TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001693
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101306
出願日
2023-06-21
発明の名称
車両制御装置、車両制御方法およびコンピュータプログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
50/12 20120101AFI20241226BHJP(車両一般)
要約
【課題】コストを抑えつつ適切な状況においてアクセルペダル操作に応じた駆動力を抑制する。
【解決手段】車両制御装置100は、センサ装置200の検知結果を利用して駐車列を特定する駐車列特定部11と、検知結果を利用して車両が駐車場内に存在するか否かを判定する駐車場内判定部12と、アクセルペダルの操作状態を取得する操作状態取得部13と、車両が駐車場内に存在すると判定され、且つ、アクセルペダルの操作量が予め定められた閾値量以上であるとの条件を含む駆動力抑制条件が成立した場合に、操作量に応じた車両の駆動力を抑制する駆動力抑制制御を実行する制御部14と、駐車列の態様に応じて駆動力抑制条件を調整する条件調整部15と、を備える。条件調整部は、駐車列の態様が、第1態様である場合に、駐車場内の駐車列である尤もらしさが第1態様よりも高い第2態様である場合に比べて、駆動力抑制条件としてより成立し難い条件を設定する。
【選択図】図1
特許請求の範囲
【請求項1】
周囲の環境を検知可能なセンサ装置(200)とアクセルペダル(310)とを有する車両(V1)を制御する車両制御装置(100)であって、
前記センサ装置の検知結果を利用して、前記車両の周囲において前記車両とは異なる駐車車両(PV)と駐車枠(PA)とのうちの少なくとも一方が、予め定められた連続閾値数以上連続して共通の方向に並んだ駐車列を特定する駐車列特定部(11)と、
前記センサ装置の検知結果を利用して、前記車両が、特定された前記駐車列を含む駐車場内に存在するか否かを判定する駐車場内判定部(12)と、
前記アクセルペダルの操作状態を取得する操作状態取得部(13)と、
前記車両が前記駐車場内に存在すると判定され、且つ、前記操作状態は前記アクセルペダルの操作量が予め定められた閾値量以上の状態であるとの条件を含む駆動力抑制条件が成立した場合に、前記操作量に応じた前記車両の駆動力を抑制する駆動力抑制制御を実行する制御部(14)と、
特定された前記駐車列の態様に応じて、前記駆動力抑制条件を調整する条件調整部(15)と、
を備え、
前記条件調整部は、前記駐車列の態様が、予め定められた第1態様である場合に、前記駐車列が前記駐車場内の駐車列である尤もらしさが前記第1態様よりも高い態様として予め定められた第2態様である場合に比べて、前記駆動力抑制条件として、より成立し難い条件を設定する、
