TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014633
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117344
出願日
2023-07-19
発明の名称
ロボット制御装置、キャリブレーション方法及びそれに用いられるセンサ装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250123BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットとセンサとの位置関係を適切に算出することができるロボット制御装置、キャリブレーション方法及びそれに用いられるセンサ装置を提供することである。
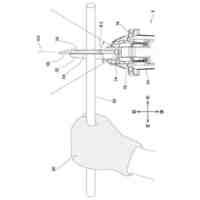
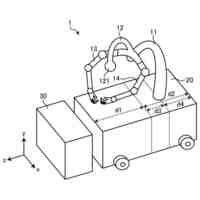
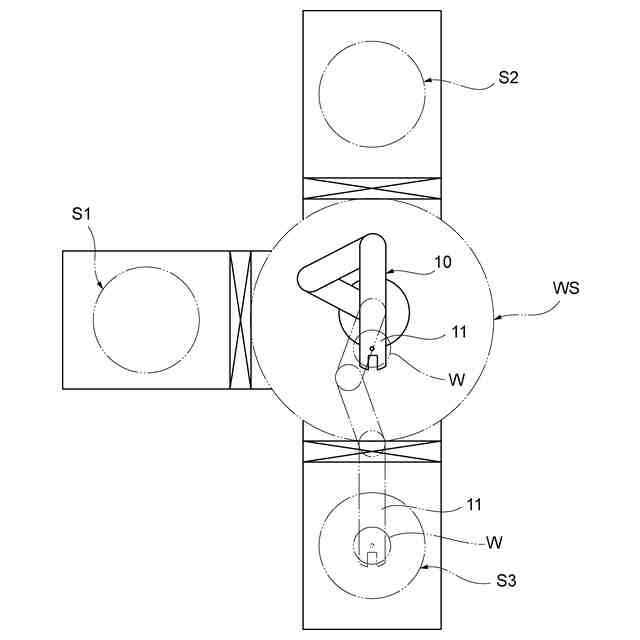
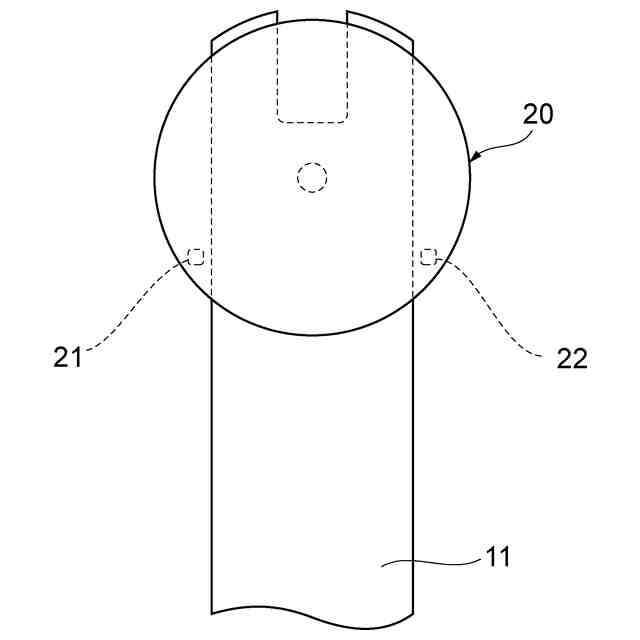
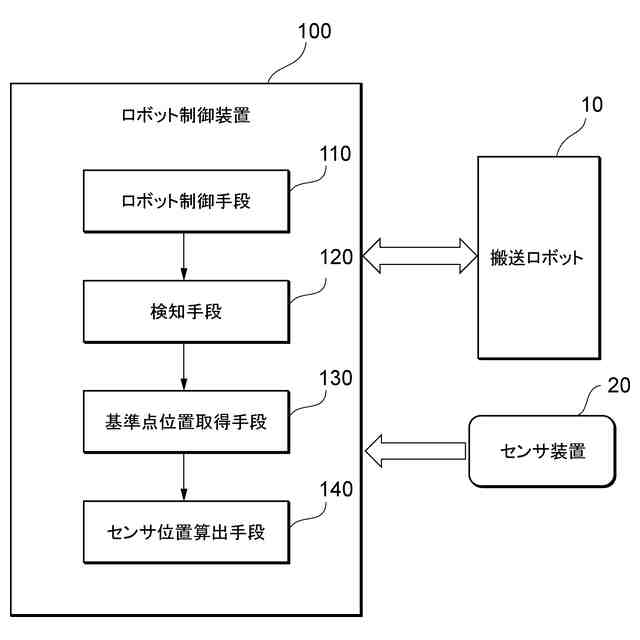
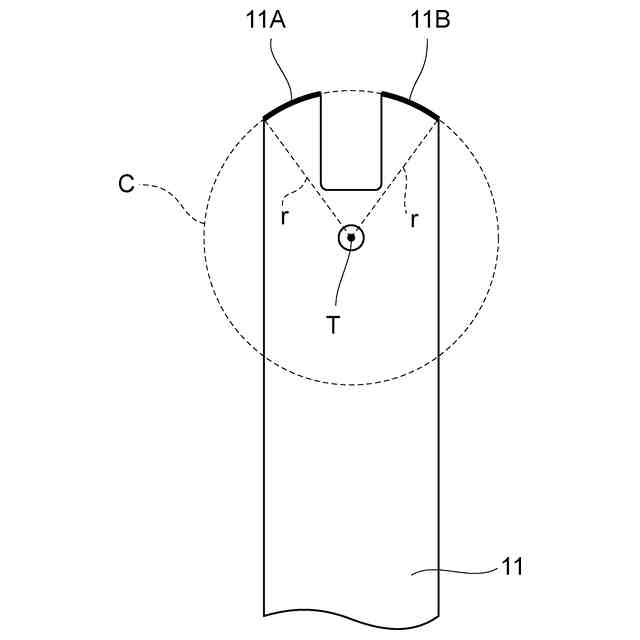
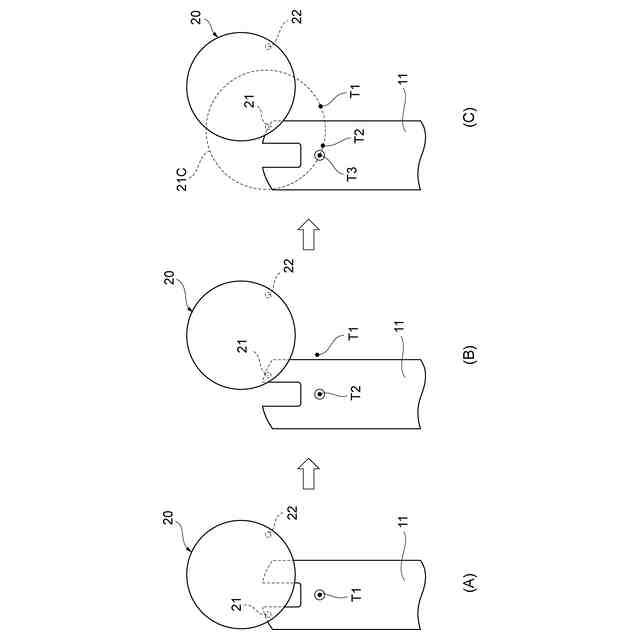
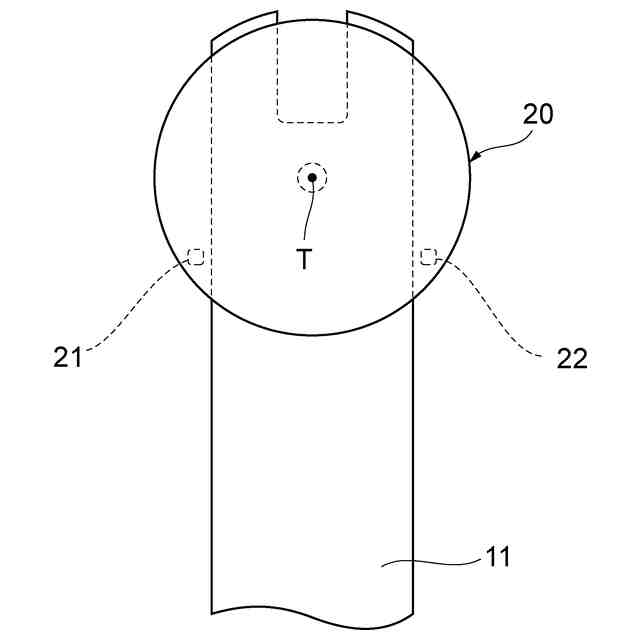
【解決手段】ロボット制御装置100は、ロボット10における所定の基準点Tを中心とする円弧形状を一部に構成する当該ロボット10を動作させるロボット制御手段110と、ロボット10を動作させることにより、円弧形状の一部をセンサ装置20に設けられているセンサ21,22により複数回検知する検知手段120と、検知手段120によって検知された際の基準点Tの複数の位置T1~T3を取得する基準点位置取得手段130と、複数の位置T1~T3に基づいて、センサ21,22の位置を算出するセンサ位置算出手段140と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
ロボットの動作を制御するロボット制御装置であって、
ロボットにおける所定の基準点を中心とする円弧形状を一部に構成する当該ロボットを動作させるロボット制御手段と、
前記ロボット制御手段によって前記ロボットを動作させることにより、前記円弧形状の一部をセンサ装置に設けられているセンサにより複数回検知する検知手段と、
前記検知手段によって検知された際の前記基準点の複数の位置を取得する基準点位置取得手段と、
前記複数の位置に基づいて、前記センサの位置を算出するセンサ位置算出手段と、を備える、
