TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031159
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023137189
出願日
2023-08-25
発明の名称
応力解析システム
出願人
富士電機株式会社
代理人
弁理士法人旺知国際特許事務所
主分類
G01N
29/07 20060101AFI20250228BHJP(測定;試験)
要約
【課題】試験体の応力状態を短時間で特定する。
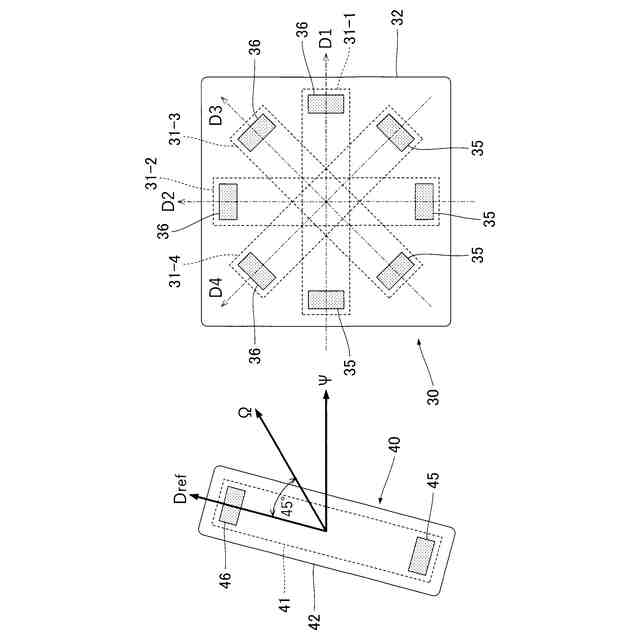
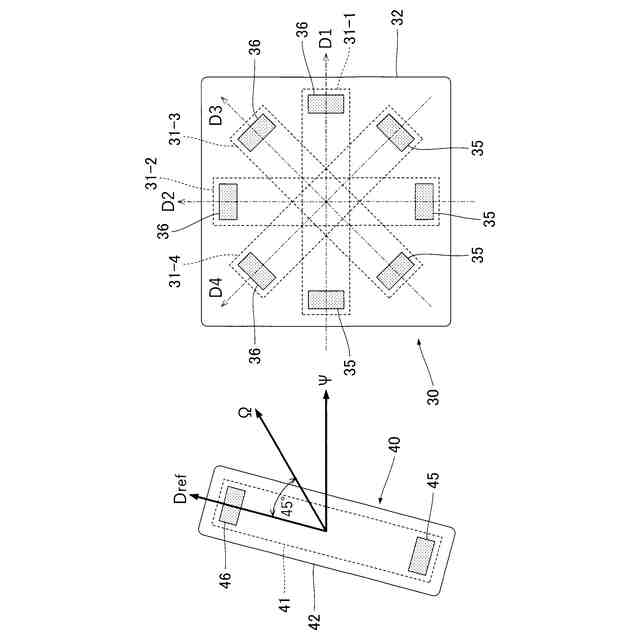
【解決手段】測定センサ30は、試験体の圧延方向Ψに沿う測定方向D1と測定方向D1に直交する測定方向D2との各々に試験体を伝搬した表面SH波を受信する。補助センサ40は、試験体の主応力方向Ωに対して所定の角度で交差する基準方向Drefに試験体を伝搬した表面SH波を受信する。情報処理装置は、表面SH波が測定方向D1に伝搬する速度に関する第1速度指標を、表面SH波が基準方向Drefに伝搬する速度に関する第1参照指標と基準値の差分に応じて補正し、表面SH波が測定方向D2に伝搬する速度に関する第2速度指標を、表面SH波が基準方向Drefに伝搬する速度に関する第2参照指標と基準値との差分に応じて当該伝搬速度を補正し、補正後の第1速度指標と補正後の第2速度指標とに応じて試験体の主応力差を特定する。
【選択図】図2
特許請求の範囲
【請求項1】
試験体の主応力方向に対して所定の角度で交差する基準方向に伝搬する表面SH波の速度に関する基準値を記憶する記憶部と、
前記試験体の圧延方向に沿う第1方向と前記第1方向に直交する第2方向との各々に前記試験体を伝搬した表面SH波を受信する測定センサと、
前記基準方向に前記試験体を伝搬した表面SH波を受信する補助センサと、
演算部と補正部と解析部とを含む情報処理部とを具備し、
前記演算部は、
表面SH波が前記第1方向に伝搬する速度に関する第1速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第1参照指標を前記補助センサの受信結果に応じて算定する第1測定処理と、
表面SH波が前記第2方向に伝搬する速度に関する第2速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第2参照指標を前記補助センサの受信結果に応じて算定する第2測定処理とを実行し、
前記補正部は、
