TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120667
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023027633
出願日
2023-02-24
発明の名称
走行制御システム、走行制御装置、自律装置、走行制御方法、走行制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240829BHJP(制御;調整)
要約
【課題】搬送する物品に対する影響を抑制した走行が可能な走行制御システム等を提供する。
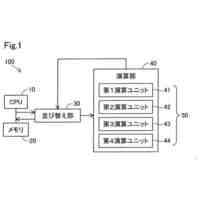
【解決手段】走行制御システムは、プロセッサを有し、搬送物品を積載して自律走行可能な自律装置の走行を制御する。プロセッサは、走行路面の凹凸状態に関する路面条件及び搬送物品に関する物品条件に応じた、自律装置の走行制限制御を含む制御パターンを、取得することを実行するように構成される。プロセッサは、制御パターンを自律装置に付与することを実行するように構成される。
【選択図】図4
特許請求の範囲
【請求項1】
プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な自律装置(1)の走行を制御する走行制御システムであって、
前記プロセッサは、
走行路面の凹凸状態に関する路面条件及び前記搬送物品に関する物品条件に応じた、前記自律装置の走行制限制御を含む制御パターンを、取得することと、
前記制御パターンを前記自律装置に付与することと、
を実行するように構成される走行制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御パターンを取得することは、
前記路面条件、前記物品条件、及び前記自律装置に関する装置条件に応じた、前記制御パターンを取得することを含む請求項1に記載の走行制御システム。
【請求項3】
前記制御パターンを取得することは、
前記搬送物品の少なくとも一部の固液状態を含む前記物品条件に応じた前記制御パターンを、取得することを含む請求項1に記載の走行制御システム。
【請求項4】
前記制御パターンを取得することは、
固体状の前記搬送物品の硬さを含む前記物品条件に応じた前記制御パターンを、取得することを含む請求項1に記載の走行制御システム。
【請求項5】
前記制御パターンを取得することは、
塑性変形が想定される範囲の前記硬さを有する固体状の前記搬送物品の姿勢を含む前記物品条件に応じた前記制御パターンを、取得することを含む請求項4に記載の走行制御システム。
【請求項6】
前記制御パターンを取得することは、
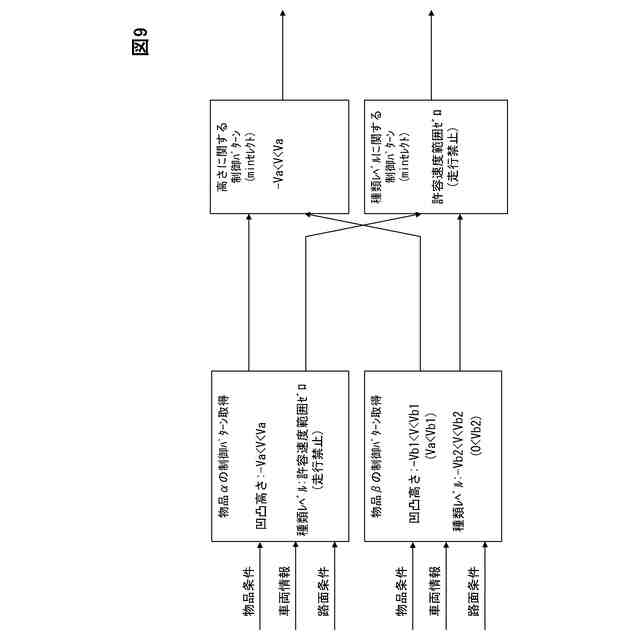
前記走行路面の凹凸度が前記物品条件に応じた許容凹凸度範囲に対して範囲外となる路面エリアでは、走行を禁止する前記制御パターンを取得することを含む請求項1に記載の走行制御システム。
【請求項7】
前記制御パターンを取得することは、
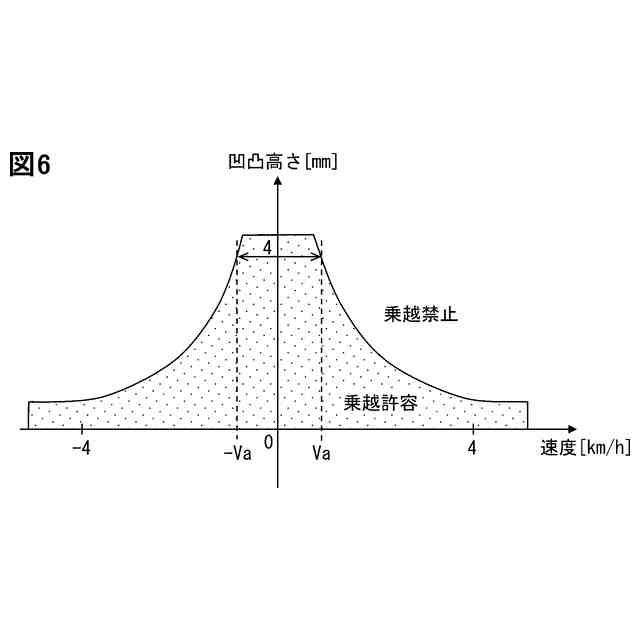
前記物品条件に応じて、前記走行路面の凹凸度が高いほど、許容速度範囲が制限された前記制御パターンを取得することを含む請求項1に記載の走行制御システム。