ロボット制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記センサ位置算出手段は、前記センサにより検知された際の前記基準点の少なくとも2つの位置、及び前記円弧形状を一部に含むように構成される円の直径に基づいて、前記センサの位置を算出する、
請求項1に記載のロボット制御装置。
【請求項3】
前記センサ位置算出手段は、前記センサにより検知された際の前記基準点の少なくとも3つの位置に基づいて、前記センサの位置を算出する、
請求項1に記載のロボット制御装置。
【請求項4】
前記ロボット制御手段は、
前記基準点の位置と、前記センサ位置算出手段によって算出された前記センサの位置とに基づいて、前記センサ装置を保持するように前記ロボットを動作させ、
前記基準点の位置と前記センサの位置との相対位置を把握する、
請求項1に記載のロボット制御装置。
【請求項5】
ロボットの動作を制御するロボット制御装置が実行するキャリブレーション方法であって、
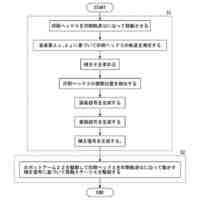
ロボットにおける所定の基準点を中心とする円弧形状を一部に構成する当該ロボットを動作させるロボット制御ステップと、
前記ロボット制御ステップにおいて前記ロボットを動作させることにより、前記円弧形状の一部をセンサ装置に設けられているセンサにより複数回検知する検知ステップと、
前記検知ステップで検知された際の前記基準点の複数の位置を取得する基準点位置取得ステップと、
前記複数の位置に基づいて、前記センサの位置を算出するセンサ位置算出ステップと、を含む、
キャリブレーション方法。
【請求項6】
ロボットの動作を制御するロボット制御装置が実行するキャリブレーション方法に用いられるセンサ装置であって、
前記キャリブレーション方法は、
ロボットにおける所定の基準点を中心とする円弧形状を一部に構成する当該ロボットを動作させるロボット制御ステップと、
前記ロボット制御ステップにおいて前記ロボットを動作させることにより、前記円弧形状の一部を当該センサ装置に設けられているセンサにより複数回検知する検知ステップと、
前記検知ステップで検知された際の前記基準点の複数の位置を取得する基準点位置取得ステップと、
前記複数の位置に基づいて、前記センサの位置を算出するセンサ位置算出ステップと、を含む、
センサ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置、キャリブレーション方法及びそれに用いられるセンサ装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、産業界において、多くのロボットが普及している。当該ロボットは、例えば、電子部品及び機械部品の組み立て、溶接及び搬送等に用いられ、工場の生産ラインの効率化及び自動化が図られている。