前記第1参照指標と前記基準値との差分に応じて前記第1速度指標を補正する第1補正処理と、
前記第2参照指標と前記基準値との差分に応じて前記第2速度指標を補正する第2補正処理とを実行し、
前記解析部は、前記第1補正処理による補正後の第1速度指標と前記第2補正処理による補正後の第2速度指標とに応じて、前記試験体の主応力差を特定する解析処理を実行する
応力解析システム。
続きを表示(約 820 文字)
【請求項2】
前記測定センサは、さらに、前記第1方向に対して傾斜する第3方向と前記第3方向に直交する第4方向との各々に前記試験体を伝搬した表面SH波を受信し、
前記主応力方向が前記第3方向または前記第4方向に一致しない場合に、前記演算部による前記第1測定処理および前記第2測定処理と、前記補正部による前記第1補正処理および前記第2補正処理と、前記解析部による前記解析処理とが実行され、
前記主応力方向が前記第3方向または前記第4方向に一致する場合に、
前記演算部は、
表面SH波が前記第3方向に伝搬する速度に関する第3速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第3参照指標を前記補助センサの受信結果に応じて算定する第3測定処理と、
表面SH波が前記第4方向に伝搬する速度に関する第4速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第4参照指標を前記補助センサの受信結果に応じて算定する第4測定処理とを実行し、
前記補正部は、
前記第3参照指標と前記基準値との差分に応じて前記第3速度指標を補正する第3補正処理と、
前記第4参照指標と前記基準値との差分に応じて前記第4速度指標を補正する第4補正処理とを実行し、
前記解析部は、前記第3補正処理による補正後の第3速度指標と前記第4補正処理による補正後の第4速度指標とに応じて、前記試験体の主応力差を特定する解析処理を実行する
請求項1の応力解析システム。
【請求項3】
前記基準値は、前記補助センサの受信結果に応じて算定される
請求項1の応力解析システム。
【請求項4】
前記所定の角度は、45°である
請求項1から請求項3の何れかの応力解析システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、解析対象の物体(以下「試験体」という)について応力状態を特定する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物体表面に対して平行に振動する表面SH(Shear horizontal)波を利用して試験体の応力状態を特定する技術が従来から提案されている。