TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024101697
公報種別
公開特許公報(A)
公開日
2024-07-30
出願番号
2023005758
出願日
2023-01-18
発明の名称
エンジン制御装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
F02D
45/00 20060101AFI20240723BHJP(燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備)
要約
【課題】角度クロック生成部が正常であることを保証するための技術を提供する。
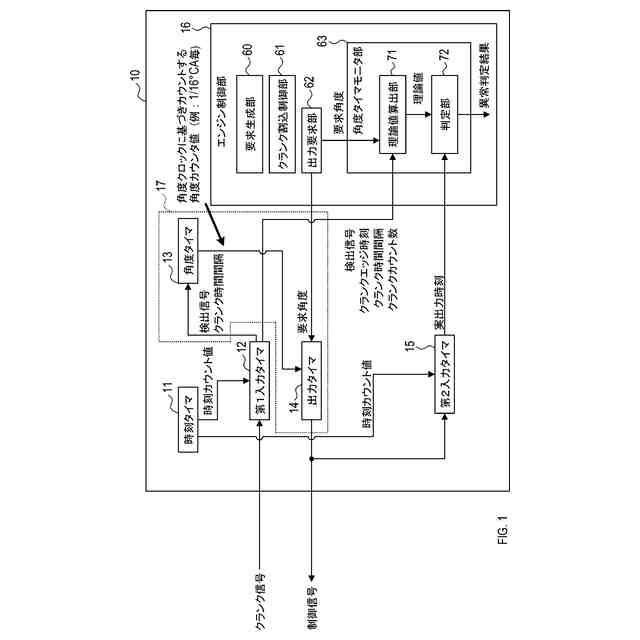
【解決手段】エンジン制御装置10は、実出力時刻取得部(16、S110)と、理論値時刻算出部71と、正常判定部72と、を備える。実出力時刻取得部は、制御信号が出力された時刻である実出力時刻を取得する。理論値時刻算出部は、実出力時刻の理論値である理論値時刻を、少なくとも、直近のクランク信号と直近1つ前のクランク信号との時間間隔である直近のインターバル時間に基づいて算出する。正常判定部は、実出力時刻と理論値時刻との差が予め定められた異常時閾値未満である場合に、角度クロック部が正常であると判定する。
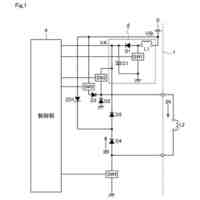
【選択図】図1
特許請求の範囲
【請求項1】
車両に搭載されるエンジン制御装置であって、
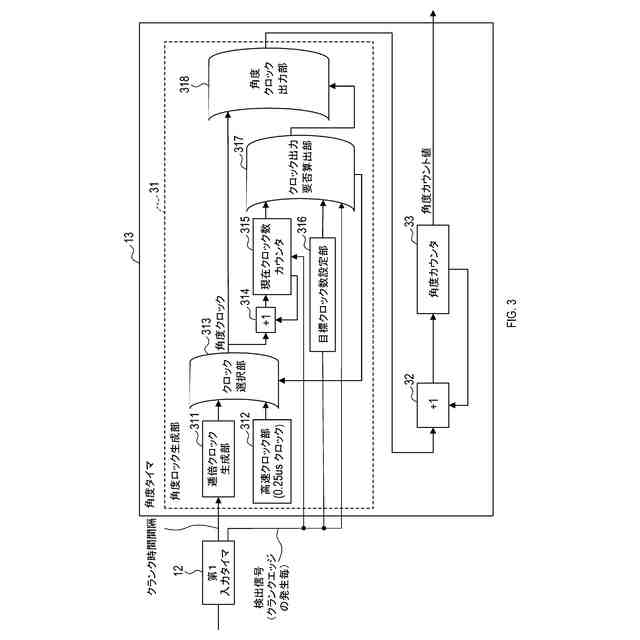
クランク軸の回転に伴って所定のクランク角度間隔でパルスとして発生するクランク信号が検出されると、検出された今回の前記クランク信号と前回の前記クランク信号との時間間隔を、予め設定された逓倍数で除算した周期の逓倍クロックを角度クロックとして、前記角度クロックのカウント数である角度カウント値を出力する角度クロック部(13)と、制御信号に従って制御を行う制御対象に前記角度カウント値及び予め設定されたクランク軸の回転角度位置としての要求角度に基づいて前記制御信号を出力する実行部(14)と、を含む出力部(17)から前記制御信号が出力された時刻である実出力時刻、を取得するように構成された実出力時刻取得部(16、S110)と、
前記実出力時刻以前に検出された前記クランク信号のうち、前記実出力時刻に最も近いタイミングで検出された前記クランク信号を直近のクランク信号、2番目に近いタイミングで検出された前記クランク信号を直近1つ前のクランク信号として、前記実出力時刻の理論値である理論値時刻を、少なくとも、前記直近のクランク信号と前記直近1つ前のクランク信号との時間間隔である直近のインターバル時間に基づいて算出するように構成された理論値時刻算出部(16、S160、S170)と、
前記実出力時刻と前記理論値時刻との差が予め定められた異常時閾値未満である場合に、前記角度クロック部が正常であると判定するように構成された正常判定部(16、S190)と、
を備える、エンジン制御装置(10)。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のエンジン制御装置であって、
前記角度クロック部は、前記クランク信号が検出されると、前記角度カウント値によって示される前記クランク軸の回転角度位置が、検出された前記今回のクランク信号に対応する前記クランク軸の回転角度位置未満である場合に、前記逓倍クロックよりも周期の短い高速クロックを前記角度クロックとして、前記高速クロックのカウント数を前記角度カウント値として出力し、前記角度カウント値を、前記今回のクランク信号に対応するクランク軸の回転角度位置を示すカウント数まで変化させた後に、再び前記逓倍クロックを前記角度クロックとするハイレート機能を有し、
当該エンジン制御装置は、
前記制御信号が出力されたことが検出されると、前記車両が加速しているか否かを判定するように構成された加速判定部(S150)を更に備え、
前記理論値時刻算出部は、前記車両が加速していると判定された場合に、前記車両が加速していないと判定された場合とは異なる態様で、前記理論値時刻を算出する、エンジン制御装置。