【0003】
半導体製造装置に用いられるウエハを搬送する搬送ロボットでは、ウエハを適切な位置へ搬送するためのティーチングを行うが、その精度は、操作者の知識及び熟練度などに依存し、また、操作者の作業スペースが十分に確保できない程の省スペース化が求められている場合もあるため、ティーチングの自動化が図られている。
【0004】
例えば、搬送ロボットにカメラ又はセンサを取り付けて、当該搬送ロボットと目標位置との位置関係、及び障害物などの周辺環境を把握して、対象物を適切に目標位置まで搬送する技術が知られている。
【0005】
特許文献1では、3つの光学センサが設けられた基板型治具がハンドにより保持された状態で、基板保持部を回転させることにより当該基板保持部上に予め設けられている目印の円周状の回転軌跡を形成する。そして、3つの光学センサからそれぞれ得られた回転軌跡に対する相対位置に基づいて、ハンドの基板保持部に対する平面視における相対位置を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2022-148237号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1では、ハンドにより保持された基板型治具に設けられた3つの光学センサにより得られた相対位置に基づいて、ハンドと基板保持部との相対位置を算出しているが、ハンドと3つの光学センサとの位置関係については、何ら開示されていない。
【0008】
3つの光学センサが基板型治具に設けられる際に、ズレたり、個体バラツキがあったりすることが考えられ、また、ハンドにより基板型治具が保持される際も、ズレたりする場合が考えられる。すなわち、ハンドと3つの光学センサとの位置関係がズレてしまい、その結果、ハンド(ロボット)の基板保持部(例えば、基板を設置する目標位置など)に対する位置が適切に算出できないという問題がある。
【0009】
そこで、本発明は、ロボットとセンサとの位置関係を適切に算出することができるロボット制御装置、キャリブレーション方法及びそれに用いられるセンサ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一態様に係るロボット制御装置は、ロボットの動作を制御するロボット制御装置であって、ロボットにおける所定の基準点を中心とする円弧形状を一部に構成する当該ロボットを動作させるロボット制御手段と、ロボット制御手段によってロボットを動作させることにより、円弧形状の一部をセンサ装置に設けられているセンサにより複数回検知する検知手段と、検知手段によって検知された際の基準点の複数の位置を取得する基準点位置取得手段と、複数の位置に基づいて、センサの位置を算出するセンサ位置算出手段と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
