TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024178816
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023097245
出願日
2023-06-13
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G06T
7/70 20170101AFI20241218BHJP(計算;計数)
要約
【課題】移動する撮像装置の位置及び姿勢を適切に決定する技術を提供する。
【解決手段】複数の第一の撮像装置の撮像により取得された画像に基づいて生成される三次元形状データに基づく画像と、前記複数の第一の撮像装置の撮像中に移動して撮像する第二の撮像装置が撮像する画像と、に基づいて、第二の撮像装置の位置及び姿勢を決定する。
【選択図】 図1
特許請求の範囲
【請求項1】
複数の第一の撮像装置の撮像により取得された画像に基づいて生成される三次元形状データを取得する第一の取得手段と、
前記複数の第一の撮像装置の撮像中に移動して撮像する第二の撮像装置が撮像する画像を取得する第二の取得手段と、
前記三次元形状データに基づく画像と、前記第二の撮像装置が撮像する画像と、に基づいて、前記第二の撮像装置の位置及び姿勢を決定する決定手段と、を有する情報処理装置。
続きを表示(約 970 文字)
【請求項2】
前記決定手段は、予め取得された前記第二の撮像装置の位置及び姿勢に応じた投影面に前記三次元形状データを投影することにより前記三次元形状データに基づく画像を生成し、