【請求項8】
前記制御パターンを取得することは、
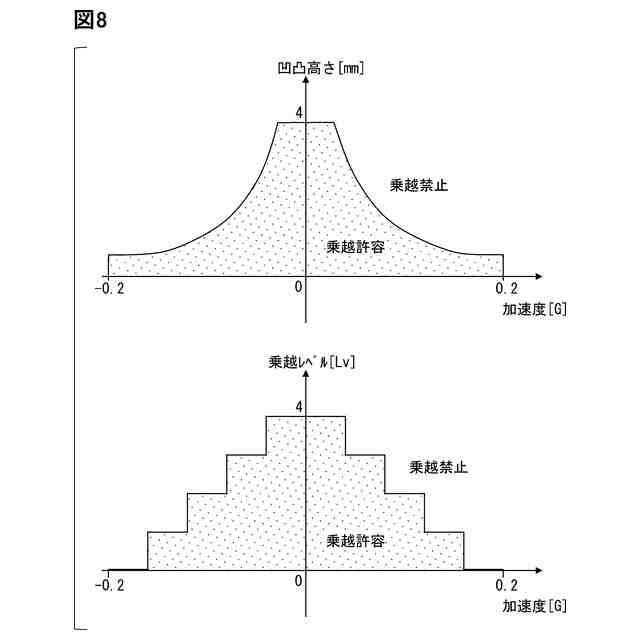
前記物品条件に応じて、前記走行路面の凹凸度が高いほど、許容加速度範囲が制限された前記制御パターンを取得することを含む請求項1に記載の走行制御システム。
【請求項9】
前記制御パターンを取得することは、
前記路面条件及び前記物品条件を取得することと、
前記路面条件及び前記物品条件に応じた前記制御パターンを出力可能な制限制御モデルにより、前記制御パターンを最適化することと、
を含む請求項1に記載の走行制御システム。
【請求項10】
プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な自律装置(1)に搭載可能に構成され、前記自律装置の走行を制御する走行制御装置であって、
前記プロセッサは、
走行路面の凹凸状態に関する路面条件及び前記搬送物品に関する物品条件に応じた、前記自律装置の走行制限制御を含む制御パターンを、取得することと、
前記制御パターンを前記自律装置に付与することと、
を実行するように構成される走行制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律装置の走行を制御する走行制御技術に、関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、複数の作業ステーション間の路面を走行する無人搬送車が開示されている。この無人搬送車は、路面の状態を検出するセンサが取り付けられたロボットを搭載している。無人搬送車は、センサにより検出された凹凸の深さ等の路面の状態に基づき、振動の振幅を所定の閾値以下にする走行速度により走行する。
【先行技術文献】
【特許文献】
【0003】
特許第7000378号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の無人搬送車は、走行による振動が搬送する物品に与える影響について考慮できていない。例えば、ケーキ等の柔らかい食品や飲み物等、搬送する物品によっては、転倒により変形したり零れたりする等、走行中の振動による影響が大きくなる虞がある。特許文献1の無人搬送車は、こうした搬送する物品に応じた走行について開示されていない。
【0005】
本開示の課題は、搬送する物品に対する影響を抑制した走行が可能な走行制御システムを、提供することにある。本開示の別の課題は、搬送する物品に対する影響を抑制した走行が可能な走行制御装置を、提供することにある。本開示の別の課題は、搬送する物品に対する影響を抑制した走行が可能な自律装置を、提供することにある。本開示の又別の課題は、搬送する物品に対する影響を抑制した走行が可能な走行制御方法を、提供することにある。本開示のさらに別の課題は、搬送する物品に対する影響を抑制した走行が可能な走行制御プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な自律装置(1)の走行を制御する走行制御システムであって、
プロセッサは、
走行路面の凹凸状態に関する路面条件及び搬送物品に関する物品条件に応じた、自律装置の走行制限制御を含む制御パターンを、取得することと、
