TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110257
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014749
出願日
2023-02-02
発明の名称
栽培装置および栽培方法
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
A01G
31/04 20060101AFI20240807BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】栽培工程において保持具の共連れを抑えることが図れる栽培装置を提供する。
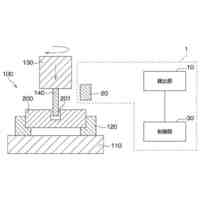
【解決手段】栽培装置は、搬送路110が延びる搬送方向に沿って一列に並んで配された複数の保持具20を搬送方向に移動可能に支持する搬送路110を備える。栽培装置は、保持具が搬送方向に移動することに応じて、保持具を係止する係止状態と保持具を係止しない非係止状態とにわたって切り換わる係止機構部30を備える。搬送路の一端12に位置する第1の保持具が移動することで、第2の保持具が第1の保持具寄りに共連れされて移動する。これに動きにより、係止機構部30は、非係止状態から、第2の保持具を係止する係止状態に切り換わる構成を有する。
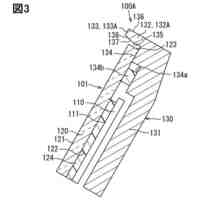
【選択図】図10
特許請求の範囲
【請求項1】
栽培対象である植物を保持可能な保持部(201)を有する保持具(20)と、
搬送路が延びる搬送方向に沿って一列に並んで配された複数の前記保持具を前記搬送方向に移動可能に支持する搬送路(110)と、
前記保持具が前記搬送方向に移動することに応じて、前記保持具を係止して前記保持具の移動を阻止する係止状態と前記保持具を係止しない非係止状態とにわたって切り換わる係止機構部(30,130)と、
を備え、
前記係止機構部は、前記非係止状態において、複数の前記保持具のうち、前記搬送路の一端(12)に位置する第1の保持具が移動することに伴い、前記第1の保持具に隣接する第2の保持具と前記第1の保持具との間隔が一旦広がった後、前記第2の保持具が前記第1の保持具寄りに共連れされて移動するタイミングで、前記非係止状態から、前記第2の保持具を係止する前記係止状態に切り換わる構成を有する栽培装置。
続きを表示(約 1,500 文字)
【請求項2】
前記係止機構部は、前記第2の保持具に隣接する第3の保持具が前記第2の保持具に接近する移動に伴い前記第3の保持具によって押し込まれて、前記第2の保持具を係止する前記係止状態から前記第2の保持具の係止を解除する前記非係止状態に切り換わる構成を有する請求項1に記載の栽培装置。
【請求項3】
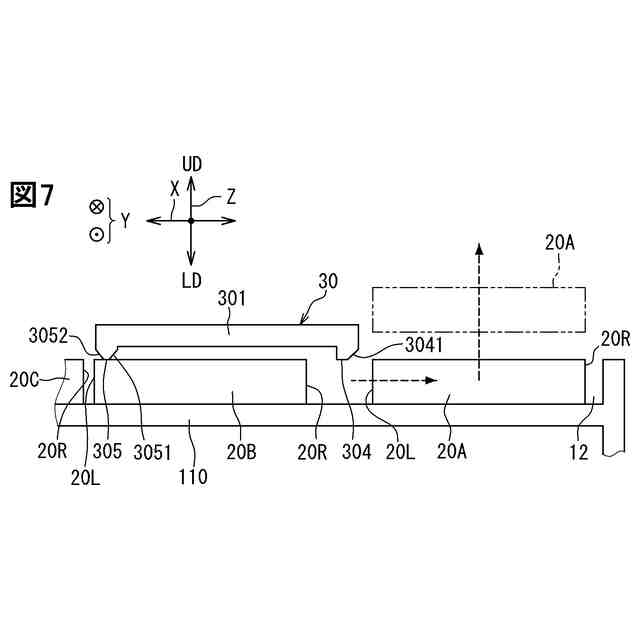
前記係止機構部は、基部(301)と、前記搬送方向において、前記基部の一端側に位置する第1の係止部(304)と前記基部の他端側に位置する第2の係止部(305)とを含み、
前記第1の係止部の内側面と前記第2の係止部の先端とは、前記保持具の前記搬送方向の長さよりも前記搬送方向に長く離間して設けられている請求項1または請求項2に記載の栽培装置。
【請求項4】
前記第1の係止部は、前記基部に対して前記保持具に向けて突出し前記搬送路の前記一端側の外面が先端に近づくほど前記搬送路の他端側に位置するように傾斜する面取り形状を有する爪部を含み、
前記第2の係止部は、前記基部に対して前記保持具に向けて突出し前記搬送路の一端側の外面と他端側の外面との両方において前記第2の係止部の先端に近づくほど先細りするように傾斜する面取り形状を有する爪部を含む請求項3に記載の栽培装置。
【請求項5】
前記第1の係止部は、前記第1の係止部よりも前記搬送路の前記一端側から前記第1の係止部に向けて搬送されてくる前記保持具を係止せず、前記第1の係止部よりも前記搬送路の他端側から前記第1の係止部に向けて搬送されてくる前記保持具を係止する構成を有し、
前記第2の係止部は、前記第2の係止部よりも前記搬送路の他端側から前記第2の係止部に向けて搬送されてくる前記保持具を係止せず、前記第2の係止部よりも前記搬送路の前記一端側から前記第2の係止部に向けて搬送されてくる前記保持具を係止しない構成を有する請求項3に記載の栽培装置。
【請求項6】