前記三次元形状データに基づく画像と、前記第二の撮像装置が撮像する画像と、に基づいて、前記第二の撮像装置の位置及び姿勢を決定する請求項1に記載の情報処理装置。
【請求項3】
前記決定手段は、前記三次元形状データに基づく画像の画像特徴と、前記第二の撮像装置が撮像する画像の画像特徴とに基づいて、前記第二の撮像装置の位置及び姿勢を決定する請求項1に記載の情報処理装置。
【請求項4】
前記決定手段は、前記三次元形状データに基づく画像に含まれる被写体のエッジ特徴と、前記第二の撮像装置が撮像する画像に含まれる前記被写体のエッジ特徴とに基づいて、前記第二の撮像装置の位置及び姿勢を決定する請求項1に記載の情報処理装置。
【請求項5】
前記決定手段は、前記エッジ特徴どうしの距離がより小さくなるように前記第二の撮像装置の位置及び姿勢を決定する請求項4に記載の情報処理装置。
【請求項6】
前記被写体は、静止している構造物である請求項4に記載の情報処理装置。
【請求項7】
前記決定手段は、前記三次元形状データに基づく画像に含まれる画素と、前記第二の撮像装置が撮像する画像のエッジ領域を除いた画像に含まれる画素の色との差に基づいて、前記第二の撮像装置の位置及び姿勢を決定する請求項1に記載の情報処理装置。
【請求項8】
前記決定手段により決定された前記第二の撮像装置の位置及び姿勢に基づいて、前記三次元形状データを更新する更新手段を有する請求項1に記載の情報処理装置。
【請求項9】
前記複数の第一の撮像装置と、前記第二の撮像装置とは同期して撮像を行う請求項1に記載の情報処理装置。
