TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021813
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125787
出願日
2023-08-01
発明の名称
ロボットの制御システム、ロボット、ロボットの制御プログラム
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
15/04 20060101AFI20250206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】把持部による荷物の把持を含む複数の仕事種の仕事を直接的に実行することで、制御負担を軽減する。
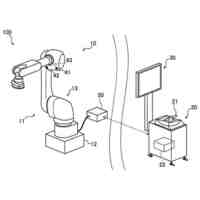
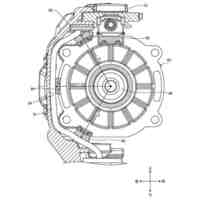
【解決手段】ロボットツール20を用い、対象物100で把持することを主目的としているが、対象物100に対する仕事種が把持ではなく、他の仕事種の場合、ロボットツール20で各種仕事に対応する工具を把持して、対象物100に対峙することも可能であるが、同一の仕事種を継続的に実行する場合は、把持状態の維持制御(把持部と把持している工具との相対位置制御等)の負担が大きい。そこで、ロボットツール20に代えて、対象物100に対する仕事種に応じて、図1及び図4に示すように、ロボットツール21EX(第1の実施の形態では、21EXA、21EXB、21EXCの3種類)を具備しておき、必要に応じて、ロボットツール20から、ロボットツール21EXに交換して、対象物100の把持とは別の仕事種に応じた仕事を実行する構成とした。
【選択図】図4
特許請求の範囲
【請求項1】
三次元的に稼働する腕部の手首部位で着脱可能であり、対象物に対する仕事種に応じてツールを装着し、前記対象物に対する仕事を実行するロボットの制御システムであって、
前記対象物に対する仕事種を判定する判定部と、
前記判定部で判定された仕事種に対応する前記ツールを装着させる動作を制御し、前記仕事種に応じた動作を制御する制御部と、
を有するロボットの制御システム。
続きを表示(約 950 文字)
【請求項2】
少なくとも前記ツールを装着可能な複数の腕部を備え、
一の腕部には、前記対象物に対する仕事種に応じたツールが選択的に装着され、
他の腕部には、前記対象物に対する、主たる作業の補助作業を実行可能な補助作業ツールが装着される、請求項1記載のロボットの制御システム。
【請求項3】
前記補助作業ツールが、人の手の機能を有し、前記対象物をホールドする、請求項2記載のロボットの制御システム。
【請求項4】
前記補助作業ツールは、前記一の腕部に装着されるツールの仕事種に応じた部品が収容された収容部を備え、
前記制御部は、前記収容部に収容された前記部品を用いて、前記仕事種に応じた動作を実行する、
請求項3記載のロボットの制御システム。
【請求項5】
前記制御部は、所定条件が成立した場合、前記一の腕部で用いている前記部品を前記収容部に収容された新たな前記部品に交換する、
請求項4記載のロボットの制御システム。
【請求項6】
前記補助作業ツールが、前記対象物に対する主たる作業に特化して監視する監視センサツールを備える、請求項2記載のロボットの制御システム。
【請求項7】
前記ロボットが、人型ロボットである、請求項1記載のロボットの制御システム。
【請求項8】
前記ロボットが、床面に対して駆動輪を介して支持された車両に搭載されている、請求項1記載のロボットの制御システム。
【請求項9】
前記判定部が、前記ツールに搭載された、前記対象物の画像を撮影して当該対象物の種類を識別するカメラ、及び、前記対象物の位置を特定するモーションプロセシングユニットを備えたセンサ部からの情報で判定する、請求項1記載のロボットの制御システム。
【請求項10】
三次元的に稼働する腕部の手首部位で着脱可能であり、対象物に対する仕事種に応じてツールを装着し、前記対象物に対する仕事を実行するロボットであって、
前記対象物及びツールの位置を特定するセンシングユニットを有するロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの制御システム、ロボット、ロボットの制御プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
工場の生産ラインにおいては作業を自動で行うための人型ロボットが使用されている。特許文献1には、人型ロボットの姿勢制御について記載されている。
【0003】
また、特許文献2には、弾性体アクチュエータで駆動されて複数の関節を有するロボットアームであって、ロボットアームの手先部に配設され支持面と接触することによりロボットアームを支持する手先支持部材と、手先支持部材と支持面との接触する力を制御すると同時にロボットアームの手先部の位置及び姿勢を制御する制御部により制御することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-093506号公報
WO2011/001569公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の人型ロボットによる倉庫内でのピッキング作業において、例えば、荷物が陳列されている棚から当該荷物(シャンプーや、コンディショナー、化粧品、歯磨き粉、カップラーメン、菓子袋等の形状や重さ、硬さ、壊れやすさが違うもの)をピックアップし、所定の包装体(箱等)に収容してパッキングするような場面において、現状では人の手に頼っている。
【0006】
また、ロボットの把持部の構造をフィンガータイプとして対応しようとしても、指や腕の動きが遅いため、生産性が低い。さらに、荷物の把持以外の仕事種を実行する場合、把持部で必要な工具(例えば、ドリル、スクリュードライバー等)を把持して作業することになり、把持状態の管理制御が加わった間接的な作業となるため、制御負担が大きくなる場合がある。
【0007】
本発明は上記事実を考慮し、把持部による荷物の把持を含む複数の仕事種の仕事を直接的に実行することで、制御負担を軽減することができるロボットの制御システム、ロボット、ロボットの制御プログラムを得ることが目的である。
【課題を解決するための手段】
【0008】
本発明の態様1に係るロボットの制御システムは、三次元的に稼働する腕部の手首部位で着脱可能であり、対象物に対する仕事種に応じてツールを装着し、前記対象物に対する仕事を実行するロボットの制御システムであって、前記対象物に対する仕事種を判定する判定部と、前記判定部で判定された仕事種に対応する前記ツールを装着させる動作を制御し、前記仕事種に応じた動作を制御する制御部と、を有している。
【0009】
本発明の態様1によれば、制御部は、対象物に対する仕事種を判定する判定部で判定された仕事種に対応するツールを装着させる動作を制御すると共に、仕事種に応じた動作を制御する。
【0010】
これにより、把持部による荷物の把持を含む複数の仕事種の仕事を直接的に実行することで、制御負担を軽減することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
1日前
アピュアン株式会社
衝撃工具
2日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
打ち込み工具
1日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
1日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
1日前
川崎重工業株式会社
ロボットシステム、および、画像処理方法
1日前
マックス株式会社
ステープル取り外し装置
1日前
マックス株式会社
ステープル取り外し装置
1日前
大日本印刷株式会社
ロボット
1日前
キヤノン株式会社
ロボットシステムおよび製造方法
1日前
トヨタ自動車株式会社
ロボット制御装置、ロボット制御方法、及びプログラム
1日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの監視方法
1日前
株式会社マキタ
ドライバドリル及び震動ドライバドリル
1日前
トヨタ自動車株式会社
ピッキングシステム、ピッキングロボット、及びピッキング方法
1日前
パナソニックIPマネジメント株式会社
吸着ハンド及びロボット装置
1日前
オムロン株式会社
ロボットを制御するシステム、方法およびプログラム
1日前
株式会社安川電機
ロボット制御システム、ロボットコントローラ、及びロボット制御方法
1日前
ニデックドライブテクノロジー株式会社
ねじ締め装置、ねじ締め装置の制御システム、および複数のねじ締め装置の制御方法
1日前
キヤノン株式会社
ロボットシステム、ロボットシステムの制御方法、移動装置、移動装置の制御方法、物品の製造方法、制御プログラム及び記録媒体
1日前
他の特許を見る











 特許ウォッチ
特許ウォッチ