判定手段が前記被写体の位置が前記目標位置の範囲内にあると判定した場合、且つ、前記相対角速度が所定の値より小さい場合、前記第1の制御係数の値を大きくすることを特徴とした請求項4に記載の制御装置。
【請求項6】
追尾対象の被写体を、撮像装置が撮像する撮像画像における目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、
前記撮像装置から取得した複数の撮像画像から各撮像画像における前記被写体の位置を検出する検出工程と、
前記撮像装置から画角に関する情報を取得する取得工程と、
前記複数の撮像画像における前記被写体の位置から前記被写体の速度を算出する算出工程と、
前記撮像画像における前記被写体の位置と前記目標位置に基づいて、前記被写体の位置と前記目標位置のパンまたはチルト方向の少なくとも1つとの相対角度を算出する相対角度算出工程と、
前記画角に関する情報と前記被写体の速度から、前記被写体の速度と前記撮像画像におけるパンまたはチルト方向の少なくとも1つの駆動速度との相対角速度を算出する角速度算出工程と、
前記相対角度と前記相対角速度に基づいて前記撮像装置の撮像方向を制御するための処理を実行する制御工程と、
を有することを特徴とする制御装置の制御方法。
【請求項7】
請求項6に記載の制御方法をコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、追尾技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、撮像装置が撮像した画像から物体を検出し、検出結果に基づいて被写体を撮像画角内に留めるように撮像装置の撮像方向を制御する技術がある。このような技術を映像制作に用いる場合、自動で被写体の追尾撮影をおこなうことが重要である。
【0003】
特許文献1では、被写体の速度から移動位置を推定し、被写体をユーザの指定した目標位置に留めるようパン・チルト制御(以下、PT制御と称す)を行う方法について記載されている。
【先行技術文献】
【特許文献】
【0004】
