TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024131809
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042281
出願日
2023-03-16
発明の名称
制御装置及び制御方法
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H02P
21/26 20160101AFI20240920BHJP(電力の発電,変換,配電)
要約
【課題】位置センサレスベクトル制御において、目標回転速度に基づき回転子の位置を推定しつつ、制御の安定性を向上する。
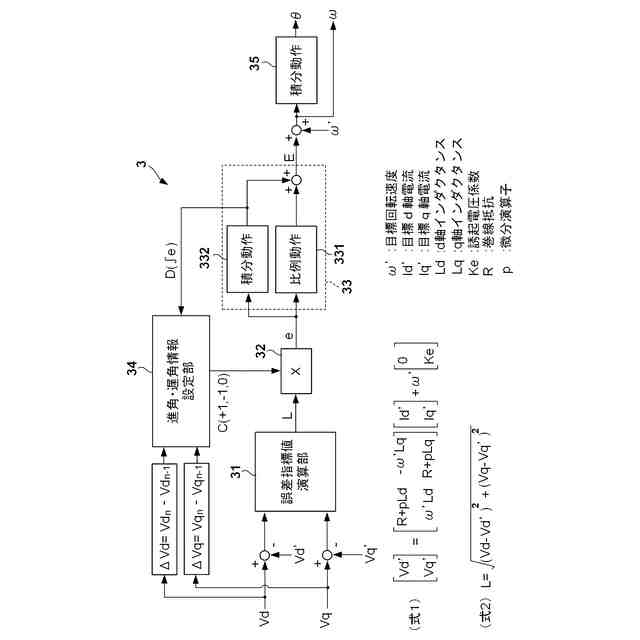
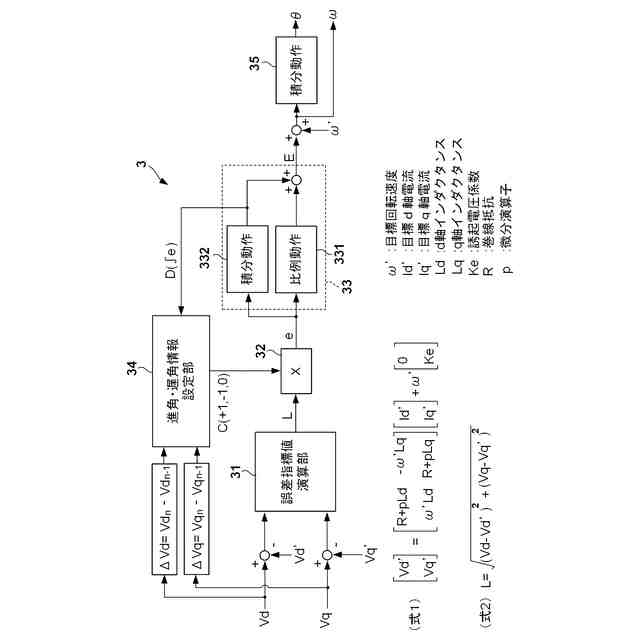
【解決手段】同期電動機の回転子の位置を推定する推定手段と、前記推定手段の推定結果に基づき前記同期電動機をベクトル制御するベクトル制御手段とを備え、前記推定手段は、目標回転速度と誤差修正値とに基づいて推定し、前記誤差修正値は前記同期電動機の電圧方程式に基づく理論d軸電圧及び理論q軸電圧と制御d軸電圧及び制御q軸電圧との各差分から導出される値に、前記回転子の進角・遅角の調整方向を示す進角・遅角情報を付与した基本値から導出され、前記進角・遅角情報は、前記制御q軸電圧の増減と、今回の制御周期よりも前の少なくとも一つの制御周期で導出された前記基本値とに基づいて設定される。
【選択図】図3
特許請求の範囲
【請求項1】
位置センサレスベクトル制御により同期電動機を制御する制御装置であって、
前記同期電動機の回転子の位置を推定する推定手段と、
前記推定手段の推定結果に基づき前記同期電動機をベクトル制御するベクトル制御手段と、を備え、
前記推定手段は、
前記同期電動機の目標回転速度と、誤差修正値とに基づいて前記回転子の位置を推定し、
前記誤差修正値は、
前記同期電動機の電圧方程式に前記目標回転速度、及び、d軸及びq軸の各目標電流を代入して得た理論d軸電圧及び理論q軸電圧と、前記ベクトル制御手段により導出された制御d軸電圧及び制御q軸電圧との各差分から導出される値に、前記回転子の進角・遅角の調整方向を示す進角・遅角情報を付与した基本値から導出され、
前記進角・遅角情報は、