前記第1の係止部と前記第2の係止部は、非係止状態から係止状態へ重力方向にまたは付勢力方向に変位する請求項3に記載の栽培装置。
【請求項7】
前記係止機構部は、重力によって重力方向に摺動可能な状態で、支持されており、
前記第1の係止部と前記第2の係止部は、前記非係止状態において前記保持具の被係止部上端よりも上方に位置し、前記係止状態において前記保持具の被係止部上端よりも下方に位置する請求項6に記載の栽培装置。
【請求項8】
前記搬送路は、並走して設けられた第1の搬送路と第2の搬送路とを含んでおり、
前記第1の搬送路を移動可能である前記保持具に対して前記係止状態と前記非係止状態とにわたって切り換わる第1の係止機構部と、前記第2の搬送路を移動可能である前記保持具に対して前記係止状態と前記非係止状態とにわたって切り換わる第2の係止機構部とを一体に支持する単一の支持部材(40)を備える請求項1または請求項2に記載の栽培装置。
【請求項9】
前記搬送路の前記一端から前記第1の保持具を取り出す作業を行い、前記第2の保持具と前記第1の保持具との間隔が一旦広がった後、前記第2の保持具が前記第1の保持具寄りに共連れされて、前記第2の保持具を移動させるロボット装置(21,210)を備える請求項1に記載の栽培装置。
【請求項10】
前記搬送路の他端から前記保持具を搬入して、前記第3の保持具を前記搬送路の前記一端に向けて押し込むロボット装置(21,210)を備える請求項2に記載の栽培装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、保持具を搬出入する栽培装置および栽培方法に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1は、搬送路から保持具を取り出す際に、保持具に保持された植物の根が絡み合った場合でも、保持具の共連れを抑制できる係止機構を提案している。
【先行技術文献】
【特許文献】
【0003】
特許第6850441号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の装置は、弾性体によって得られる係止力に大きく依存する係止機構を有するため、係止機構の設定において制約が大きい。特許文献1に記載の技術は、保持具の共連れを抑制する点に関して、改善の余地がある。
【0005】
この明細書における開示の目的は、栽培工程において保持具の共連れを抑えることが図れる栽培装置および栽培方法を提供することである。
【課題を解決するための手段】
【0006】
この明細書に開示された複数の態様は、それぞれの目的を達成するために、互いに異なる技術的手段を採用する。また、特許請求の範囲およびこの項に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示す一例であって、技術的範囲を限定するものではない。
【0007】
開示された栽培装置の一つは、栽培対象である植物を保持可能な保持部(201)を有する保持具(20)と、搬送路が延びる搬送方向に沿って一列に並んで配された複数の保持具を搬送方向に移動可能に支持する搬送路(110)と、保持具が搬送方向に移動することに応じて、保持具を係止して保持具の移動を阻止する係止状態と保持具を係止しない非係止状態とにわたって切り換わる係止機構部(30,130)と、を備え、
係止機構部は、非係止状態において、複数の保持具のうち、搬送路の一端(12)に位置する第1の保持具が移動することに伴い、第1の保持具に隣接する第2の保持具と第1の保持具との間隔が一旦広がった後、第2の保持具が第1の保持具寄りに共連れされて移動するタイミングで、非係止状態から、第2の保持具を係止する係止状態に切り換わる構成を有する。
【0008】
この栽培装置によれば、第1の保持具が移動することに伴って、第1の保持具と第2の保持具の間隔が一旦広がる。ここで互いの根が絡まっている場合は、その根の絡まりが伸びきった時点で、第2の保持具は第1の保持具寄りに共連れされて移動していく。互いに根が絡まっていて第1の保持具と第2の保持具とが共連れ状態である場合には、例えば第1の保持具の搬出時に第2の保持具との間隔が一旦広がる。さらに第1の保持具が移動すると、根の絡まりが伸びきった状態において第2の保持具が共連れされることで第2の保持具が引っ張られて第1の保持具寄りに移動する。この第2の保持具の移動に伴い、係止機構部が第2の保持具を係止する状態に切り換わる。このように第1の保持具と第2の保持具とが共連れ状態であるときには、第1の保持具の搬出動作により、第2の保持具が係止されるので共連れ状態の進行を抑止できる。したがって、この栽培装置は、栽培工程において保持具の共連れを抑えることを図ることができる。