特許3440916号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、撮像画像における被写体の位置と目標位置を一致するように雲台のPT制御を行なうと、雲台制御してから実動作が完了するまでのレイテンシの影響で、PT制御の過渡応答が発生しハンチングが生じる。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本実施形態における制御装置は、追尾対象の被写体を、撮像装置が撮像する撮像画像における目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、前記撮像装置から取得した複数の撮像画像から各撮像画像における前記被写体の位置を検出する検出手段と、前記撮像装置から画角に関する情報を取得する取得手段と、前記複数の撮像画像における前記被写体の位置から前記被写体の速度を算出する算出手段と、前記撮像画像における前記被写体の位置と前記目標位置に基づいて、前記被写体の位置と前記目標位置のパンまたはチルト方向の少なくとも1つとの相対角度を算出する相対角度算出手段と、前記画角に関する情報と前記被写体の速度から、前記被写体の速度と前記撮像画像におけるパンまたはチルト方向の少なくとも1つの駆動速度との相対角速度を算出する角速度算出手段と、前記相対角度と前記相対角速度に基づいて前記撮像装置の撮像方向を制御するための処理を実行する制御手段とを有する。
【発明の効果】
【0007】
本発明によれば、ハンチングの発生を抑制した自動追尾撮影が可能になる。
【図面の簡単な説明】
【0008】
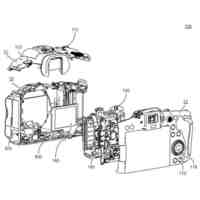
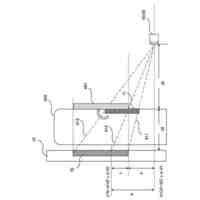
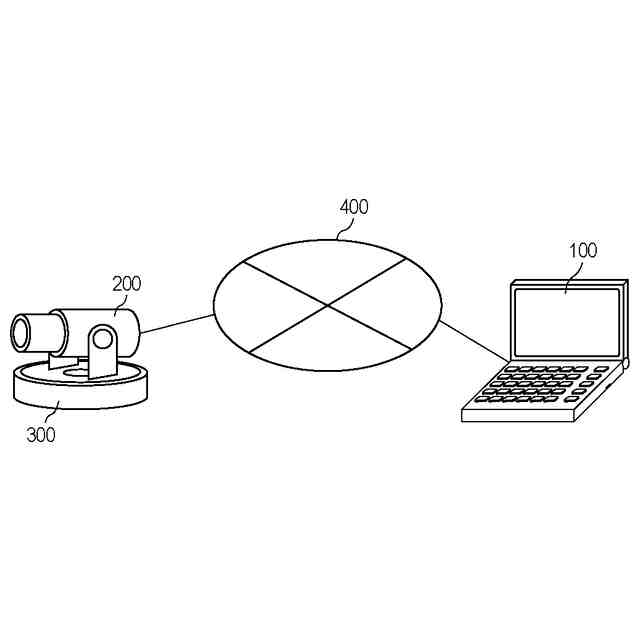
第1の実施形態に係る自動追尾システムの構成図
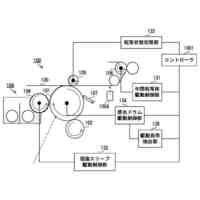
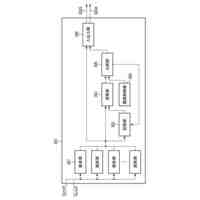
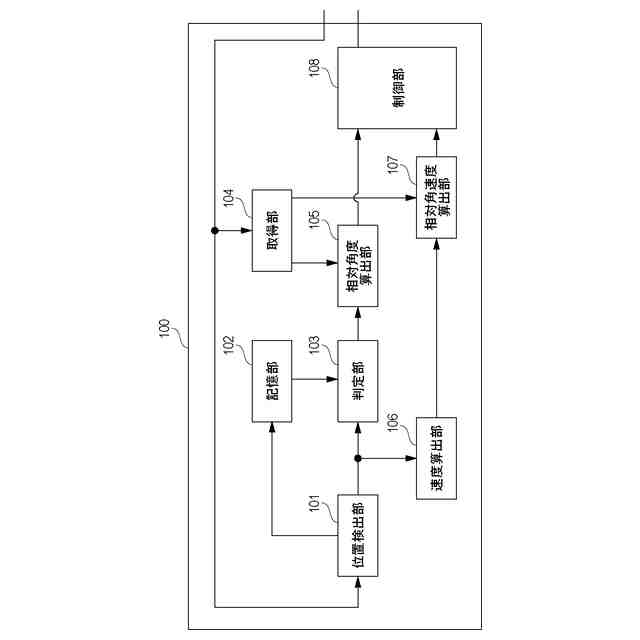
第1の実施形態に係るコントローラの機能構成例を示すブロック図
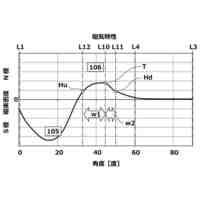
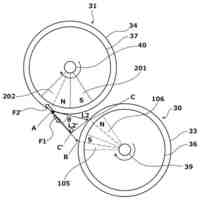