例えば、特許文献1には、表面SH波を試験体の表面に放射する送信子と、試験体を伝搬した表面SH波を受信する受信子とを含む音弾性応力測定用センサが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-37436号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術のもとで試験体における主応力方向を特定するためには、試験体に対する表面SH波の伝搬方向を相違させた複数の場合の各々について伝搬速度を測定する必要がある。したがって、試験体の応力状態を特定するために長時間が必要である。以上の事情を考慮して、本開示のひとつの態様は、試験体の応力状態を簡便に特定することを目的とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、本開示のひとつの態様に係る応力解析システムは、試験体の主応力方向に対して所定の角度で交差する基準方向に伝搬する表面SH波の速度に関する基準値を記憶する記憶部と、前記試験体の圧延方向に沿う第1方向と前記第1方向に直交する第2方向との各々に前記試験体を伝搬した表面SH波を受信する測定センサと、前記基準方向に前記試験体を伝搬した表面SH波を受信する補助センサと、演算部と補正部と解析部とを含む情報処理部とを具備し、前記演算部は、表面SH波が前記第1方向に伝搬する速度に関する第1速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第1参照指標を前記補助センサの受信結果に応じて算定する第1測定処理と、表面SH波が前記第2方向に伝搬する速度に関する第2速度指標を前記測定センサの受信結果に応じて算定し、表面SH波が前記基準方向に伝搬する速度に関する第2参照指標を前記補助センサの受信結果に応じて算定する第2測定処理とを実行し、前記補正部は、前記第1参照指標と前記基準値との差分に応じて前記第1速度指標を補正する第1補正処理と、前記第2参照指標と前記基準値との差分に応じて前記第2速度指標を補正する第2補正処理とを実行し、前記解析部は、前記第1補正処理による補正後の第1速度指標と前記第2補正処理による補正後の第2速度指標とに応じて、前記試験体の主応力差を特定する解析処理を実行する。
【図面の簡単な説明】
【0006】
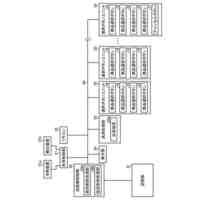
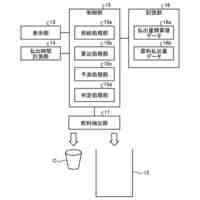
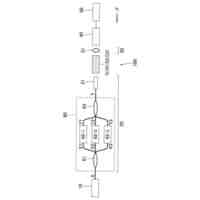
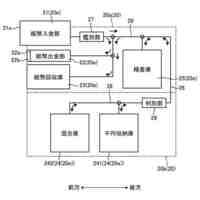