【請求項3】
請求項2に記載のエンジン制御装置であって、
前記加速判定部は、前記制御信号が出力されたことが検出されると、前記直近のクランク信号に対応する前記クランク軸の回転角度位置を取得し、前記直近のクランク信号に対応する前記クランク軸の回転角度位置が前記要求角度よりも大きい場合に、前記車両が加速していると判定する、エンジン制御装置。
【請求項4】
請求項2に記載のエンジン制御装置であって、
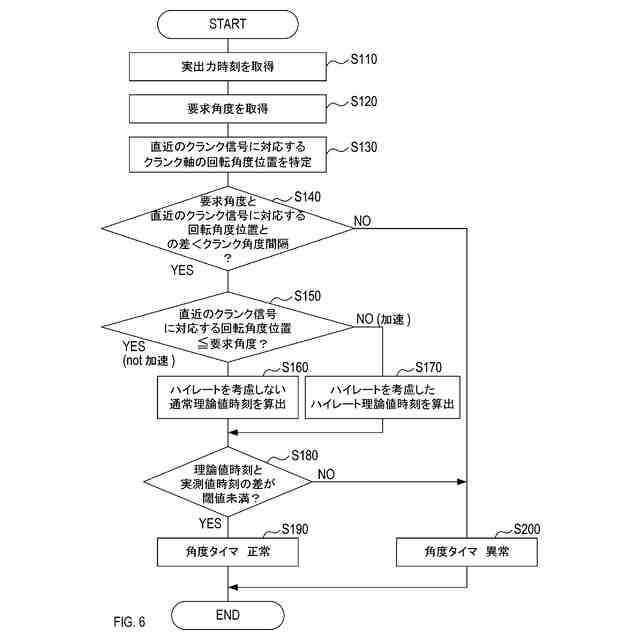
前記理論値時刻算出部(S160)は、前記車両が加速していないと判定された場合に、前記直近のインターバル時間を前記クランク角度間隔で除算した1°CA時間を算出し、前記直近のクランク信号に対応するクランク軸の回転角度位置と前記要求角度との差分と前記1°CA時間とを乗算した時間を算出し、前記直近のクランク信号が発生した時刻に、前記乗算した時間を加算した時刻を、前記理論値時刻として算出する、エンジン制御装置。
【請求項5】
請求項2に記載のエンジン制御装置であって、
前記理論値時刻算出部(S170)は、加速が生じていると判定された場合に、前記ハイレート機能が開始されたと推定されるクランク軸の回転角度位置である加速開始角度位置を算出し、直近のクランク信号が発生した時刻に、前記要求角度と前記加速開始角度位置との角度差を前記高速クロックに基づいてカウントするために要する時間を加算した時刻を、前記理論値時刻として算出する、エンジン制御装置。
【請求項6】
請求項5に記載のエンジン制御装置であって、
前記理論値時刻算出部は、前記直近1つ前のクランク信号よりも前に検出された前記クランク信号のうち、前記直近1つ前のクランク信号に最も近いタイミングで検出された前記クランク信号を直近2つ前のクランク信号とし、前記直近1つ前のクランク信号と前記直近2つ前のクランク信号との時間間隔を1つ前のインターバル時間とし、前記直近のインターバル時間の前記1つ前のインターバル時間に対する比をインターバル比とし、前記クランク角度間隔に前記インターバル比を乗じた角度を通常角度間隔として、前記直近1つ前のクランク信号に対応するクランク軸の回転角度位置に、前記通常角度間隔を加算した角度を、前記加速開始角度位置として算出する、エンジン制御装置。
【請求項7】
請求項2に記載のエンジン制御装置であって、
前記制御信号が出力されたことが検出されると、前記直近のクランク信号に対応するクランク軸の回転角度位置と、前記要求角度との差が、前記クランク角度間隔よりも大きい場合に、前記角度クロック部が異常であると判定するように構成された初期判定部(16、S140)、を更に備え、
前記理論値時刻算出部は、前記初期判定部によって前記角度クロック部が異常であると判定されなかった場合に前記理論値を算出する、エンジン制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、エンジンのクランク軸の回転に伴って発生するクランク信号よりも周期の短い角度クロックに基づいてエンジン制御を行う技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
エンジンのクランク軸の回転に伴って発生するクランク信号に対応するクランク軸の回転角度位置に基づいてエンジンを制御する技術が知られている。
例えば、下記特許文献1に記載された技術では、クランク軸の回転に応じて所定の角度間隔でパルスとして発生するクランク信号よりも短い周期の角度クロックに基づいて、高精度にエンジン制御を実行する、という技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-190344号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
角度クロックはクランク信号の周期(すなわち、パルス間隔)を所定の逓倍数で除算した周期の信号である。上述の技術では、角度クロックのカウント数に対応するクランク軸の回転角度位置が所定角度になったタイミングで、エンジン制御を行うための制御信号が出力される。
【0005】
