TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024178831
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023097274
出願日
2023-06-13
発明の名称
車両制御装置、車両制御方法、及び車両制御プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B60W
50/12 20120101AFI20241218BHJP(車両一般)
要約
【課題】踏み間違い防止制御を行う場合に車両の挙動が不安定となるのを抑制することができる。
【解決手段】車両制御装置(10)は、車両(100)の車輪が接触している段差の高さを推定する段差推定部(40)と、前記段差の高さに応じて、前記段差の乗り越えを制限する乗り越え制限制御と、所定速度以下で前記段差を乗り越える低速乗り越え制御と、の何れかの踏み間違い防止制御を行う制御部(41)と、を備える。
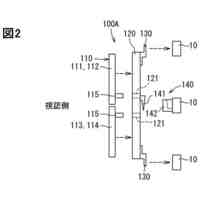
【選択図】図2
特許請求の範囲
【請求項1】
車両(100)の車輪が接触している段差の高さを推定する段差推定部(40)と、
前記段差の高さに応じて、前記段差を乗り越えないように制限する乗り越え制限制御と、所定速度以下で前記段差を乗り越える低速乗り越え制御と、の何れかの踏み間違い防止制御を行う制御部(41)と、
を備えた車両制御装置(10)。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、予め定めた許可条件を満たす場合に前記踏み間違い防止制御を行う
請求項1記載の車両制御装置。
【請求項3】
前記許可条件は、前記車両の速度が所定速度以下である、前記車両のアクセルのアクセル開度が所定アクセル開度より大きい、前記車両のブレーキのブレーキ油圧が所定閾値以下である、前記車両のパーキングブレーキがオフである、及び前記車両のシフトがパーキング及びニュートラル以外である、の少なくとも1つを含む
請求項2記載の車両制御装置。
【請求項4】
前記制御部は、路面の勾配に応じた前記所定アクセル開度を取得し、取得した前記所定アクセル開度に基づいて、前記許可条件を満たすか否かを判定する
請求項3記載の車両制御装置。
【請求項5】
前記制御部は、前記許可条件を満たしてから所定時間以内の場合のみ前記踏み間違い防止制御を行う
請求項2~4の何れか1項に記載の車両制御装置。
【請求項6】
前記制御部は、前記乗り越え制限制御として、前記車両を停止させるための第1のトルクと、前記段差に応じた第2のトルクと、路面の勾配に応じた第3のトルクと、に基づいて、踏み間違い制御用トルクを算出し、算出した踏み間違い制御用トルクを前記車輪に付与する制御を行う
請求項1記載の車両制御装置。
【請求項7】
前記制御部は、前記低速乗り越え制御として、前記車両を所定速度で走行させるため第1のトルクと、前記段差に応じた第2のトルクと、路面の勾配に応じた第3のトルクと、に基づいて、踏み間違い制御用トルクを算出し、算出した踏み間違い制御用トルクを前記車輪に付与する制御を行う
請求項1記載の車両制御装置。
【請求項8】
前記制御部は、前記車両のドライバーのアクセル操作量に応じたドライバー要求トルクと、前記踏み間違い防止制御用トルクと、のうちトルク値が小さい方のトルクを前記車輪に付与する
請求項6又は請求項7記載の車両制御装置。
【請求項9】
前記制御部は、前記踏み間違い防止制御用トルクが異常値の場合、前記踏み間違い防止制御の実行を制限する
請求項6又は請求項7記載の車両制御装置。
【請求項10】
前記制御部は、前記第1のトルク及び前記第2のトルクの少なくとも一方が異常値の場合、前記踏み間違い防止制御の実行を制限する
請求項6又は請求項7記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法、及び車両制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、車両の走行を支援する車両の走行支援装置であって、車輪が接触したことを検出できる段差のうち、車両を停止させるための段差のことを車止め用の段差とした場合、車輪が接触した前記段差が前記車止め用の段差であるか否かを判定する判定処理を実施する段差判定部と、前記判定処理によって前記段差が前記車止め用の段差であると判定されたときには、車両の制動力の増大によって車両を停止させることを要求する停止要求制御を実施する制駆動力設定部と、を備える車両の走行支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-093761号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両が駐車する場合等のように、車輪が車止め等の段差に接触する場合、踏み間違いを防止するための踏み間違い防止制御が不適切な場合は、車両の挙動が不安定となる。
【0005】