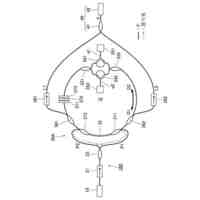
本開示のひとつの形態における応力解析システムの構成を例示するブロック図である。
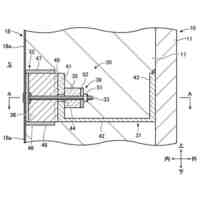
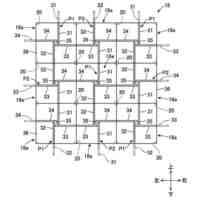
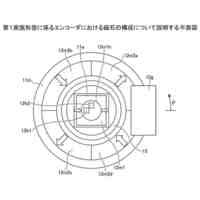
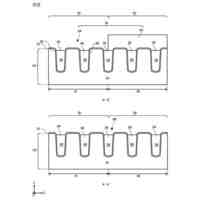
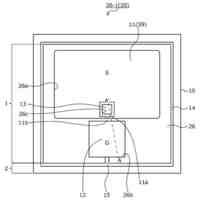
測定センサおよび補助センサの平面図である。
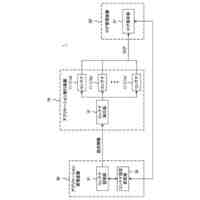
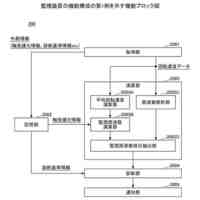
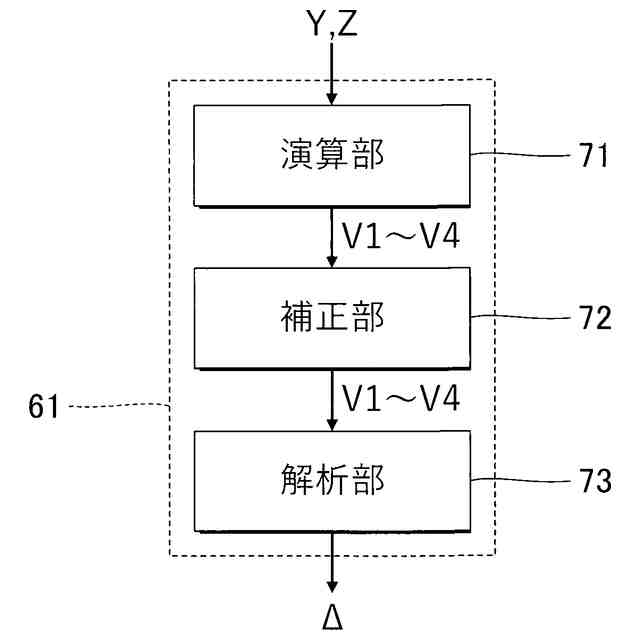
応力解析システムの機能的な構成を例示するブロック図である。
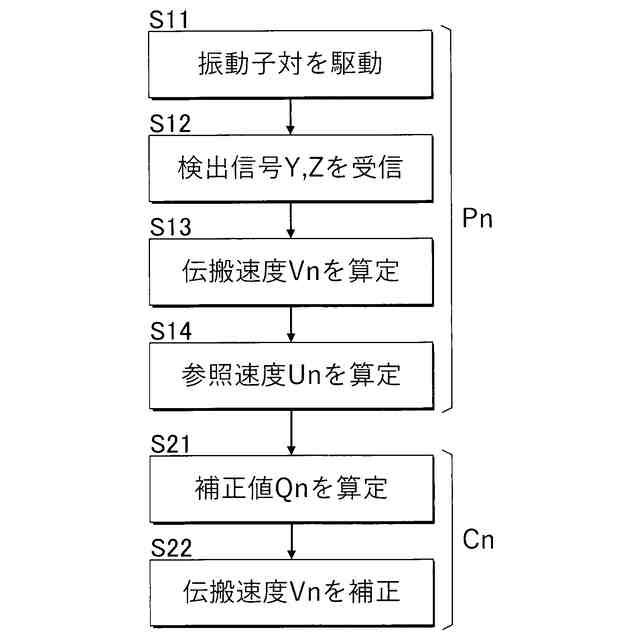
測定処理および補正処理のフローチャートである。
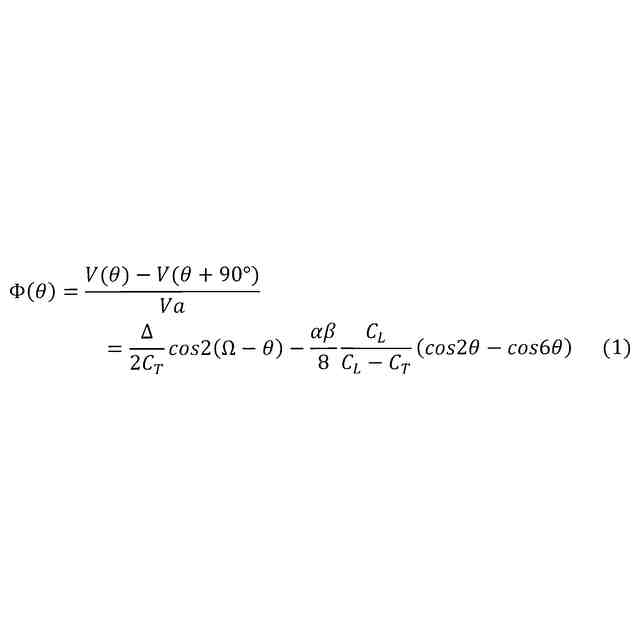
表面SH波の伝搬方向と表面SH波の伝搬速度との関係を表すグラフである。
応力解析処理のフローチャートである。
応力解析処理のフローチャートである。
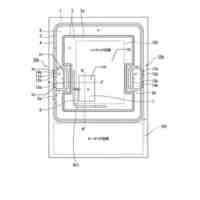
変形例における測定センサの平面図である。
変形例における測定センサの平面図である。
【発明を実施するための形態】
【0007】
本開示を実施するための形態について図面を参照して説明する。なお、各図面においては、各要素の寸法および縮尺が実際の製品とは相違する場合がある。また、以下に説明する形態は、本開示を実施する場合に想定される例示的な一形態である。したがって、本開示の範囲は、以下に例示する形態には限定されない。
【0008】
A:実施形態
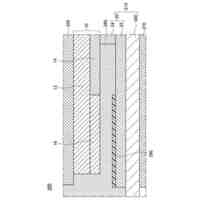
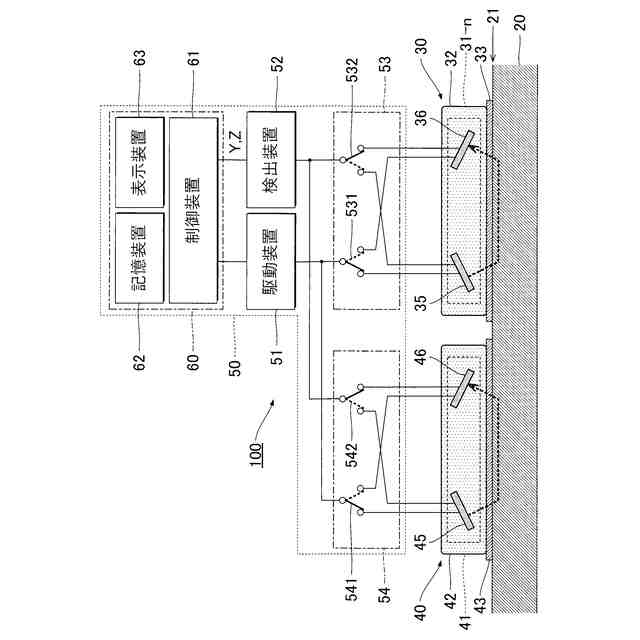
図1は、本開示のひとつの形態における応力解析システム100の構成を例示するブロック図である。応力解析システム100は、試験体20に作用する応力の状態(以下「応力状態」という)を非破壊により特定するための測定機器である。試験体20は、例えば船舶の甲板等で使用される金属製の板状部材である。
【0009】
