TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152541
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023079941
出願日
2023-05-15
発明の名称
個人化の下肢リハビリテーション歩行パターンの生成装置及び制御方法
出願人
浙江大学
,
ZHEJIANG UNIVERSITY
代理人
個人
主分類
A61H
1/02 20060101AFI20241018BHJP(医学または獣医学;衛生学)
要約
【課題】個人に応じた下肢リハビリテーション歩行パターンの生成装置及び制御方法を提供する。
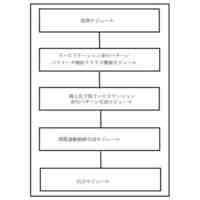
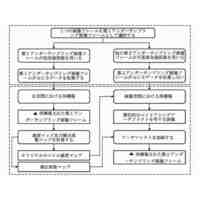
【解決手段】装置は、下肢リハビリテーション外骨格と、シングルチップマシンと、を備え、シングルチップマシンは、下肢リハビリテーション外骨格に取付けられて利用者の脚に装着される。方法は、測定歩行パターン特性パラメータを取得するステップと、ZMP法により初期の運動軌跡を取得するステップと、下肢リハビリテーション外骨格に入力するステップと、自然言語評価を嗜好クラウド構築モジュールに入力するステップと、リハビリテーション歩行パターンパラメータ嗜好クラウドを取得して歩行パターン生成モジュールに出力するステップと、個人化された歩行パターンパラメータを関節運動軌跡生成モジュールに出力して最終的な運動軌跡を下肢リハビリテーション外骨格に出力して作動させることにより装置の制御を達成するステップと、を備える。
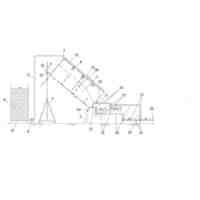
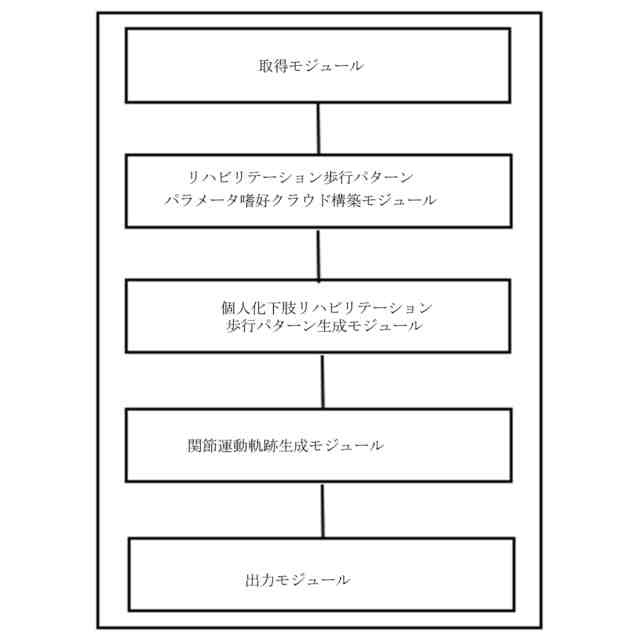
【選択図】図3
特許請求の範囲
【請求項1】
個人に応じた下肢リハビリテーション歩行パターンの生成装置であって、
下肢リハビリテーション外骨格と、
取得モジュール、リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュール、個人化下肢リハビリテーション歩行パターン生成モジュール、関節運動軌跡生成モジュール及び出力モジュールが取付けられるシングルチップマシンと、
を備え、
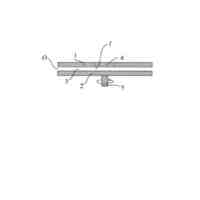
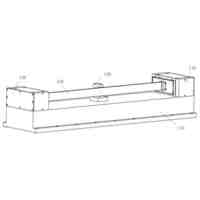
シングルチップマシンは、コントローラとして下肢リハビリテーション外骨格に取付けられて電気的に接続され、
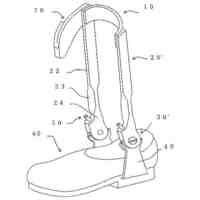
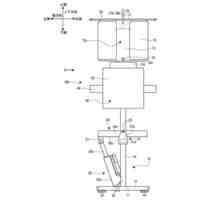
下肢リハビリテーション外骨格は、利用者の脚に装着される、
ことを特徴とする個人に応じた下肢リハビリテーション歩行パターンの生成装置。
