TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120668
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023027634
出願日
2023-02-24
発明の名称
走行制御システム、走行制御装置、自律装置、走行制御方法、走行制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240829BHJP(制御;調整)
要約
【課題】複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な走行制御システム等を提供する。
【解決手段】走行制御システムは、プロセッサを有し、搬送物品を積載して自律走行可能な複数の自律装置の走行を制御する。プロセッサは、複数の自律装置に共通な共通走行エリアにおいて先行させる自律装置である先行装置により路面の凹凸状態を監視することを実行するように構成される。プロセッサは、共通走行エリアにおいて先行装置に後続させる自律装置である後続装置へ、先行装置により凹凸状態を監視した監視データを送信することを実行するように構成される。プロセッサは、監視データに応じた、自律装置の走行制限制御を含む制御パターンを、後続装置に付与することを実行するように構成される。
【選択図】図6
特許請求の範囲
【請求項1】
プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)の走行を制御する走行制御システムであって、
前記プロセッサは、
複数の前記自律装置に共通な共通走行エリアにおいて先行させる前記自律装置である先行装置により路面の凹凸状態を監視することと、
前記共通走行エリアにおいて前記先行装置に後続させる前記自律装置である後続装置へ、前記先行装置により前記凹凸状態を監視した監視データを送信することと、
前記監視データに応じた、前記自律装置の走行制限制御を含む制御パターンを、前記後続装置に付与することと、
を実行するように構成される走行制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記先行装置は、積載される前記搬送物品に関する物品条件に応じた前記走行制限制御の制限度合が最小と予測される前記自律装置である請求項1に記載の走行制御システム。
【請求項3】
前記先行装置は、前記共通走行エリアにおける走行予定範囲が最大の前記自律装置である請求項1に記載の走行制御システム。
【請求項4】
前記プロセッサは、
前記監視データに応じた前記走行制限制御を含む前記制御パターンを、前記先行装置にも付与することをさらに実行するように構成される請求項1に記載の走行制御システム。
【請求項5】
前記制御パターンを前記後続装置に付与することは、
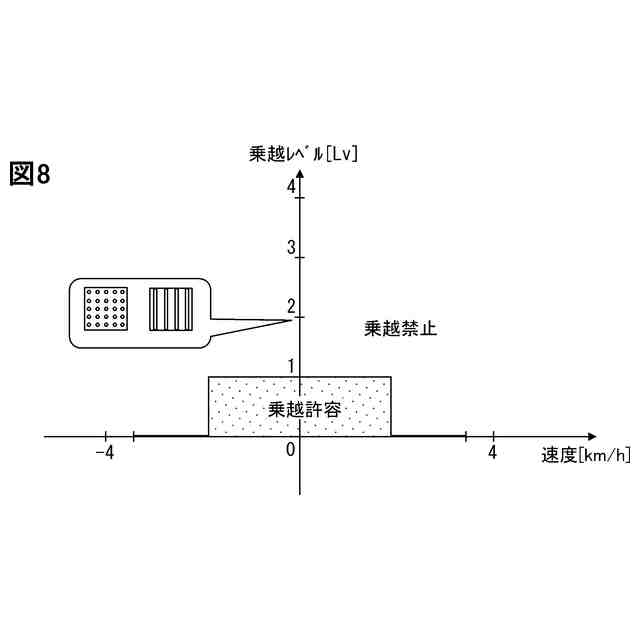
前記路面の凹凸度が前記搬送物品に関する物品条件に応じた許容凹凸度範囲外となる前記共通走行エリアでは、走行を禁止する前記制御パターンを前記後続装置へ付与することを含む請求項1に記載の走行制御システム。
【請求項6】
前記制御パターンを前記後続装置に付与することは、
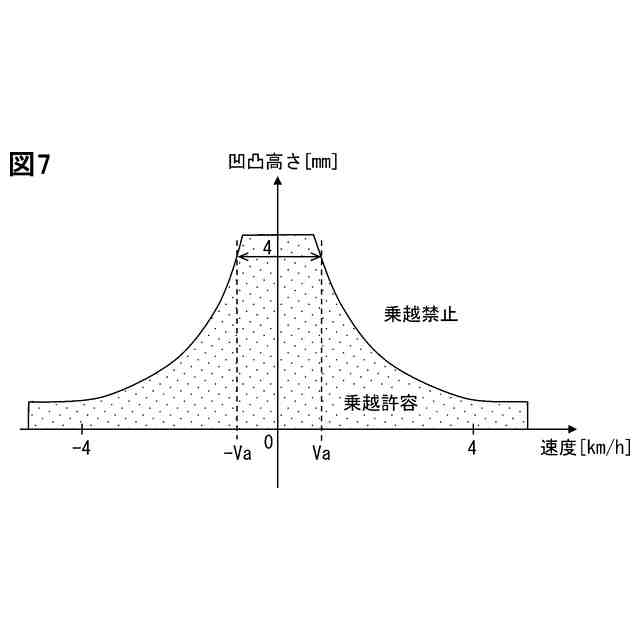
前記搬送物品に関する物品条件に応じて、前記路面の凹凸度が高いほど、許容速度範囲を制限する前記制御パターンを前記後続装置へ付与することを含む請求項1に記載の走行制御システム。
【請求項7】
前記制御パターンを前記後続装置に付与することは、
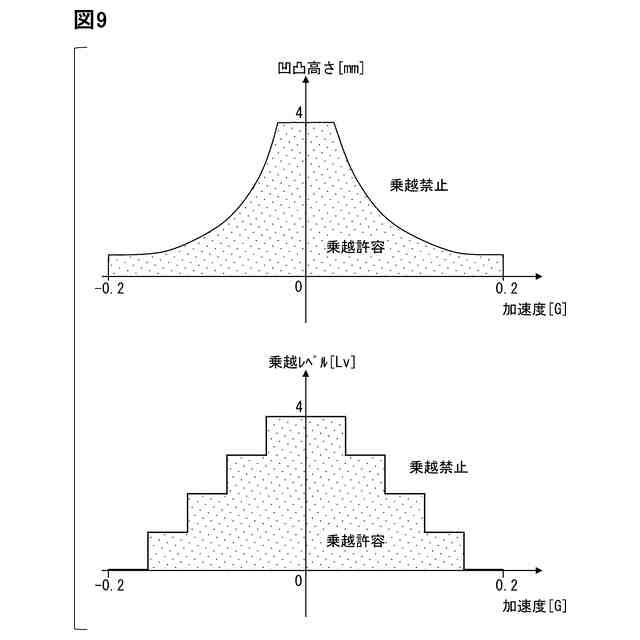