制御パターンを自律装置に付与することと、
を実行するように構成される。
【0008】
本開示の第二態様は、プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な自律装置(1)に搭載可能に構成され、自律装置の走行を制御する走行制御装置であって、
プロセッサは、
走行路面の凹凸状態に関する路面条件及び搬送物品に関する物品条件に応じた、自律装置の走行制限制御を含む制御パターンを、取得することと、
制御パターンを自律装置に付与することと、
を実行するように構成される。
【0009】
本開示の第三態様は、プロセッサ(102)を有し、搬送物品(L)を積載して自律走行可能な自律装置であって、
プロセッサは、
走行路面の凹凸状態に関する路面条件及び搬送物品に関する物品条件に応じた、自律装置の走行制限制御を含む制御パターンを、取得することと、
制御パターンを自律装置に付与することと、
を実行するように構成される。
【0010】
本開示の第四態様は、搬送物品(L)を積載して自律走行可能な自律装置(1)の走行を制御するために、プロセッサ(102)により実行される走行制御方法であって、
走行路面の凹凸状態に関する路面条件及び搬送物品に関する物品条件に応じた、自律装置の走行制限制御を含む制御パターンを、取得することと、
制御パターンを自律装置に付与することと、
を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
ステータ
6日前
株式会社デンソーテン
表示装置
20日前
株式会社デンソー
測距装置
10日前
株式会社デンソー
通信装置
24日前
株式会社デンソー
送風装置
19日前
株式会社デンソー
圧電素子
10日前
株式会社デンソー
電気機器
10日前
株式会社デンソー
表示装置
17日前
株式会社デンソー
演算装置
6日前
株式会社デンソー
真空装置
20日前
株式会社デンソー
電力変換器
18日前
株式会社デンソー
半導体装置
17日前
株式会社デンソー
ガスケット
12日前
株式会社デンソー
電力変換器
6日前
株式会社デンソー
電力変換器
6日前
株式会社デンソー
半導体装置
6日前
株式会社デンソー
電力変換器
18日前
株式会社デンソー
蓄放熱材料
12日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
音低減装置
17日前
株式会社デンソー
運転支援装置
17日前
株式会社デンソー
電力変換装置
4日前
株式会社デンソー
燃料噴射装置
4日前
株式会社デンソー
流路形成装置
17日前
株式会社デンソー
物品昇降装置
24日前
株式会社デンソー
リニアモータ
20日前
株式会社デンソー
流路形成装置
17日前
株式会社デンソー
フィルタ装置
10日前
株式会社デンソー
車両用表示装置
17日前
株式会社デンソー
モータ制御装置
11日前
株式会社デンソー
車両用表示装置
19日前
株式会社デンソー
車両用空調装置
10日前
株式会社デンソー
フィルムヒータ
10日前
株式会社デンソー
半導体発光装置
6日前
株式会社デンソー
車両用表示装置
17日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