続きを表示(約 4,300 文字)
【請求項2】
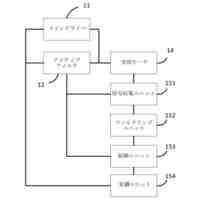
前記取得モジュールは、利用者の自然言語評価データを取得してリハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールに入力し、
リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールは、処理後に、リハビリテーション歩行パターンパラメータ嗜好クラウドを個人化下肢リハビリテーション歩行パターン生成モジュールに出力し、
個人化下肢リハビリテーション歩行パターン生成モジュールは、処理後に、個人化歩行パターンパラメータを関節運動軌跡生成モジュールに出力し、
関節運動軌跡生成モジュールは、処理後に、最終的な下肢リハビリテーション外骨格の関節運動軌跡を出力し、出力モジュールを介して下肢リハビリテーション外骨格に出力して制御する、
ことを特徴とする請求項1に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置。
【請求項3】
請求項1または2に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法であって、
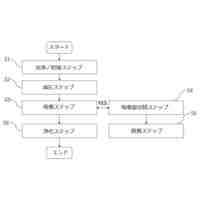
下肢リハビリテーション外骨格を利用者の脚に装着し、基準歩行パターン特性パラメータに基づき測定歩行パターン特性パラメータを取得するステップS1と、
測定歩行パターン特性パラメータに基づき、ゼロモーメントポイントプレビュー制御ZMP法により、初期の下肢リハビリテーション外骨格の関節運動軌跡を取得するステップS2と、
初期の下肢リハビリテーション外骨格の関節運動軌跡を下肢リハビリテーション外骨格に入力し、下肢リハビリテーション外骨格により初期の下肢リハビリテーション外骨格の関節運動軌跡に基づき、2つの予め定めた歩行パターン周期で利用者を歩行させるステップS3と、
利用者は、歩行パターン性能指標の自然言語評価データを、コントローラの取得モジュール、ないし、リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールに入力するステップS4と、
リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールは、自然言語評価データに基づき評価行列を生成し、評価行列に基づきリハビリテーション歩行パターンパラメータ嗜好クラウドを取得して個人化下肢リハビリテーション歩行パターン生成モジュールに出力し、個人化下肢リハビリテーション歩行パターン生成モジュールは、個人化歩行パターンパラメータを関節運動軌跡生成モジュールに出力し、関節運動軌跡生成モジュールは、最終的な下肢リハビリテーション外骨格の関節運動軌跡を出力し、出力モジュールを介して下肢リハビリテーション外骨格に出力して制御するステップS5と、