本実施形態の応力解析システム100は、試験体20の応力状態として主応力差Δを特定する。主応力差Δは、最大主応力σ1と最小主応力σ2との差分(Δ=σ1-σ2)である。
【0010】
図1に例示される通り、応力解析システム100は、測定センサ30と補助センサ40と測定装置50とを具備する。測定センサ30および補助センサ40の各々は、試験体20に対する表面SH波の送信と、試験体20を伝搬した表面SH波の受信とを実行する超音波センサ(探触子)である。表面SH波は、試験体20の表面21に平行な方向に振動する超音波であり、図1に破線の矢印で図示される通り、試験体20の表面21の近傍を弾性波として伝搬する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士電機株式会社
タンク
1か月前
富士電機株式会社
タンク
1か月前
富士電機株式会社
自動販売機
1か月前
富士電機株式会社
半導体装置
1か月前
富士電機株式会社
自動販売機
6日前
富士電機株式会社
半導体装置
9日前
富士電機株式会社
半導体装置
1か月前
富士電機株式会社
半導体装置
1か月前
富士電機株式会社
エンコーダ
26日前
富士電機株式会社
エンコーダ
26日前
富士電機株式会社
商品収納装置
24日前
富士電機株式会社
飲料供給装置
1か月前
富士電機株式会社
飲料供給装置
1か月前
富士電機株式会社
商品収納装置
1か月前
富士電機株式会社
分析システム
27日前
富士電機株式会社
静止誘導電器
1か月前
富士電機株式会社
組み込み機器
25日前
富士電機株式会社
金銭処理装置
24日前
富士電機株式会社
通貨識別装置
11日前
富士電機株式会社
金銭処理装置
2日前
富士電機株式会社
飲料供給装置
6日前
富士電機株式会社
金銭処理装置
24日前
富士電機株式会社
半導体モジュール
26日前
富士電機株式会社
コンテナシステム
1か月前
富士電機株式会社
ガス処理システム
2日前
富士電機株式会社
部分放電測定装置
6日前
富士電機株式会社
自動販売機システム
6日前
富士電機株式会社
自動販売機システム
1か月前
富士電機株式会社
電力量調整システム
1か月前
富士電機株式会社
炭化珪素半導体装置
26日前
富士電機株式会社
診断装置、診断方法
1か月前
富士電機株式会社
半導体装置の製造方法
25日前
富士電機株式会社
半導体装置の製造方法
1か月前
富士電機株式会社
光源装置および分析システム
27日前
富士電機株式会社
半導体モジュールおよび製造方法
24日前
富士電機株式会社
半導体装置および半導体モジュール
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