【請求項10】
前記決定手段は、前記第二の撮像装置が撮像する画像と、前記三次元形状データに基づく画像とに基づいて、前記第二の撮像装置の位置及び姿勢に対応する画像を生成する請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、制御方法及びプログラムに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
昨今、それぞれ異なる位置に設置された複数の撮像装置が同期して撮像を行い、当該撮像に基づいて得られる複数の画像を用いて仮想視点画像を生成するボリュメトリック技術が注目されている。仮想視点画像の画質向上の目的から、被写体を至近距離から移動するカメラ(以下、移動カメラという)で撮像した画像を用いて画像を合成する需要がある。
【0003】
一方、特許文献1で記載されているように、一般的なボリュメトリック技術では、複数の撮像装置の位置や姿勢を校正するカメラキャリブレーションを実施する。
【先行技術文献】
【特許文献】
【0004】
特開2017-212592号公報
特開2010-079452号公報
【非特許文献】
【0005】
J. Engel, V. Koltun, D. Cremers, “Direct Sparse Odometry” Submitted on 9 Jul 2016 (v1), last revised 7 Oct 2016 (this version, v2) [令和 5 年6 月2 日検索],インターネット <URL: https://arxiv.org/abs/1607.02565>
【発明の概要】
【発明が解決しようとする課題】
【0006】
空間内を動く移動カメラで撮像した画像と仮想視点画像とがシームレスに切り替わるような演出をするためには、移動カメラの位置や姿勢を毎フレームキャリブレーションすることやセンサーで取得することが必要である。しかしキャリブレーションに必要なマーカーを配置できない撮像環境の制約、あるいはセンサー精度が不十分であるなどの点から上記のような演出は困難であった。
【0007】
本開示の目的は、移動する撮像装置の位置及び姿勢を適切に決定する技術を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本開示にかかる情報処理装置は、例えば以下の構成を有する。すなわち、複数の第一の撮像装置の撮像により取得された画像に基づいて生成される三次元形状データを取得する第一の取得手段と、前記複数の第一の撮像装置の撮像中に移動して撮像する第二の撮像装置が撮像する画像を取得する第二の取得手段と、前記三次元形状データに基づく画像と、前記第二の撮像装置が撮像する画像と、に基づいて、前記第二の撮像装置の位置及び姿勢を決定する決定手段を有する。
【発明の効果】
【0009】
本開示によれば、移動する撮像装置の位置及び姿勢を適切に決定することが可能となる。
【図面の簡単な説明】
【0010】
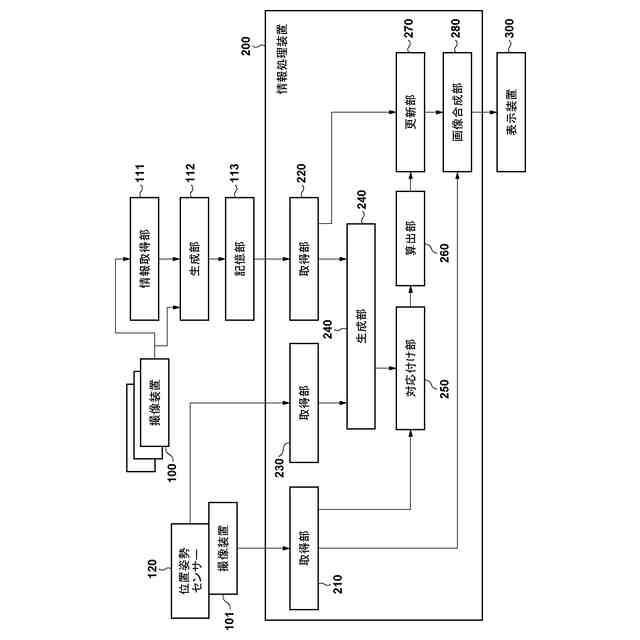
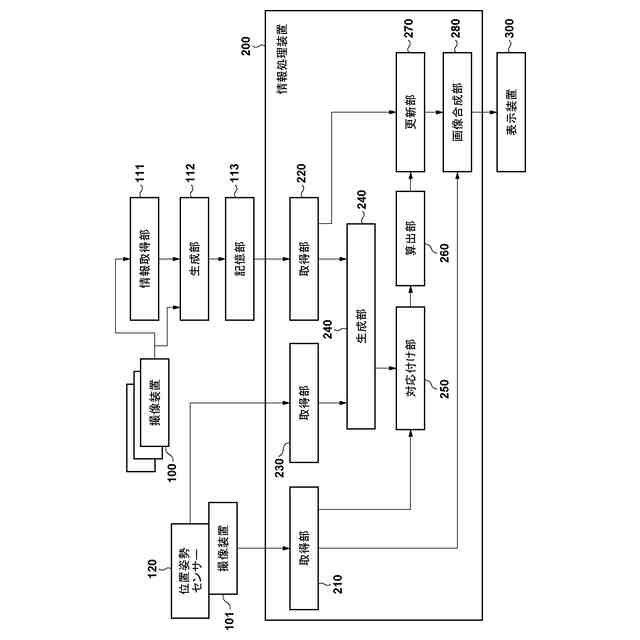