最終的な下肢リハビリテーション外骨格の関節運動軌跡に基づき下肢リハビリテーション外骨格を作動させることにより、個人に応じた下肢リハビリテーション歩行パターン生成装置の制御を達成するステップS6と、
を備える、
ことを特徴とする個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項4】
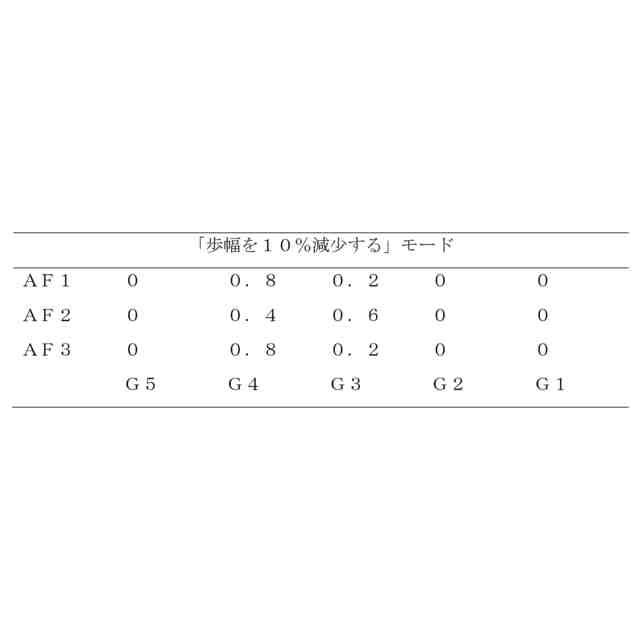
前記ステップS1において、前記予め定めた基準歩行パターン特性パラメータは、基準歩幅、基準歩隔及び基準歩行周波数を含み、測定歩行パターン特性パラメータは、基準歩行パターン特性パラメータを調整し、具体的に、基準歩幅を、10%減少し、5%減少し、5%増加し、または10%増加し、基準歩隔を、10%減少し、5%減少し、5%増加し、または10%増加し、基準歩行周波数を、10%減少し、5%減少、5%増加し、または10%増加することにより取得される、
ことを特徴とする請求項3に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項5】
前記ステップS2において、前記初期の下肢リハビリテーション外骨格の関節運動軌跡は、初期の左膝関節の運動軌跡、初期の右膝関節の運動軌跡、初期の左股関節の運動軌跡、及び初期の右股関節の運動軌跡を含む、
ことを特徴とする請求項3に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項6】
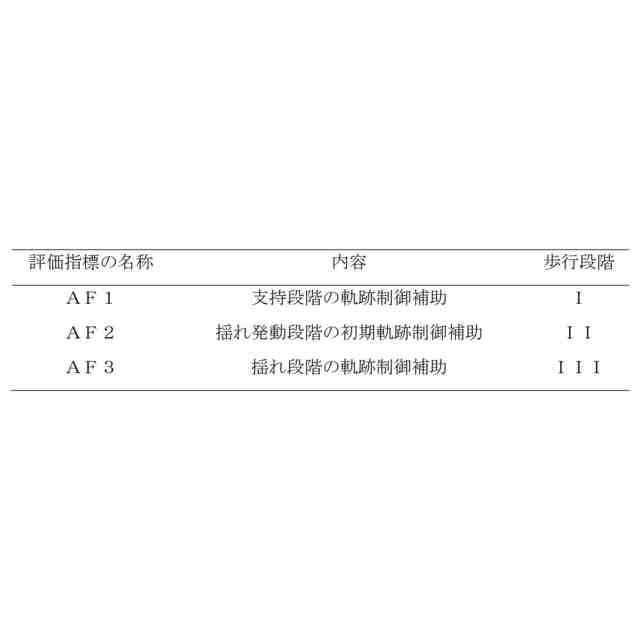
前記ステップS4において、歩行パターン性能指標は、支持段階の軌跡制御補助度AF1、揺れ発動段階の初期軌跡制御補助度AF2、及び揺れ段階の軌跡制御補助度AF3を含み、ただし、
支持段階は、具体的に、利用者が下肢リハビリテーション外骨格を用いる際に、予め定めた歩行パターン周期における立上り期間の初期から終期までの段階であり、
揺れ発動段階は、具体的に、利用者が下肢リハビリテーション外骨格を用いる際に、予め定めた歩行パターン周期における立上り期間の終期から揺れ期間の初期までの段階であり、
揺れ段階は、具体的に、利用者が下肢リハビリテーション外骨格を用いる際に、予め定めた歩行パターン周期における揺れ期間の初期から終期までの段階である、
ことを特徴とする請求項3に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項7】
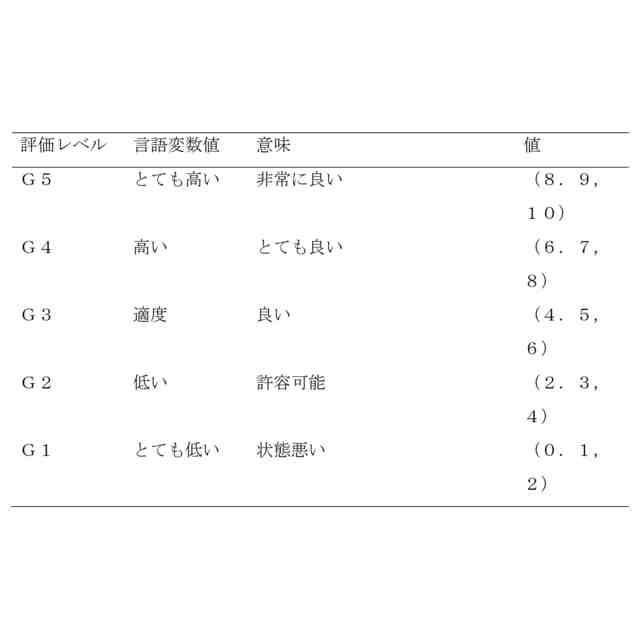
前記ステップS4において、自然言語評価データは、具体的に、G5:とても高い、G4:高い、G3:適度、G2:低い、G1:とても低いという5つの評価レベルを含み、
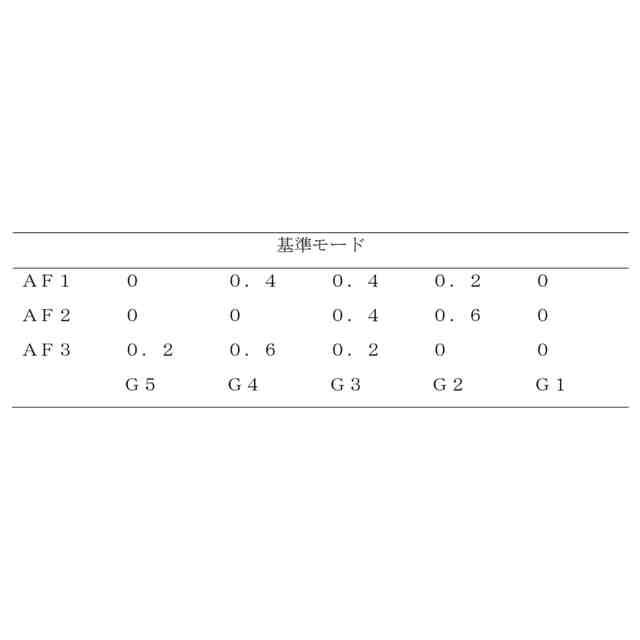
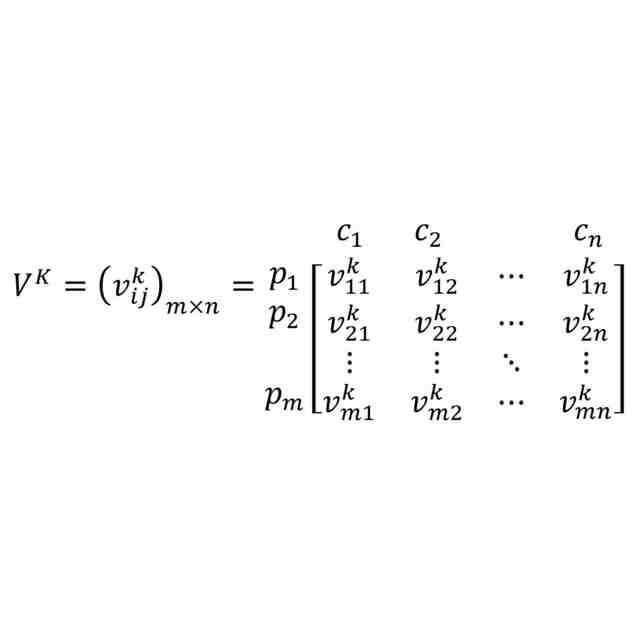