1日前
川崎重工業株式会社
ロボットリスト
1日前
川崎重工業株式会社
ロボットアーム
1日前
川崎重工業株式会社
ロボットアーム
1日前
日本車輌製造株式会社
締め付け工具
1日前
川崎重工業株式会社
ロボットシステム
1日前
トヨタ自動車株式会社
制御装置及び制御方法
1日前
モトコマ株式会社
寄せポンチホルダー
2日前
株式会社DailyColor
ロボットハンド
2日前
個人
ターンバックル用工具
8日前
有限会社松尾エンジニアリング
連結部材
2日前
株式会社SHIN‐JIGEN
上肢アシスト装置
7日前
株式会社マキタ
作業機
14日前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
14日前
株式会社不二越
オフラインダイレクトティーチング装置
8日前
ファナック株式会社
人間の技術に基づく経路生成
8日前
トヨタ自動車株式会社
取り出し治具
14日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
2日前
ソフトバンクグループ株式会社
ロボット
1日前
株式会社イチネンアクセス
ソケットおよび回転工具
1日前
セイコーエプソン株式会社
印刷方法およびロボットシステム
1日前
トライエンジニアリング株式会社
ロボット装置
2日前
パナソニックIPマネジメント株式会社
工具システム
8日前
パナソニックIPマネジメント株式会社
工具システム
8日前
トヨタ自動車株式会社
ロボット制御システム、その制御方法、及びプログラム
2日前
セイコーエプソン株式会社
ロボットシステムおよび位置検出方法
1日前
セイコーエプソン株式会社
シミュレーション装置及びプログラム
8日前
テイ・エス テック株式会社
位置特定装置、ロボットおよび位置特定方法
8日前
株式会社ユーシン精機
コンプライアンス機構を備えた保持装置
14日前
東京電力ホールディングス株式会社
長尺アーム
1日前
トヨタ自動車株式会社
ロボット駆動装置、ロボット駆動方法及びロボット駆動プログラム
2日前
株式会社サーマルプラント
ボルト緩締装置、及びボルト緩締装置の使用方法
7日前
朝日インテック株式会社
付勢力発生装置及び動作補助装置
8日前
株式会社東芝
拾得機能付き調査器具
7日前
株式会社TJMデザイン
工具用ホルダ
8日前
ニデックインスツルメンツ株式会社
産業用ロボットの補正値算出方法および産業用ロボットの制御方法
8日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