車両制御装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記第1態様は、前記車両の前方左右のうちのいずれか一方に、前記共通の方向として前記車両の進行方向に沿って、前記駐車車両と前記駐車枠とのうちの少なくとも一方が前記連続閾値数として第1数以上連続して並んだ態様であり、
前記第2態様は、前記車両の前方左右のうちの両方に、前記共通の方向として前記進行方向に沿って、前記駐車車両と前記駐車枠とのうちの少なくとも一方が前記連続閾値数として前記第1数以上連続して並んだ態様である、車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記駐車列に含まれる前記駐車車両の車両長さ方向は、前記進行方向に対して交差する方向である、車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記第2態様は、前記車両の前方左右のうちの少なくとも一方に、前記共通の方向として前記進行方向に沿って、前記駐車車両と前記駐車枠とのうちの少なくとも一方が前記連続閾値数として第1数以上連続して並んだ態様であり、
前記第1態様は、前記車両の前方、後方、左側、右側のうちの少なくとも1つに、前記駐車車両と前記駐車枠とのうちの少なくとも一方が、前記連続閾値数として前記第1数よりも少ない第2数以上であって前記第1数よりも少ない数連続して前記共通の方向に並んだ態様である、車両制御装置。
【請求項5】
請求項4に記載の車両制御装置において、
前記第1態様において、前記駐車列に含まれる前記駐車車両の車両長さ方向は、前記車両の進行方向に対して交差する方向である、車両制御装置。
【請求項6】
周囲の環境を検知可能なセンサ装置(200)とアクセルペダル(310)とを有する車両(V1)を、車両制御装置(100)を用いて制御する車両制御方法であって、
前記車両制御装置において、前記センサ装置の検知結果を利用して、前記車両の周囲において前記車両とは異なる駐車車両(PV)と駐車枠(PA)とのうちの少なくとも一方が、予め定められた連続閾値数以上連続して共通の方向に並んだ駐車列を特定する工程(S105)と、
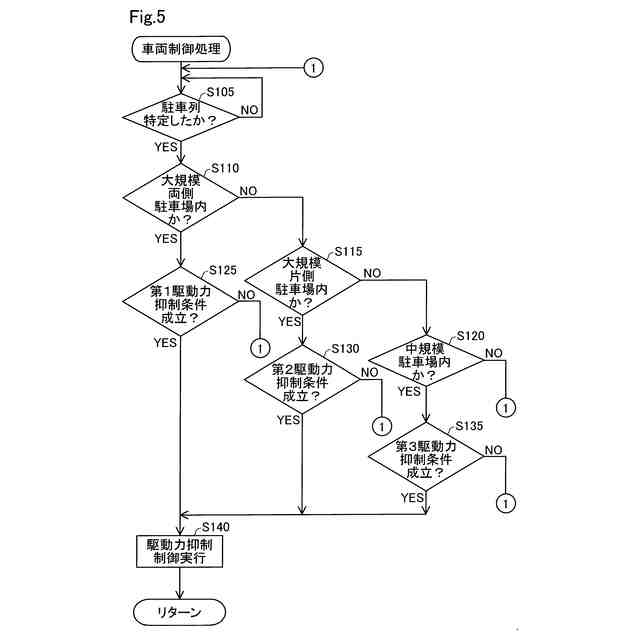
前記車両制御装置において、前記車両が、特定された前記駐車列を含む駐車場内に存在するか否かを判定する工程(S110、S115、S120)と、
前記車両制御装置において、前記アクセルペダルの操作状態を取得する工程と、
前記車両制御装置において、前記車両が前記駐車場内に存在すると判定され、且つ、前記操作状態は前記アクセルペダルの操作量が予め定められた閾値量以上の状態であるとの条件を含む駆動力抑制条件が成立した場合に、前記操作量に応じた前記車両の駆動力を抑制する駆動力抑制制御を実行する工程(S140)と、
前記車両制御装置において、特定された前記駐車列の態様に応じて、前記駆動力抑制条件を調整する工程(S125、S130、S135)と、
を備え、
前記駆動力抑制条件を調整する工程は、前記駐車列の態様が、予め定められた第1態様である場合に、前記駐車列が前記駐車場内の駐車列である尤もらしさが前記第1態様よりも高い態様として予め定められた第2態様である場合に比べて、前記駆動力抑制条件として、より成立し難い条件を設定する工程を含む、