利用者は、支持段階の軌跡制御補助度AF1の自然言語評価データにおける各評価レベル、揺れ発動段階の初期軌跡制御補助度AF2の自然言語評価データにおける各評価レベル、及び揺れ段階の軌跡制御補助度AF3の自然言語評価データにおける各評価レベルに対して、予め定めたスコア値の範囲内にスコアリングを行い、スコアリングされたスコア値をコントローラの取得モジュールに、ないしリハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールに入力して評価行列として構築し、ただし、
評価行列には、支持段階の軌跡制御補助度AF1、揺れ発動段階の初期軌跡制御補助度AF2、及び揺れ段階の軌跡制御補助度AF3の自然言語評価データにおける各評価レベルのスコア値が含まれ、
支持段階の軌跡制御補助度AF1の自然言語評価データにおける各評価レベルのスコア値の合計、揺れ発動段階の初期軌跡制御補助度AF2の自然言語評価データにおける各評価レベルのスコア値の合計、及び揺れ段階の軌跡制御補助度AF3の自然言語評価データにおける各評価レベルのスコア値の合計は、何れも1である、
ことを特徴とする請求項6に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項8】
前記ステップS5において、評価行列に基づきリハビリテーション歩行パターンパラメータ嗜好クラウドを取得するのは、具体的に、
リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールが、評価行列における支持段階の軌跡制御補助度AF1、揺れ発動段階の初期軌跡制御補助度AF2、及び揺れ段階の軌跡制御補助度AF3の自然言語評価データにおける各評価レベルのスコア値を抽出するステップS5.1と、
リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールが、支持段階の軌跡制御補助度AF1の自然言語評価データにおける各評価レベルのスコア値、揺れ発動段階の初期軌跡制御補助度AF2の自然言語評価データにおける各評価レベルのスコア値、及び揺れ段階の軌跡制御補助度AF3の自然言語評価データにおける各評価レベルのスコア値を、それぞれ、バックワードクラウドジェネレーターに入力し、バックワードクラウドジェネレーターが、支持段階、揺れ発動段階、及び揺れ段階のクラウドモデルを出力するステップS5.2と、
リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールが、クラウド集約演算子を取出し、ステップS5.1における各スコア値、及びステップS5.2における各クラウドモデルに基づき、リハビリテーション歩行パターンパラメータ嗜好クラウドを集約して生成するステップS5.3と、
を備える、
ことを特徴とする請求項7に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項9】