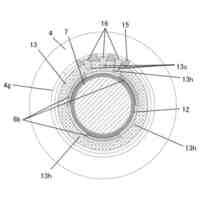
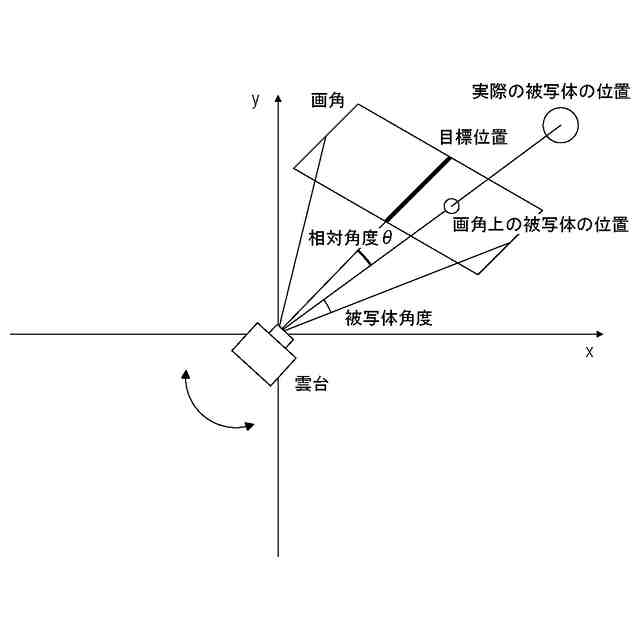
第1の実施形態に係る相対角度を説明する図
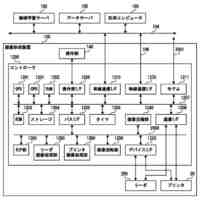
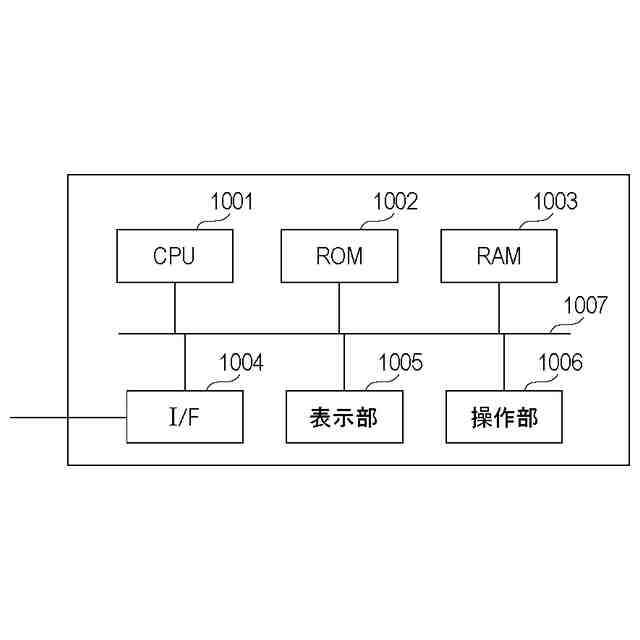
第1の実施形態に係るコントローラのハードウェア構成図
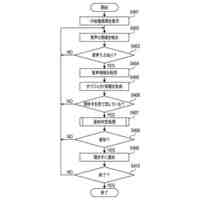
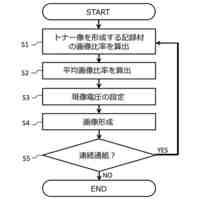
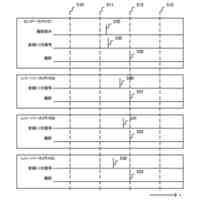
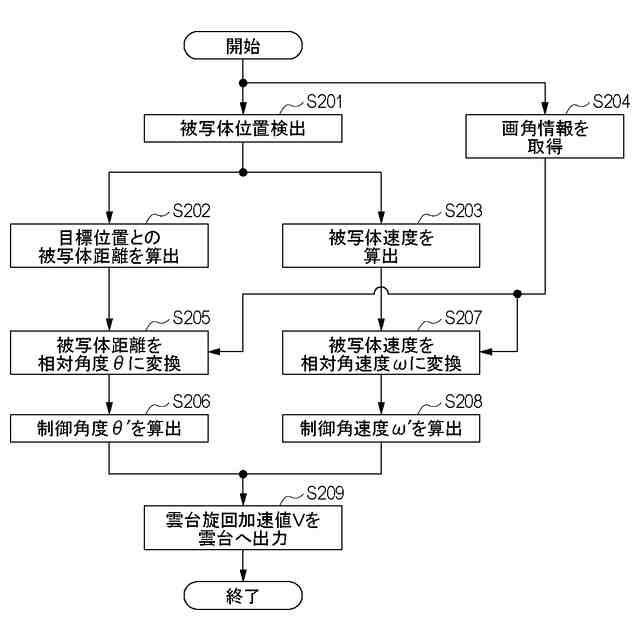
第1の実施形態に係る自動追尾システムの追尾制御のフローチャート
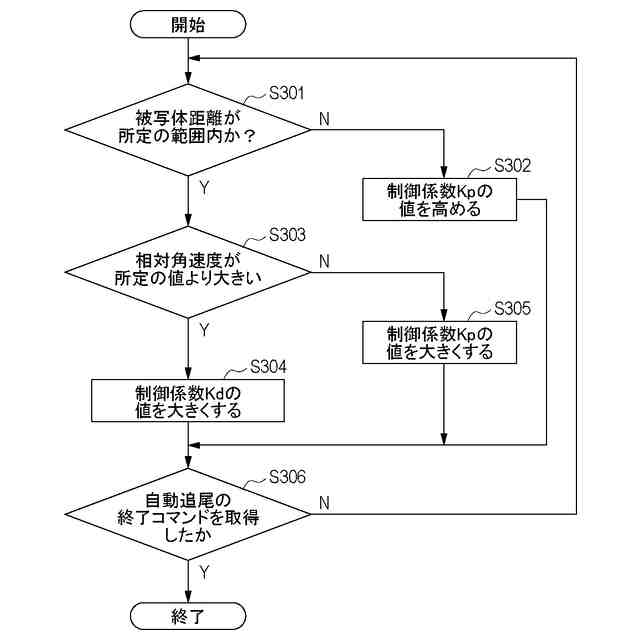
第2の実施形態に係る自動追尾システムの追尾制御のフローチャート
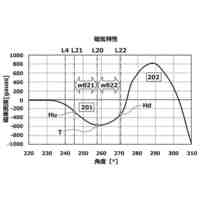
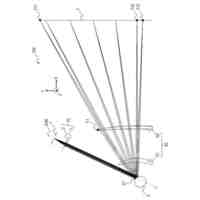
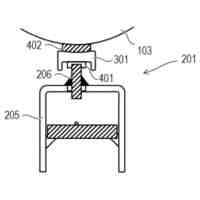
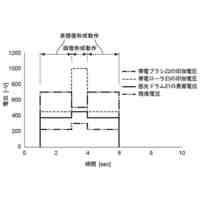
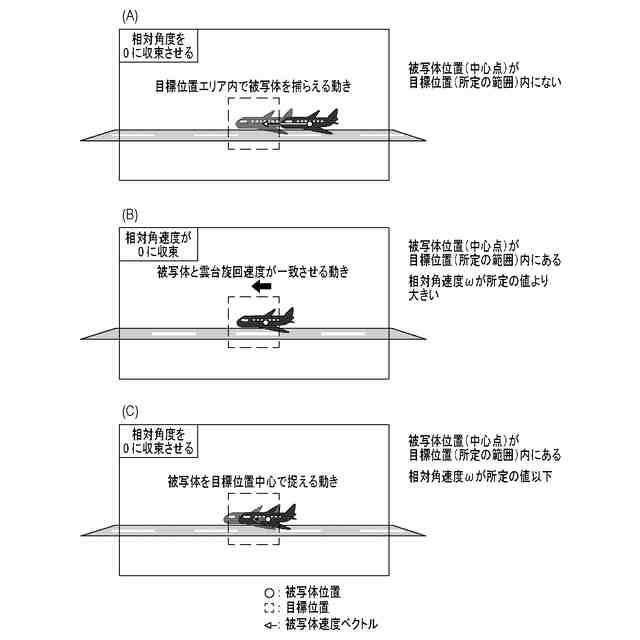
第2の実施形態における雲台ならびにカメラの動作イメージ
【発明を実施するための形態】
【0009】
(第1の実施形態)
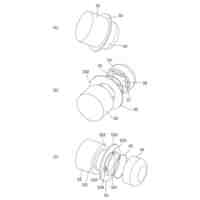
図1は第1の実施形態の自動追尾システムの構成図である。本実施形態における自動追尾システムは、コントローラ100、撮像装置200、雲台300ならびにLAN400を有する。それぞれの装置間における接続の方法については特定の方法に限らない。例えば、有線ケーブルによって接続していてもよい。本撮像システムでは、水平ならびに垂直方向に駆動する駆動部を有する雲台300にカメラ200を接続することでカメラ200の撮像方向を変更することができる。さらに、雲台300の駆動部へ制御指示をコントローラ100から行うことで、遠隔からカメラ200の撮像方向の変更を行うことが可能になる。また、コントローラ100はカメラ200が撮像した撮像画像から被写体を検出し、撮像画像における予め設定された位置に被写体を留めるように雲台300へ制御指示を送信することで被写体を自動追尾することが可能になる。
【0010】
次に図2を用いてコントローラ100の機能構成例を説明する。コントローラ100は、位置検出部101、記憶部102、判定部103、取得部104、相対角度算出部105、速度算出部106、相対角速度算出部107、制御部108で構成され、雲台300を制御する。本実施形態を実現する要部は位置検出部101、判定部103、取得部104、相対角度算出部105、相対角速度算出部107、制御部108であり、後述の図4のCPU1001によって実行される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
電子機器
14日前
キヤノン株式会社
通信装置
9日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
清掃装置
8日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
光走査装置
2日前
キヤノン株式会社
情報処理装置
10日前
キヤノン株式会社
撮像システム
3日前
キヤノン株式会社
情報処理装置
21日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像処理装置
10日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
情報処理装置
21日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
静電捕集装置
8日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
液体吐出装置
10日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
光電変換装置
14日前
キヤノン株式会社
撮影システム
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