前記制御q軸電圧の増減と、今回の制御周期よりも前の少なくとも一つの制御周期で導出された前記基本値とに基づいて設定される、
ことを特徴とする制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記進角・遅角情報は、前記制御q軸電圧の増減と、今回の制御周期よりも前の複数の制御周期で導出された前記基本値の積分値とに基づいて設定される、
ことを特徴とする制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記誤差修正値は、前記基本値に対する比例・積分動作によって導出された値である、
ことを特徴とする制御装置。
【請求項4】
請求項3に記載の制御装置であって、
前記進角・遅角情報は、前記制御q軸電圧の増減と、前記比例・積分動作における積分動作により導出された値とに基づいて設定される、
ことを特徴とする制御装置。
【請求項5】
請求項1に記載の制御装置であって、
前記理論d軸電圧と前記制御d軸電圧との差分が閾値以下の場合であり、かつ、前記理論q軸電圧と前記制御q軸電圧との差分が閾値以下の場合は、前記基本値を0とする、
ことを特徴とする制御装置。
【請求項6】
請求項1に記載の制御装置であって、
前記推定手段は、前記目標回転速度と前記誤差修正値との合算値の積分値を前記回転子の位置と推定する、
ことを特徴とする制御装置。
【請求項7】
請求項1に記載の制御装置であって、
d軸の目標電流は0に設定される、
ことを特徴とする制御装置。
【請求項8】
位置センサレスベクトル制御により同期電動機を制御する制御方法であって、
前記同期電動機の回転子の位置を推定する推定工程と、
前記推定工程の推定結果に基づき前記同期電動機をベクトル制御するベクトル制御工程と、を備え
前記推定工程では、
前記同期電動機の目標回転速度と、誤差修正値とに基づいて前記回転子の位置を推定し、
前記誤差修正値は、
前記同期電動機の電圧方程式に前記目標回転速度、及び、d軸及びq軸の各目標電流を代入して得た理論d軸電圧及び理論q軸電圧と、前記ベクトル制御工程により導出された制御d軸電圧及び制御q軸電圧との各差分から導出される値に、前記回転子の進角・遅角の調整方向を示す進角・遅角情報を付与した基本値から導出され、
前記進角・遅角情報は、
前記制御q軸電圧の増減と、今回の制御周期よりも前の少なくとも一つの制御周期で導出された前記基本値とに基づいて設定される、