前記ステップS5において、リハビリテーション歩行パターンパラメータ嗜好クラウドが個人化下肢リハビリテーション歩行パターン生成モジュールに入力されて個人化下肢リハビリテーション歩行パターン生成モジュールが個人化歩行パターンパラメータを出力するのは、具体的に、個人化下肢リハビリテーション歩行パターン生成モジュールが、リハビリテーション歩行パターンパラメータ嗜好クラウドをフォーワードクラウドジェネレーターに入力し、フォーワードクラウドジェネレーターが、個人化下肢リハビリテーション歩行パターンの歩幅と歩隔と歩行周波数との数値の含む個人化歩行パターンパラメータを出力することである、
ことを特徴とする請求項3に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
【請求項10】
前記ステップS5において、個人化歩行パターンパラメータが関節運動軌跡生成モジュールに出力されて関節運動軌跡生成モジュールが最終的な下肢リハビリテーション外骨格の関節運動軌跡を出力するのは、具体的に、関節運動軌跡生成モジュールが、個人化歩行パターンパラメータに基づき、ZMP法により、最終的な左膝関節運動軌跡と、最終的な右膝関節運動軌跡と、最終的な左股関節運動軌跡と、最終的な右股関節運動軌跡との含む最終的な下肢リハビリテーション外骨格の関節運動軌跡を取得することである、
ことを特徴とする請求項3に記載の個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、リハビリテーション歩行パターンの生成装置に関し、具体的に、個人化の下肢リハビリテーション歩行パターンの生成装置及び制御方法に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、下肢の外骨格は、人間の運動補助に広く用いられる。下肢の外骨格の運動基準軌跡は予め設定された値であるが、予め設定された歩行パターンのタイプは、ダイナミクス特性及び訓練内容の個人差により、各利用者の要求を十分に満たさない。したがって、利用者の好みを満たすためには、下肢の外骨格補助の歩行パターンの生成方法を最適化させて各利用者に適する最適な歩行パターンを見つける必要がある。
【0003】
下肢機能障害の患者は、下肢の筋力が不足しており、下肢の運動機能が健常者よりも弱いため、下肢リハビリテーション外骨格に対して健常者の歩行パターンによりリハビリテーション訓練を行えず、患者自身の身体状況及び回復程度に応じて個人化の歩行速度及び歩幅などを設計する必要がある。これにより、人体が下肢リハビリテーション外骨格を装着して歩行する歩行パターンでは、各関節の実際の運動学・ダイナミクス特性に近づき、下肢リハビリテーション外骨格を装着者と協働させて自己適応自発リハビリテーション訓練を完了させる。