車両制御方法。
【請求項7】
周囲の環境を検知可能なセンサ装置(200)とアクセルペダル(310)とを有する車両(V1)を制御するためのコンピュータプログラムであって、
前記センサ装置の検知結果を利用して、前記車両とは異なる駐車車両(PV)と前記車両の周囲の駐車枠(PA)とのうちの少なくとも一方が、予め定められた連続閾値数以上連続して共通の方向に並んだ駐車列を特定する機能と、
前記車両が、特定された前記駐車列を含む駐車場内に存在するか否かを判定する工程と、
前記アクセルペダルの操作状態を取得する機能と、
前記車両が前記駐車場内に存在すると判定され、且つ、前記操作状態は前記アクセルペダルの操作量が予め定められた閾値量以上の状態であるとの条件を含む駆動力抑制条件が成立した場合に、前記操作量に応じた前記車両の駆動力を抑制する駆動力抑制制御を実行する機能と、
特定された前記駐車列の態様に応じて、前記駆動力抑制条件を調整する機能と、
をコンピュータに実現させ、
前記駆動力抑制条件を調整する機能は、前記駐車列の態様が、予め定められた第1態様である場合に、前記駐車列が前記駐車場内の駐車列である尤もらしさが前記第1態様よりも高い態様として予め定められた第2態様である場合に比べて、前記駆動力抑制条件として、より成立し難い条件を設定する機能を含む、
コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法およびコンピュータプログラムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
従来から、車両において、ドライバがブレーキペダルを踏む意図を有しながらアクセルペダルを誤って踏み込んだ場合に、アクセルペダル操作に応じた駆動力を抑制する技術が提案されている。アクセルペダルの誤踏み込み操作は、主として駐車場内において行われること、また、駐車場外において駆動力が抑制されてしまうと、必要な急加速ができなくなり通常走行が制限されてしまうことを考慮して、特許文献1の車両制御システムでは、自車両が駐車場内に存在することが特定された場合に、上記駆動力を抑制している。
【先行技術文献】
【特許文献】
【0003】
特開2021-85375号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の車両制御システムでは、自車両が駐車場内に存在することを特定するために、自車両の駐車場への入場と自車両の駐車場からの退場とを、狭域通信システムを用いて検知している。このため、駐車場と車両のいずれにも通信設備を設けなければならず、ユーザに大きなコスト負担を強いるという問題がある。そこで、適切な状況においてアクセルペダル操作に応じた駆動力が抑制されることを、コストを抑えつつ実現可能な技術が望まれる。
【課題を解決するための手段】
【0005】