ことを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は位置センサレスベクトル制御技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
同期電動機の位置センサレスベクトル制御において、回転子の位置(位相)を推定する様々な方法が提案されている。例えば、電動機に印加する電圧に高周波電圧をサーチ電圧として重畳し、電動機の電流挙動を観測して回転子の位置を推定する方法が提案されている。しかし、この方法はトルク振動や騒音の点で不利である。また、電動機の誘起電圧を演算して回転子の位置を推定する方法が提案されている。しかし、この方法では誘起電圧の低い低回転域で推定精度が低下する点で不利である。また、電動機の目標回転速度から回転子の位置を推定する方法が提案されている(例えば特許文献1)。この方法では、電動機が目標回転速度どおりに制御されていると仮定し、目標回転速度の積分値が回転子の位置と推定される。
【先行技術文献】
【特許文献】
【0003】
特許第3637897号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電動機の目標回転速度から回転子の位置を推定する方法は、サーチ電圧を重畳する方法に対して、トルク振動や騒音の点で有利である。また、誘起電圧を演算する方法に対しては、低回転域での推定精度の点で有利である。しかし、電動機が目標回転速度どおりに制御されていると仮定しているため、回転子の推定位置と実位置とにずれがあると制御の安定性が低下する場合がある。
【0005】
本発明の目的は、電動機の目標回転速度に基づき回転子の位置を推定しつつ、制御の安定性を向上することにある。
【課題を解決するための手段】
【0006】
本発明によれば、
位置センサレスベクトル制御により同期電動機を制御する制御装置であって、
前記同期電動機の回転子の位置を推定する推定手段と、
前記推定手段の推定結果に基づき前記同期電動機をベクトル制御するベクトル制御手段と、を備え、
前記推定手段は、
前記同期電動機の目標回転速度と、誤差修正値とに基づいて前記回転子の位置を推定し、
前記誤差修正値は、