利用者は、認知機能の違いにより、歩行パターンの性能を明確的な数値で定量的に評価しにくいため、利用者の個人化の好みを満たす下肢リハビリテーション歩行パターンが確立できず、実際のリハビリテーション訓練における下肢リハビリテーションの促進・利用が極めて大きく制限される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、背景技術に記載の課題を解決するために、下肢リハビリテーション歩行パターンの正確な定量的評価と、利用者の好みを満たす下肢リハビリテーションの個人に応じた歩行パターンの予測とを実現し、患者の安全・効果的なリハビリテーション訓練が補助され、肢体の運動機能が改善・回復される、個人化された下肢リハビリテーション歩行パターンの生成装置及び制御方法を提供する。
【課題を解決するための手段】
【0005】
本発明に係る技術案は、
(一)個人に応じた下肢リハビリテーション歩行パターンの生成装置であって、
【0006】
下肢リハビリテーション外骨格と、
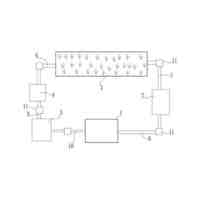
取得モジュール、リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュール、個人化下肢リハビリテーション歩行パターン生成モジュール、関節運動軌跡生成モジュール及び出力モジュールが備えられたSTM32f103RCT6型のシングルチップマシン(Single Chip Machine)と、を備え、
シングルチップマシンは、コントローラとして下肢リハビリテーション外骨格に取り付けられて電気的に接続され、下肢リハビリテーション外骨格は、利用者の脚に装着される、個人に応じた下肢リハビリテーション歩行パターンの生成装置である。
【0007】
前記取得モジュールは、利用者の自然言語評価データを取得してリハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールに入力し、リハビリテーション歩行パターンパラメータ嗜好クラウド構築モジュールは、処理後に、リハビリテーション歩行パターンパラメータ嗜好クラウドを個人に応じた下肢リハビリテーション歩行パターン生成モジュールに出力し、個人に応じた下肢リハビリテーション歩行パターン生成モジュールは、処理後に、個人に応じた歩行パターンパラメータを関節運動軌跡生成モジュールに出力し、関節運動軌跡生成モジュールは、処理後に、最終的な下肢リハビリテーション外骨格の関節運動軌跡を出力し、出力モジュールを介して下肢リハビリテーション外骨格に出力して制御する。
【0008】
(二)個人に応じた下肢リハビリテーション歩行パターンの生成装置による下肢リハビリテーション歩行パターン生成の制御方法は、以下のステップを含む。
S1:下肢リハビリテーション外骨格を利用者の脚に装着し、基準歩行パターン特性パラメータに基づきテスト歩行パターン特性パラメータを取得する。
【0009】
ただし、利用者の身長、体重、下肢長、膝幅、足首幅、足長及び足幅が含まれる利用者人体特性パラメータに基づき基準歩行パターン特性パラメータを取得する。
【0010】
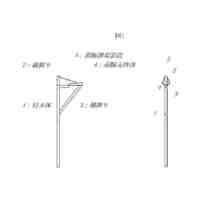