【0009】
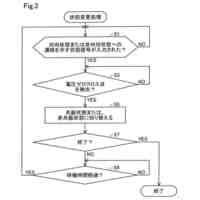
開示された栽培方法の一つは、ロボット装置(21,210)が、搬送路(110)が延びる搬送方向に沿って一列に並んで配された複数の保持具のうち、搬送路の一端(12)に位置する第1の保持具を搬送路から取り出すために第1の保持具を移動させる工程と、
さらに第1の保持具が移動することに伴い、第1の保持具に隣接する第2の保持具と第1の保持具との間隔が一旦広がった後、第2の保持具が第1の保持具寄りに共連れされて移動して、第2の保持具を係止しない非係止状態から、係止機構部(30,130)が第2の保持具を係止して第2の保持具の移動を阻止する係止状態に切り換わる工程と、
ロボット装置(21,210)が、搬送路の他端から保持具を搬入して、第2の保持具に隣接する第3の保持具を搬送路の一端に向けて押し込む工程と、
第3の保持具が第2の保持具に接近する移動に伴い第3の保持具によって押し込まれて、係止機構部が第2の保持具を係止する係止状態から第2の保持具の係止を解除する非係止状態に切り換わる工程と、
を備える。
【0010】
ロボット装置は第1の保持具を取り出す工程を行う。この工程の過程で、さらに第2の保持具と第1の保持具との間隔が広がった後、第2の保持具が第1の保持具に引っ張られることで第2の保持具が係止状態に切り換わる。この工程により、第2の保持具が係止されるので第1の保持具の搬出時に共連れ状態の進行を抑止できる。さらにロボット装置は、搬送路の他端から保持具を搬入して、第3の保持具を搬送路の一端に向けて押し込む。これにより、第3の保持具によって押し込まれて、係止機構部が第2の保持具を係止する係止状態から第2の保持具の係止を解除する非係止状態に切り換わる工程が行われる。これらの工程により、第1の保持具の搬出動作時に第2の保持具の共連れ状態を抑制し、さらに第2の保持具を係止状態から非係止状態に変更することができる。したがって、この栽培方法は、栽培工程において保持具の共連れを抑えることが図れるとともに、第2の保持具を搬出可能な状態にすることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
10日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
回転電機
10日前
株式会社デンソー
清掃装置
10日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
光学部材
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
ロータコア
8日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソーエレクトロニクス
電流遮断装置
1日前
株式会社デンソー
アクセル装置
4日前
株式会社デンソー
換気システム
1日前
株式会社デンソー
電子制御装置
9日前
株式会社デンソー
車両制御装置
10日前
株式会社デンソーエレクトロニクス
配電システム
9日前
株式会社デンソーウェーブ
認証システム
10日前
株式会社デンソー
電子制御装置
10日前
株式会社デンソー
車両用表示装置
11日前
株式会社デンソー
移動体制御装置
1日前
株式会社デンソー
レーザ加工装置
11日前
株式会社デンソー
非接触給電装置
1日前
株式会社デンソー
巻線界磁ロータ
11日前
株式会社デンソーウェーブ
三次元計測装置
8日前
株式会社デンソー
車両用表示装置
1日前
株式会社デンソー
半導体メモリ装置
1日前
株式会社デンソー
アンテナデバイス
9日前
株式会社デンソー
半導体装置の製造方法
7日前
株式会社デンソーウェーブ
無線タグ通信システム
7日前
株式会社デンソーウェーブ
RFタグ用のアンテナ
7日前
株式会社デンソー
光学センサ、製造方法
10日前
株式会社デンソー
工具異常検出システム
今日
株式会社デンソー
空燃比センサ制御装置
1日前
株式会社デンソー
半導体装置の製造方法
今日
株式会社デンソー
工具異常検出システム
今日
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