しかしながら、角度クロックを生成し該角度クロックをカウントする角度クロック部に異常が発生すると、異常である角度クロックに基づいてエンジン制御が行われるため、適切なタイミングでエンジン制御が行われないおそれがある。適切なタイミングでエンジン制御が行われていることを保証するためには、少なくとも角度クロック部が正常であることを保証する必要がある。
【0006】
本開示の1つの局面は、角度クロック生成部が正常であることを保証するための技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様は、車両に搭載されるエンジン制御装置(10)である。エンジン制御装置は、実出力時刻取得部(16、S110)と、理論値時刻算出部(16、S160、S170)と、正常判定部(16、S190)と、を備える。検出部は、角度クロック部(13)と、実行部(14)と、を含む出力部(17)から、制御信号が出力されたことを検出するように構成される。
【0008】
角度クロック部は、クランク信号が検出されると、検出された今回のクランク信号と前回のクランク信号との時間間隔を、予め設定された逓倍数で除算した周期の逓倍クロックを角度クロックとして、角度クロックのカウント数である角度カウント値を出力する。クランク信号は、クランク軸の回転に伴って所定のクランク角度間隔でパルスとして発生する信号である。実行部は、角度カウント値及び予め設定されたクランク軸の回転角度位置としての要求角度に基づいて制御信号に従って制御を行う制御対象に制御信号を出力する。
【0009】
実出力時刻取得部は、制御信号が出力された時刻である実出力時刻を取得するように構成される。理論値時刻算出部は、実出力時刻の理論値である理論値時刻を、少なくとも、直近のクランク信号と直近1つ前のクランク信号との時間間隔である直近のインターバル時間に基づいて算出するように構成される。直近のクランク信号は、実出力時刻以前に検出されたクランク信号のうち、実出力時刻に最も近いタイミングで検出されたクランク信号である。
【0010】
直近1つ前のクランク信号は、実出力時刻以前に検出されたクランク信号のうち、実出力時刻に2番目に近いタイミングで検出されたクランク信号である。正常判定部は、実出力時刻と理論値時刻との差が予め定められた異常時閾値未満である場合に、角度クロック部が正常であると判定するように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
表示装置
14日前
株式会社デンソー
表示装置
7日前
株式会社デンソー
送風装置
9日前
株式会社デンソー
真空装置
10日前
株式会社デンソーテン
表示装置
10日前
株式会社デンソー
通信装置
14日前
株式会社デンソー
管理装置
14日前
株式会社デンソー
駆動装置
14日前
株式会社デンソー
切断装置
16日前
株式会社デンソー
半導体装置
7日前
株式会社デンソー
レーダ装置
14日前
株式会社デンソー
電力変換器
8日前
株式会社デンソー
音低減装置
7日前
株式会社デンソー
電力変換器
8日前
株式会社デンソー
蓄放熱材料
2日前
株式会社デンソー
レーダ装置
18日前
株式会社デンソー
ガスケット
2日前
株式会社デンソー
流路形成装置
7日前
株式会社デンソー
流路形成装置
7日前
株式会社デンソー
表示制御装置
18日前
株式会社デンソー
物品昇降装置
14日前
株式会社デンソー
電力変換装置
14日前
株式会社デンソー
電気化学セル
18日前
株式会社デンソー
リニアモータ
10日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソー
スイッチ回路
15日前
株式会社デンソー
電気接続装置
15日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソー
運転支援装置
7日前
株式会社デンソー
画像処理装置
15日前
株式会社デンソー
電気化学セル
21日前
株式会社デンソー
モータ制御装置
1日前
株式会社デンソー
車両用表示装置
9日前
株式会社デンソー
車両用表示装置
7日前
株式会社デンソーウェーブ
産業用ロボット
10日前
株式会社デンソー
車両用表示装置
7日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