S2:テスト歩行パターン特性パラメータに基づき、ゼロモーメントポイントプレビュー制御ZMP法(Zero Moment Point Preview Control ZMP Method)により、初期の下肢リハビリテーション外骨格の関節運動軌跡を取得する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
浙江大学
水平軸方向角振動装置
10か月前
浙江大学
可変粘性流れ抵抗構造
7か月前
浙江大学
超狭線幅レーザ発生装置
7か月前
浙江大学
斜面土壌体浸透係数モニタリング方法とシステム
1か月前
浙江大学
SNP分子で標識されたHu羊純血種の評価方法
3か月前
浙江大学
超臨界ウェーハ洗浄/乾燥媒体回収方法及びシステム
2か月前
浙江大学
氷点下の温度に基づく多孔質炭素電極の凍結転写方法
2か月前
浙江大学
降雨型地滑りモニタリング・早期警報方法とシステム
1か月前
浙江大学
ベース歪み発生装置およびベース歪み感度計測システム
8か月前
浙江大学
地下水水位標高の測定方法、貯水量測定システム及び応用
3か月前
浙江大学
マルチインバータ駆動交流モータの給電における高調波の制御装置
3か月前
浙江大学濱江研究院
高強度のシルクフィブロインヒドロゲル人工腱/人工靭帯の製造方法
5か月前
浙江大学
個人化の下肢リハビリテーション歩行パターンの生成装置及び制御方法
10か月前
浙江大学
下肢リハビリテーション訓練用の外骨格の歩行パラメータの最適化方法
10か月前
浙江大学
高鉄含有量の非晶質ナノ結晶軟磁性合金を調製するための過冷却凝固法
11か月前
浙江大学
複数の変数を同期的にモニタリングする地滑りモデル試験方法及び装置
7か月前
浙江大学
4Dプリントに基づく迷路状インターロックスマート構造及びそのロック方法
7か月前
浙江大学
全周回転型非接触電力伝送コネクタ装置及びこれに基づく電気エネルギー伝送方法
1か月前
杭州師範大学
水質を改善するための人文生態浄化システムおよび方法
3か月前
浙江大学
マルチノズルアレイによって勾配孔隙マクロポーラスゼラチンを3D印刷する装置及び方法
4か月前
浙江大学嘉興研究院
メタノール改質と高効率な膜分離との連結に基づくコンパクト型船舶用炭素回収のシステム、方法及び応用
7か月前
浙江大学
k空間と画像空間とを組み合わせて再構築するイメージング方法及び装置
23日前
湖北万潤新能源科技股フン有限公司
ナトリウム電池用正極材料及びその製造方法
11か月前
個人
健康器具
6か月前
個人
鼾防止用具
6か月前
個人
短下肢装具
1か月前
個人
洗井間専家。
5か月前
個人
導電香
7か月前
個人
マッサージ機
7か月前
個人
嚥下鍛錬装置
2か月前
個人
白内障治療法
5か月前
個人
脈波測定方法
6か月前
個人
前腕誘導装置
1か月前
個人
脈波測定方法
6か月前
個人
矯正椅子
3か月前
個人
胸骨圧迫補助具
今日
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