本開示の一形態として、周囲の環境を検知可能なセンサ装置(200)とアクセルペダル(310)とを有する車両(V1)を制御する車両制御装置(100)が提供される。この車両制御装置は、前記センサ装置の検知結果を利用して、前記車両の周囲において前記車両とは異なる駐車車両(PV)と駐車枠(PA)とのうちの少なくとも一方が、予め定められた連続閾値数以上連続して共通の方向に並んだ駐車列を特定する駐車列特定部(11)と、前記センサ装置の検知結果を利用して、前記車両が、特定された前記駐車列を含む駐車場内に存在するか否かを判定する駐車場内判定部(12)と、前記アクセルペダルの操作状態を取得する操作状態取得部(13)と、前記車両が前記駐車場内に存在すると判定され、且つ、前記操作状態は前記アクセルペダルの操作量が予め定められた閾値量以上の状態であるとの条件を含む駆動力抑制条件が成立した場合に、前記操作量に応じた前記車両の駆動力を抑制する駆動力抑制制御を実行する制御部(14)と、特定された前記駐車列の態様に応じて、前記駆動力抑制条件を調整する条件調整部(15)と、を備える。前記条件調整部は、前記駐車列の態様が、予め定められた第1態様である場合に、前記駐車列が前記駐車場内の駐車列である尤もらしさが前記第1態様よりも高い態様として予め定められた第2態様である場合に比べて、前記駆動力抑制条件として、より成立し難い条件を設定する。
【0006】
この形態の車両制御装置によれば、周囲の環境を検知可能なセンサ装置の検知結果を利用して、駐車列を特定し、また、車両が、特定された駐車列を含む駐車場内に存在するか否かを判定するので、車両が駐車場内に存在するか否かを判定するための通信装置を設けることを要せず、コストを抑えることができる。また、車両が駐車場内に存在すると判定され、且つ、操作状態はアクセルペダルの操作量が予め定められた閾値量以上の状態であるとの条件を含む駆動力抑制条件が成立した場合に、操作量に応じた車両の駆動力を抑制し、さらに、駐車列の態様が、予め定められた第1態様である場合に、駐車列が駐車場内の駐車列である尤もらしさが第1態様よりも高い態様として予め定められた第2態様である場合に比べて、駆動力抑制条件として、より成立し難い条件を設定するので、適切な状況においてアクセルペダル操作に応じた駆動力が抑制されることを実現できる。このようなことから、この形態の車両制御装置によれば、適切な状況においてアクセルペダル操作に応じた駆動力が抑制されることを、コストを抑えつつ実現できる。
【図面の簡単な説明】
【0007】
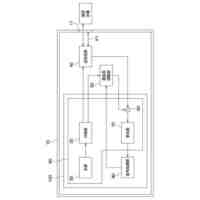
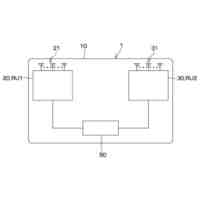
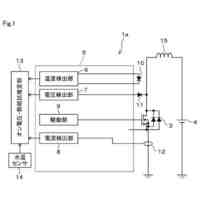
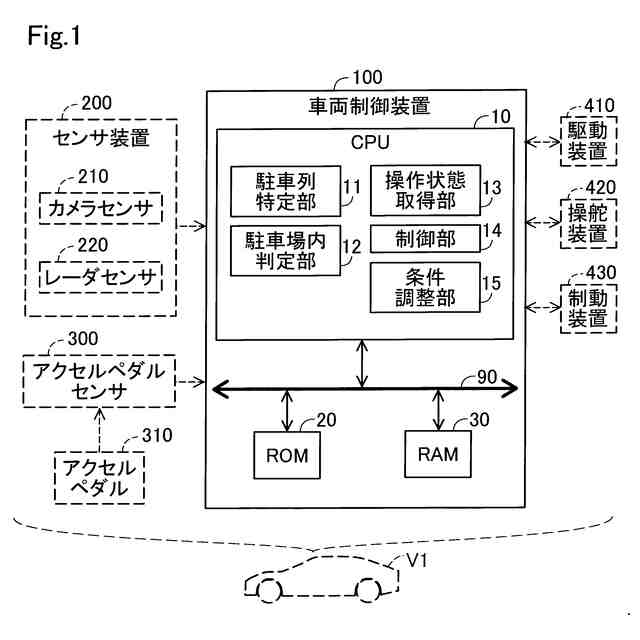
本開示の一実施形態としての車両制御装置の概略構成を示すブロック図である。
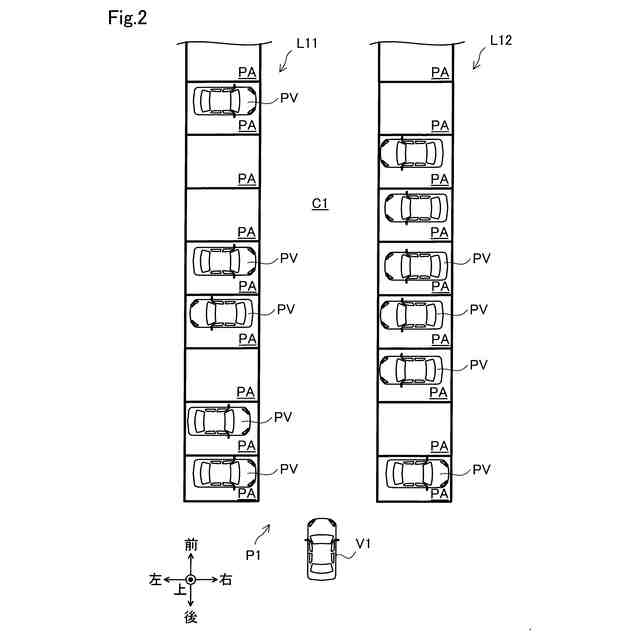
大規模両側駐車場の一例を示す説明図である。
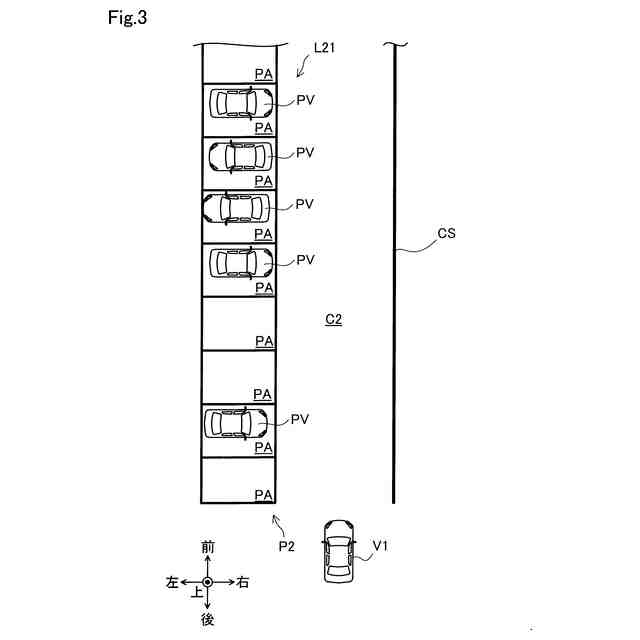
大規模片側駐車場の一例を示す説明図である。