前記同期電動機の電圧方程式に前記目標回転速度、及び、d軸及びq軸の各目標電流を代入して得た理論d軸電圧及び理論q軸電圧と、前記ベクトル制御手段により導出された制御d軸電圧及び制御q軸電圧との各差分から導出される値に、前記回転子の進角・遅角の調整方向を示す進角・遅角情報を付与した基本値から導出され、
前記進角・遅角情報は、
前記制御q軸電圧の増減と、今回の制御周期よりも前の少なくとも一つの制御周期で導出された前記基本値とに基づいて設定される、
ことを特徴とする制御装置が提供される。
【発明の効果】
【0007】
本発明によれば、電動機の目標回転速度に基づき回転子の位置を推定しつつ、制御の安定性を向上することができる。
【図面の簡単な説明】
【0008】
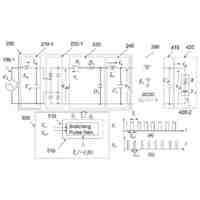
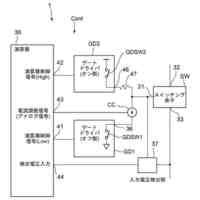
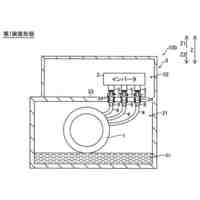
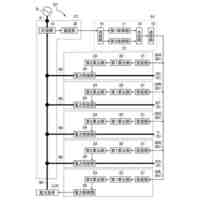
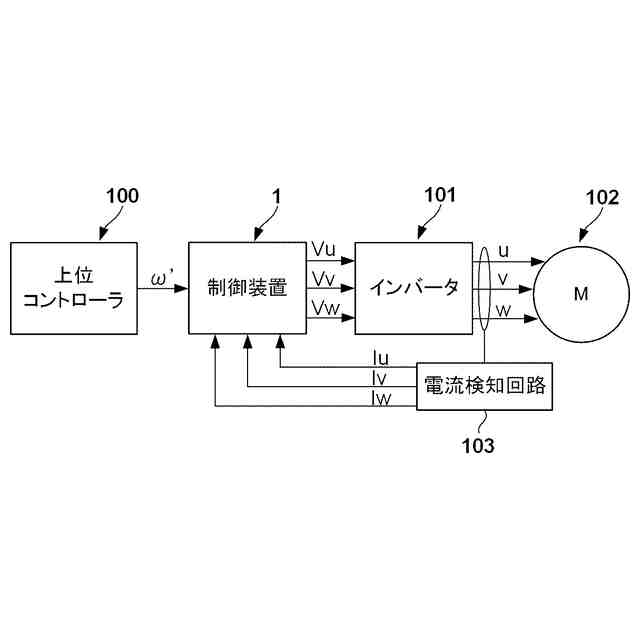
本発明の一実施形態に係る制御装置を用いた電動機の制御システムを示すブロック図。
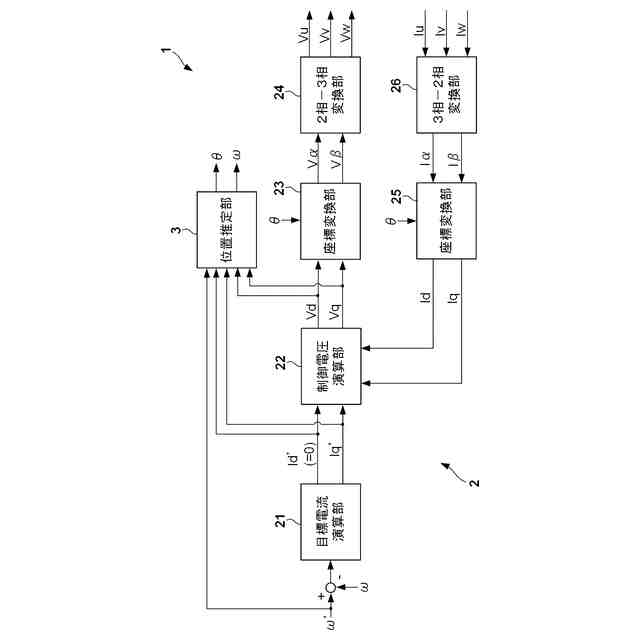
図1の制御装置の機能ブロック図。
位置推定部の機能ブロック図。
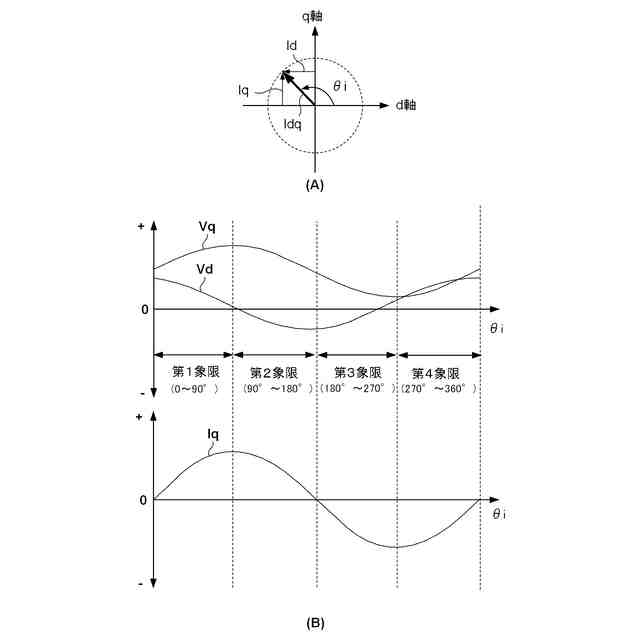
(A)は電流位相θiの説明図、(B)は電流θiに対するq軸電圧Vq、d軸電圧Vd及びq軸電流Iqの振幅変化を示す図。
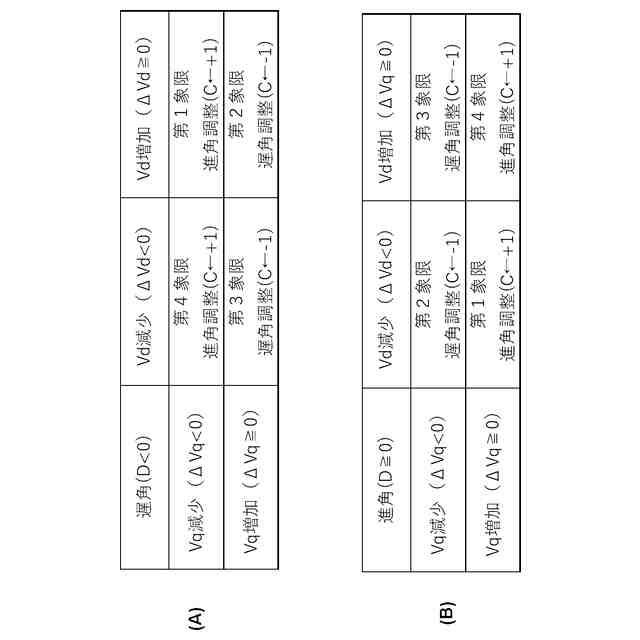
(A)及び(B)は進角・遅角情報の設定規則を示す図。
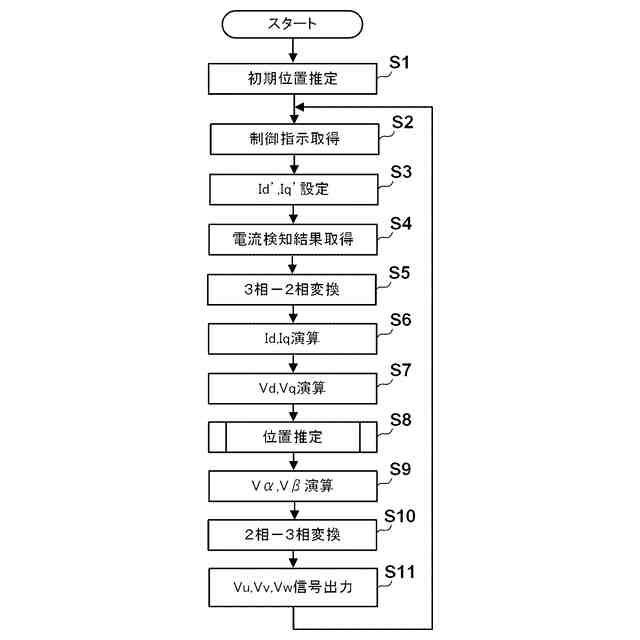
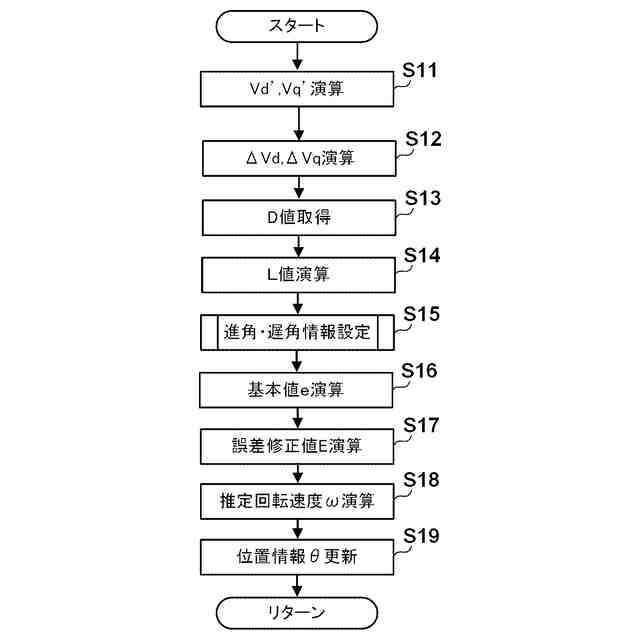
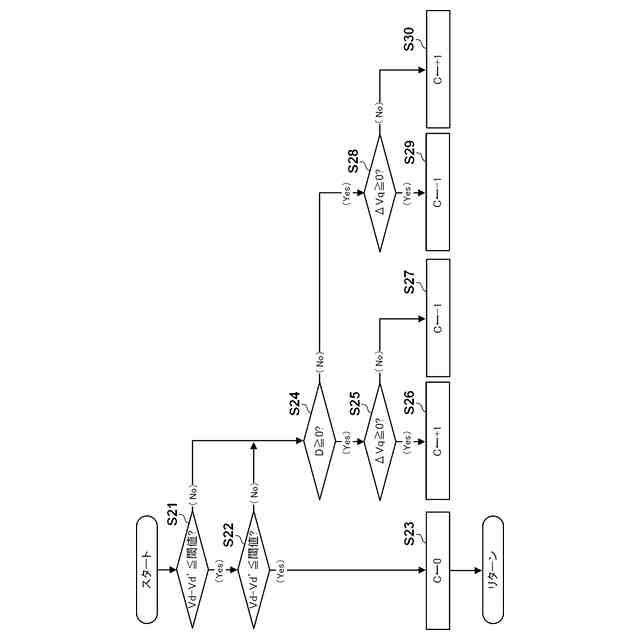
制御装置の処理例を示すフローチャート。
制御装置の処理例を示すフローチャート。
制御装置の処理例を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。尚、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴が任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