前記搬送物品に関する物品条件に応じて、前記路面の凹凸度が高いほど、許容加速度範囲を制限する前記制御パターンを前記後続装置へ付与することを含む請求項1に記載の走行制御システム。
【請求項8】
プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)のうち少なくとも1つのターゲット装置よりも共通走行エリアを先行するホスト装置を制御する走行制御システムであって、
前記プロセッサは、
前記ホスト装置により路面の凹凸状態を監視することと、
前記ターゲット装置へ送信される監視データを前記ホスト装置から出力することと、
を実行するように構成される走行制御システム。
【請求項9】
前記プロセッサは、
前記監視データに応じた走行制限制御を含む制御パターンを前記ホスト装置に付与することをさらに実行するように構成される請求項8に記載の走行制御システム。
【請求項10】
プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)のうちのターゲット装置に共通走行エリアにて後続するホスト装置を制御する走行制御システムであって、
前記プロセッサは、
前記ターゲット装置により監視された路面の凹凸状態に関する監視データを、前記ホスト装置にて受信することと、
前記監視データに応じた走行制限制御を含む制御パターンを、前記ホスト装置に付与することと、
を実行するように構成される走行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律装置の走行を制御する走行制御技術に、関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、複数の作業ステーション間の路面を走行する無人搬送車が開示されている。この無人搬送車は、路面の状態を検出するセンサが取り付けられたロボットを搭載している。無人搬送車は、センサにより検出された凹凸の深さ等の路面の状態に基づき、振動の振幅を所定の閾値以下にする走行速度により走行する。
【先行技術文献】
【特許文献】
【0003】
特許第7000378号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の無人搬送車は、単体での路面状態の検出及び走行制御を前提としている。複数の無人搬送車が共通するエリアを走行する場合に、こうした複数の車両を活用して搬送物品への影響を抑制する技術については、特許文献1に開示されていない。
【0005】
本開示の課題は、複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な走行制御システムを、提供することにある。本開示の別の課題は、複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な走行制御装置を、提供することにある。本開示の別の課題は、複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な自律装置を、提供することにある。本開示の又別の課題は、複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な走行制御方法を、提供することにある。本開示のさらに別の課題は、複数の自律装置を活用して搬送する物品に対する影響を抑制した走行が可能な走行制御プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)の走行を制御する走行制御システムであって、
プロセッサは、
複数の自律装置に共通な共通走行エリアにおいて先行させる自律装置である先行装置により路面の凹凸状態を監視することと、