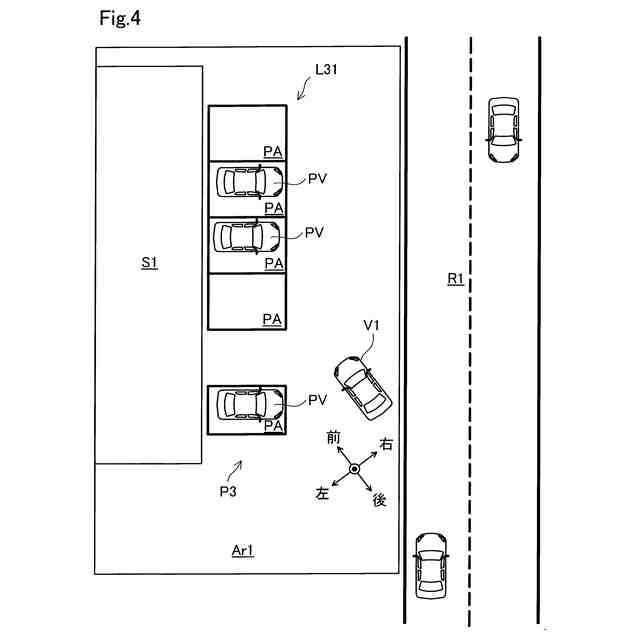
中規模駐車場の一例を示す説明図である。
第1実施形態における車両制御処理の手順を示すフローチャートである。
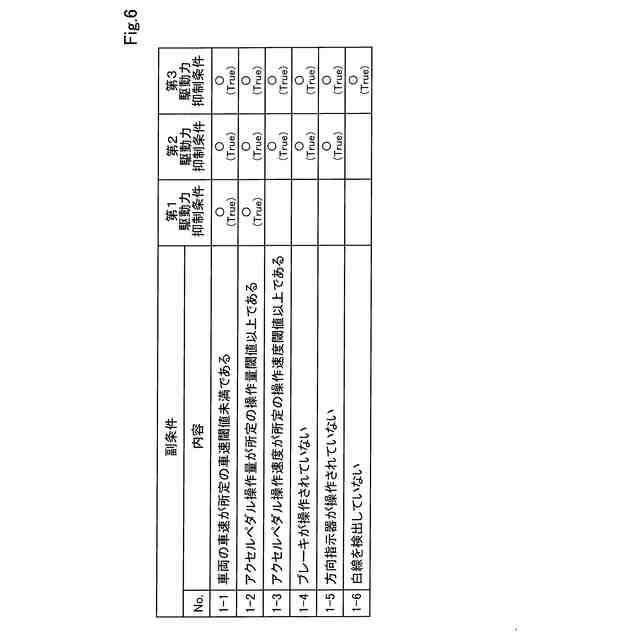
第1実施形態における駆動力抑制条件の内容を示す説明図である。
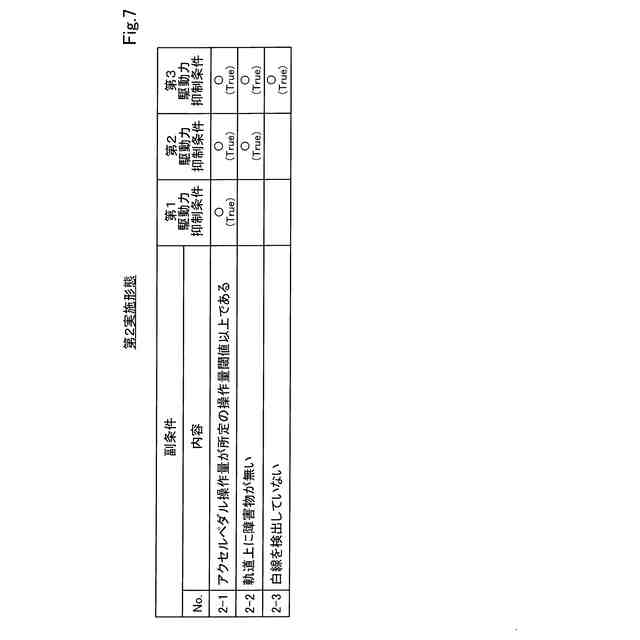
第2実施形態における駆動力抑制条件の内容を示す説明図である。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A1.装置構成:
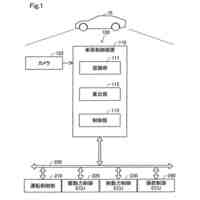
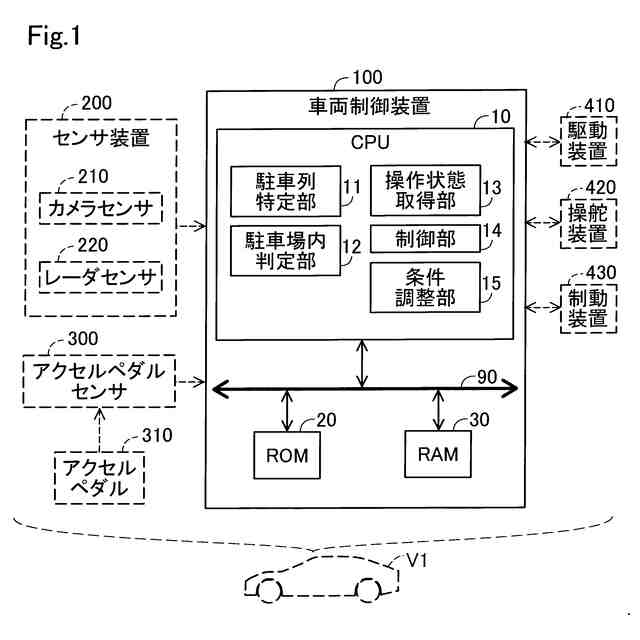
図1に示す第1実施形態の車両制御装置100は、車両V1に搭載されて用いられる。車両制御装置100は、車両制御装置100の他に、センサ装置200と、アクセルペダルセンサ300と、アクセルペダル310と、駆動装置410と、操舵装置420と、制動装置430とを備える。
【0009】
センサ装置200は、車両V1の周囲の環境を検知可能なセンサ群からなる。具体的には、センサ装置200は、カメラセンサ210と、レーダセンサ220とを含む。カメラセンサ210は、車両V1の周囲を撮像し、得られた撮像画像データを画像処理することにより、車両V1の周囲の情報、例えば、他車両や歩行者や電柱等の構造物といった障害物や、白線等の情報を検知する。カメラセンサ210は、少なくとも車両V1の前方の画像を取得する。なお、車両V1の前方に限らず、左右方向や後方の画像を取得するように、例えば、複数のカメラセンサ210を備える構成としてもよい。レーダセンサ220は、所定波長の電磁波(電波や光)を射出し、受信する反射波を利用して、車両V1の周囲の障害物を検知する。レーダセンサ220として、例えば、ミリ波レーダや、LiDAR(Light Detection and Ranging)等を用いることができる。LiDARであれば、所定波長の光を走査しながら射出し、その反射光を受光し、反射波のピークを検出した位置から障害物の方角を特定し、光の射出から反射波の受光までの時間(TOF:Time Of Flight)を利用して、障害物までの距離を特定できる。センサ装置200は、検知結果を車両制御装置100に通知する。車両制御装置100では、図示しない機能部において、障害物の特定や、白線検出など、車両V1の運転支援に用いられる情報を得るための各種処理が実行される。
【0010】
駆動装置410は、車両V1を駆動させるための装置群である。駆動装置410は、エンジンやモータジェネレータなどの駆動力を生じさせる装置と、エンジンやモータジェネレータを駆動させるための各種アクチュエータと、かかるアクチュエータを制御するためのECU(Electronic Control Unit)とを備える。車両V1は、エンジン車、ハイブリッド車(HEV)、プラグインハイブリッド車(PHEV)、電気車(EV)、燃料電池車両(FCV、FCHV)など、任意の種類の車両として構成してもよい。