本開示は、踏み間違い防止制御を行う場合に車両の挙動が不安定となるのを抑制することができる車両制御装置、車両制御方法、及び車両制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1態様に係る車両制御装置は、車両の車輪が接触している段差の高さを推定する段差推定部と、前記段差の高さに応じて、前記段差を乗り越えないように制限する乗り越え制限制御と、所定速度以下で前記段差を乗り越える低速乗り越え制御と、の何れかの踏み間違い防止制御を行う制御部と、を備える。
【0007】
第2態様に係る車両制御方法は、少なくとも1つのプロセッサが、車両の車輪が接触している段差の高さを推定し、前記段差の高さに応じて、前記段差を乗り越えないように制限する乗り越え制限制御と、所定速度以下で前記段差を乗り越える低速乗り越え制御と、の何れかの踏み間違い防止制御を行う、ことを含む処理を実行する。
【0008】
第3態様に係る車両制御プログラムは、少なくとも1つのプロセッサに、車両の車輪が接触している段差の高さを推定し、前記段差の高さに応じて、前記段差を乗り越えないように制限する乗り越え制限制御と、所定速度以下で前記段差を乗り越える低速乗り越え制御と、の何れかの踏み間違い防止制御を行う、ことを含む処理を実行させる。
【発明の効果】
【0009】
本開示によれば、踏み間違い防止制御を行う場合に車両の挙動が不安定となるのを抑制することができる、という効果を有する。
【図面の簡単な説明】
【0010】
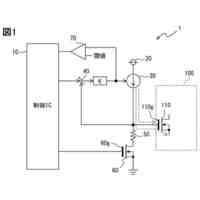
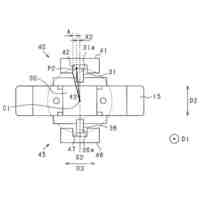
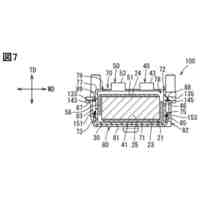
車両の構成の模式図である。
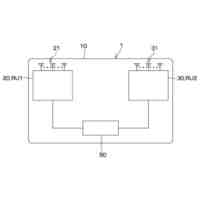
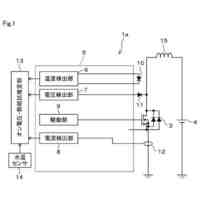
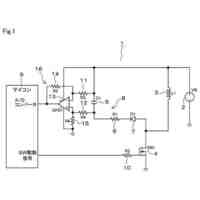
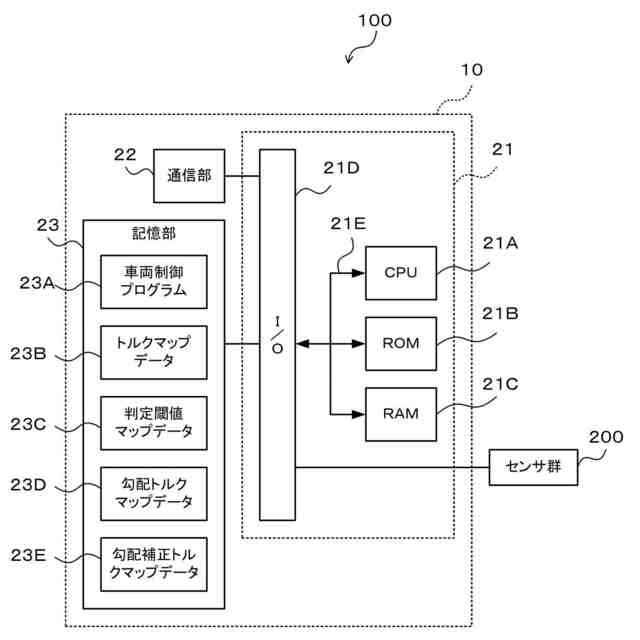
車両制御装置のハードウエア構成を示すブロック図である。
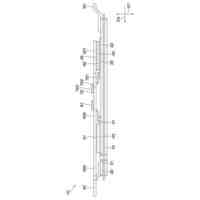
センサ群の構成を示す図である。
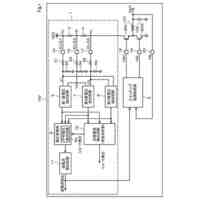
車両制御装置の機能構成を示すブロック図である。
段差乗り越え制御のフローチャートである。
トルク選択処理のフローチャートである。
踏み間違い防止制御の許可判定処理のフローチャートである。
踏み間違い防止制御の許可判定処理のフローチャートである。
判定閾値マップデータについて説明するための図である。
段差推定処理のフローチャートである。
車輪が段差に接触した状態を示す図である。
車輪の回転中心軸の軌跡を示すグラフである。
軌跡角度を示すグラフである。
片輪、両輪乗り上げ判定処理のフローチャートである。
踏み間違い防止処理のフローチャートである。
乗り越え制限制御のフローチャートである。
車速、段差高さ、及び段差乗り越え制御の関係示す図である。
監視安全制御処理のフローチャートである。
監視安全制御処理のフローチャートである。
勾配補正トルクマップデータについて説明するための図である。
変形例に係る監視安全制御処理のフローチャートである。
変形例に係るトルク選択処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
回転子
17日前
株式会社デンソー
変調器
10日前
株式会社デンソー
電子装置
17日前
株式会社デンソー
生体電極
3日前
株式会社デンソー
駆動回路
11日前
株式会社デンソー
光学部材
23日前
株式会社デンソー
整流回路
4日前
株式会社デンソー
光学部材
18日前
株式会社デンソー
レーダ装置
5日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
慣性センサ
17日前
株式会社デンソー
輻射ヒータ
17日前
株式会社デンソー
電磁継電器
3日前
株式会社デンソー
半導体装置
17日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
電力変換器
23日前
株式会社デンソー
電磁継電器
17日前
株式会社デンソー
半導体装置
12日前
株式会社デンソー
異常検出装置
10日前
株式会社デンソー
血流促進装置
10日前
株式会社デンソー
電力変換装置
17日前
株式会社デンソー
電力変換装置
17日前
株式会社デンソー
負荷駆動装置
12日前
株式会社デンソー
コンデンサ装置
10日前
株式会社デンソーウェーブ
コードスキャナ
23日前
株式会社デンソー
コンデンサ装置
17日前
株式会社デンソー
ガスセンサ素子
17日前
株式会社デンソー
車両用空調装置
17日前
株式会社デンソー
電流値算出装置
24日前
株式会社デンソー
車両用表示装置
3日前
株式会社デンソーウェーブ
情報読取システム
3日前
株式会社デンソー
回転電機制御装置
12日前
株式会社デンソー
アンテナデバイス
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