共通走行エリアにおいて先行装置に後続させる自律装置である後続装置へ、先行装置により凹凸状態を監視した監視データを送信することと、
監視データに応じた、自律装置の走行制限制御を含む制御パターンを、後続装置に付与することと、
を実行するように構成される。
【0008】
本開示の第二態様は、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)の走行を制御するために、プロセッサ(102)により実行される走行制御方法であって、
複数の自律装置に共通な共通走行エリアにおいて先行させる自律装置である先行装置により路面の凹凸状態を監視することと、
共通走行エリアにおいて先行装置に後続させる自律装置である後続装置へ、先行装置により凹凸状態を監視した監視データを送信することと、
監視データに応じた、自律装置の走行制限制御を含む制御パターンを、後続装置に付与することと、
を含む。
【0009】
本開示の第三態様は、搬送物品(L)を積載して自律走行可能な複数の自律装置(1)の走行を制御するために記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含む走行制御プログラムであって、
命令は、
複数の自律装置に共通な共通走行エリアにおいて先行させる自律装置である先行装置により路面の凹凸状態を監視することと、
共通走行エリアにおいて先行装置に後続させる自律装置である後続装置へ、先行装置により凹凸状態を監視した監視データを送信することと、
監視データに応じた、自律装置の走行制限制御を含む制御パターンを、後続装置に付与することと、
を含む。
【0010】
これら第一~第三態様によると、先行装置により取得された監視データに応じた、走行制限制御を含む制御パターンが、後続装置に付与される。故に、複数の自律装置を活用して、自律装置の走行制限制御が実現され得る。したがって、搬送する物品に対する影響を抑制した走行が可能となり得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
14日前
株式会社デンソーエレクトロニクス
継電器
20日前
株式会社デンソー
送風機
27日前
株式会社デンソーエレクトロニクス
発音器
15日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
受電装置
15日前
株式会社デンソー
ステータ
5日前
株式会社デンソー
ステータ
5日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
回転電機
19日前
株式会社デンソー
空調装置
1か月前
株式会社デンソー
表示装置
5日前
株式会社デンソー
表示装置
5日前
株式会社デンソー
光学部材
5日前
株式会社デンソー
表示装置
25日前
株式会社デンソー
清掃装置
14日前
株式会社デンソー
回転電機
14日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
位相シフタ
27日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
光学センサ
29日前
株式会社デンソー
光測距装置
29日前
株式会社デンソー
ロータコア
12日前
株式会社デンソー
音声取得装置
18日前
株式会社デンソーウェーブ
認証システム
14日前
株式会社デンソー
電子制御装置
13日前
株式会社デンソー
電子制御装置
15日前
株式会社デンソー
噴射制御装置
29日前
株式会社デンソー
車両制御装置
14日前
株式会社デンソー
電力変換装置
19日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