<システム>
図1は本発明の一実施形態に係る制御装置1を用いた電動機102の制御システムのブロック図である。電動機102は回転子に永久磁石を有する3相同期電動機であり、本実施形態の場合、特に同期電動機102として埋込磁石型モータ(IPMSM)の使用を想定している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ファラデー発電改良型
18日前
個人
共振形AC-DC電源
1日前
キヤノン電子株式会社
モータ
11日前
中国電力株式会社
梯子
1日前
個人
磁気浮上モーター
6日前
ニデック株式会社
モータ
22日前
株式会社ミクロブ
駆動装置
4日前
オムロン株式会社
保護装置
1日前
キヤノン株式会社
制御装置
11日前
トヨタ自動車株式会社
ロータ
12日前
ダイハツ工業株式会社
冷却装置
19日前
サンデン株式会社
電力変換装置
4日前
本田技研工業株式会社
回転電機
19日前
本田技研工業株式会社
回転電機
19日前
オムロン株式会社
フィルタ装置
4日前
ニデック株式会社
ステータ
19日前
ニデック株式会社
ステータ
19日前
株式会社アイシン
回転電機駆動装置
1日前
個人
引掛け金具付きソーラーパネル用架台
12日前
個人
多目的 プロペラコアモーター
5日前
株式会社豊田自動織機
ロータ
今日
アイシン高丘株式会社
ロータシャフト
7日前
株式会社ダイヘン
電力システム
1日前
富士電機株式会社
電力変換装置
4日前
株式会社ダイヘン
電力システム
19日前
ミネベアミツミ株式会社
モータ
7日前
日産自動車株式会社
インバータ
22日前
富士電機株式会社
電力変換装置
1日前
株式会社東芝
電力変換装置
19日前
住友電装株式会社
ワイヤハーネス
1日前
住友電装株式会社
ワイヤハーネス
今日
株式会社日立製作所
回転電機
7日前
株式会社豊田自動織機
電動圧縮機
22日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社関電工
配電設備工事方法
25日前
株式会社デンソー
電気部品
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