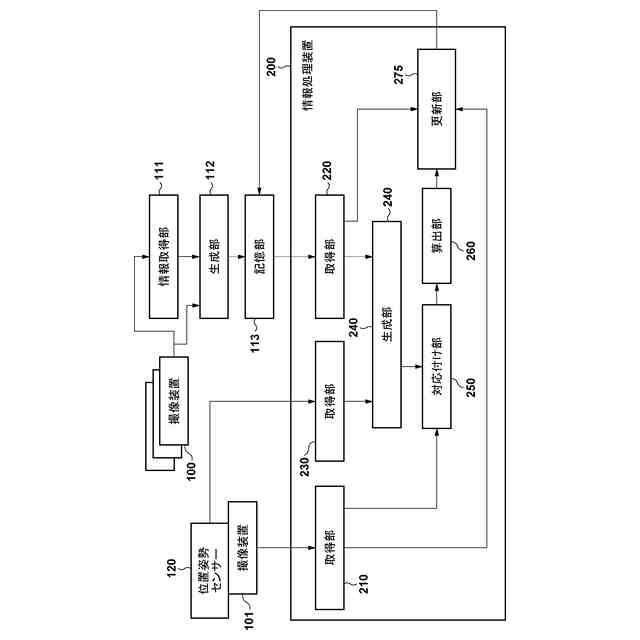
実施形態1におけるシステム構成図を示す。
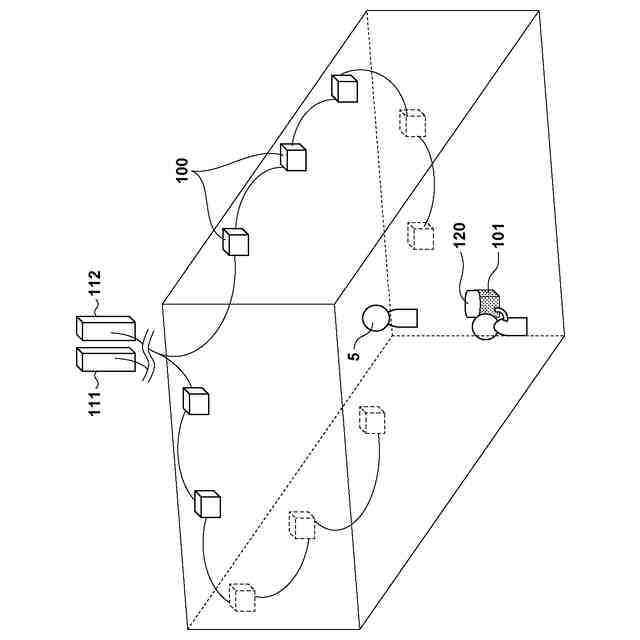
実施形態1における撮像する空間の模式図を示す。
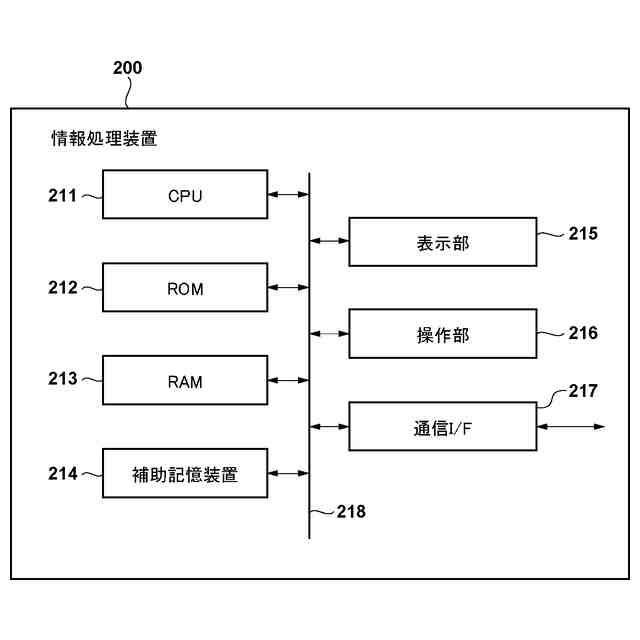
実施形態1における情報処理装置のハードウェア構成図を示す。
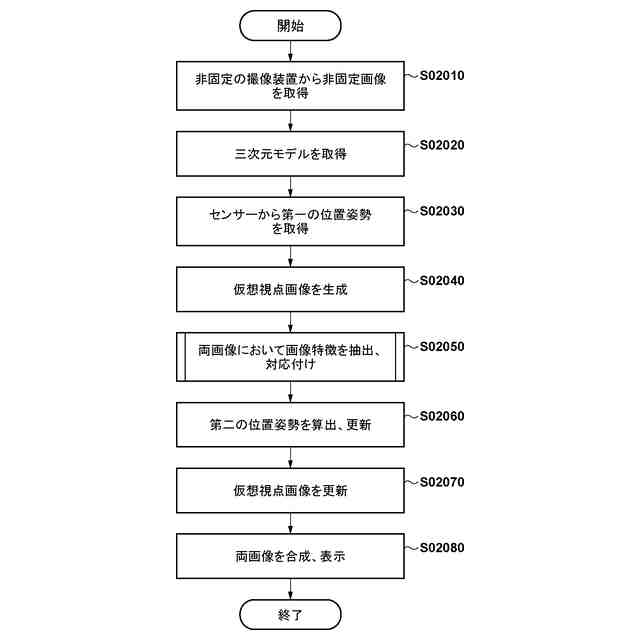
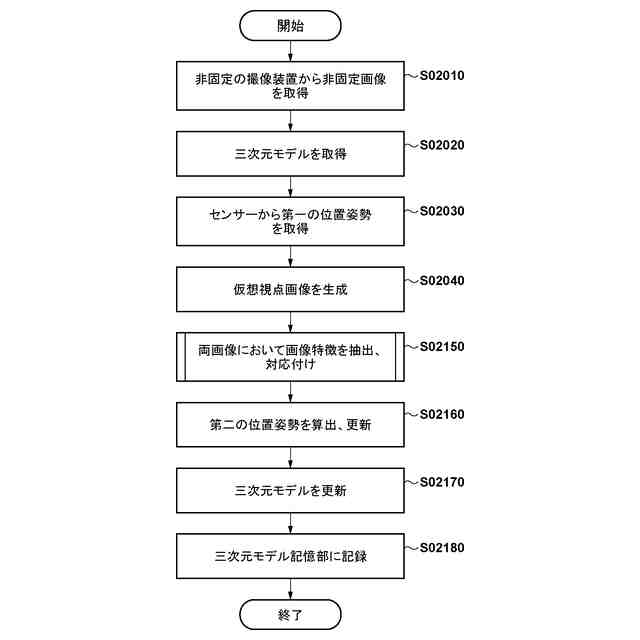
実施形態1における情報処理装置の処理フローを示す。
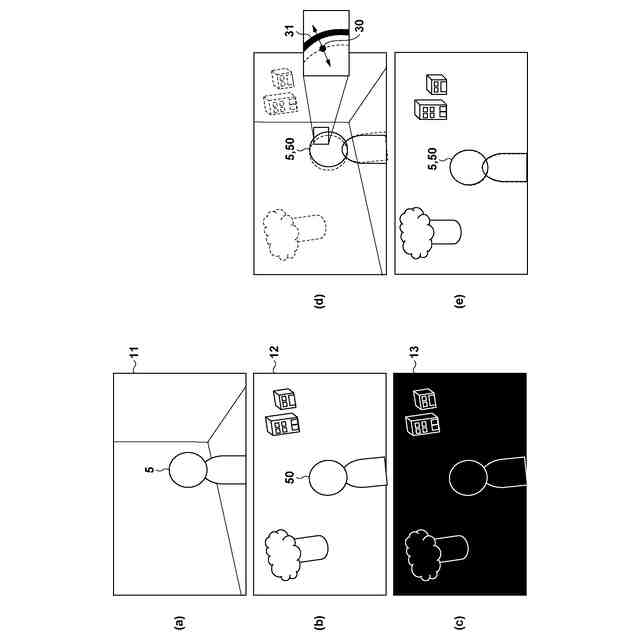
実施形態1における画像合成の過程を示す。
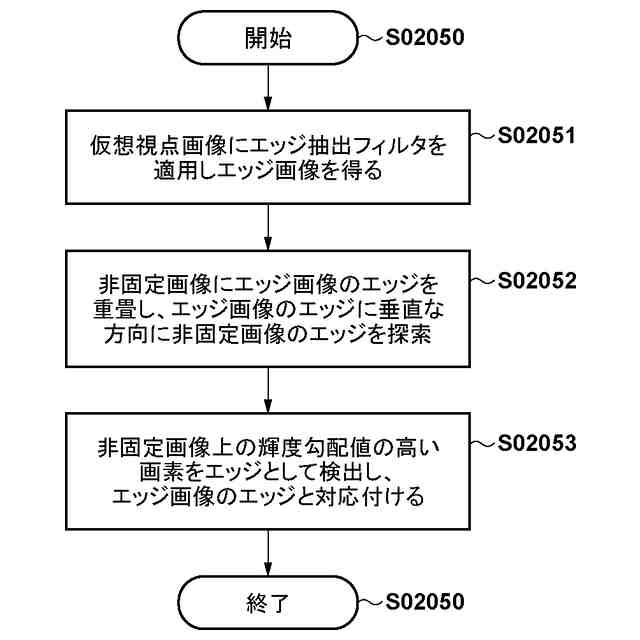
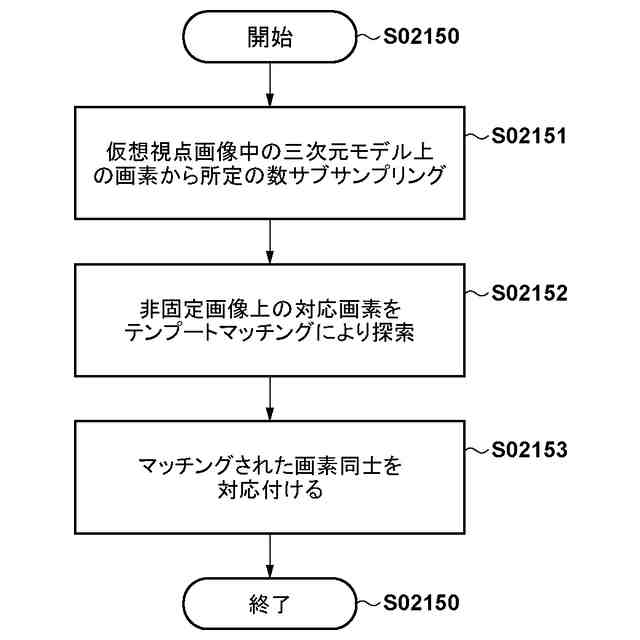
実施形態1における画像特徴の抽出および対応付けのフローを示す。
実施形態2におけるシステム構成図を示す。
実施形態2における情報処理装置の処理フローを示す。
実施形態2における画像特徴の抽出および対応付けのフローを示す。
実施形態3におけるシステム構成図を示す。
実施形態3における情報処理装置の処理フローを示す。
実施形態3における画像合成の過程を示す。
実施形態3における画像特徴の抽出および対応付けのフローを示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