操舵装置420は、車両V1の操舵を行うための装置群である。操舵装置420は、ステアリングホイールと、操舵角センサと、アシスト用油圧装置と、油圧発生のためのアクチュエータと、操舵を制御するためのECUとを備える。制動装置430は、車両V1に制動力を生じさせるための装置群である。制動装置430は、ディスクロータと、ブレーキパッドと、ブレーキ用油圧装置と、油圧発生のためのアクチュエータと、制動を制御するためのECUとを備える。上述の駆動装置410、操舵装置420および制動装置430は、いずれも車両制御装置100との間で通信を行う。このとき、車両制御装置100は、これらの装置410~430に対して制御信号を送信し、他方、装置410~430から各装置における動作状態を示す信号を受信する。本実施形態では、上述の「動作状態を示す信号」には、車両V1の車速、ブレーキの操作有無、方向指示器の操作有無などを示す信号が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
回転子
29日前
株式会社デンソー
変調器
22日前
株式会社デンソー
生体電極
15日前
株式会社デンソー
駆動回路
23日前
株式会社デンソー
回転電機
2日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
検出装置
3日前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
電子装置
29日前
株式会社デンソー
光干渉計
1日前
株式会社デンソー
電子部品
1か月前
株式会社デンソー
整流回路
16日前
株式会社デンソー
清掃装置
1か月前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
17日前
株式会社デンソー
半導体装置
22日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
送受信装置
2日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
電磁継電器
15日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
輻射ヒータ
29日前
株式会社デンソー
慣性センサ
29日前
株式会社デンソー
レーダ装置
29日前
株式会社デンソー
レーダ装置
29日前
株式会社デンソー
電磁継電器
29日前
株式会社デンソー
電力変換器
1か月前
株式会社デンソー
異常検出装置
22日前
株式会社デンソー
負荷駆動装置
24日前
株式会社デンソー
血流促進装置
22日前
株式会社デンソー
電力変換装置
29日前
株式会社デンソー
電力変換装置
29日前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
車両制御装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