TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024094358
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2024064398,2022500175
出願日
2024-04-12,2020-02-14
発明の名称
学習装置、学習方法、プログラム、及び、レーダ装置
出願人
日本電気株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
13/66 20060101AFI20240702BHJP(測定;試験)
要約
【課題】追尾精度と追従性とを両立した追尾処理を実行可能なレーダ装置を提供する。
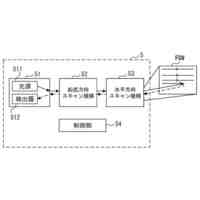
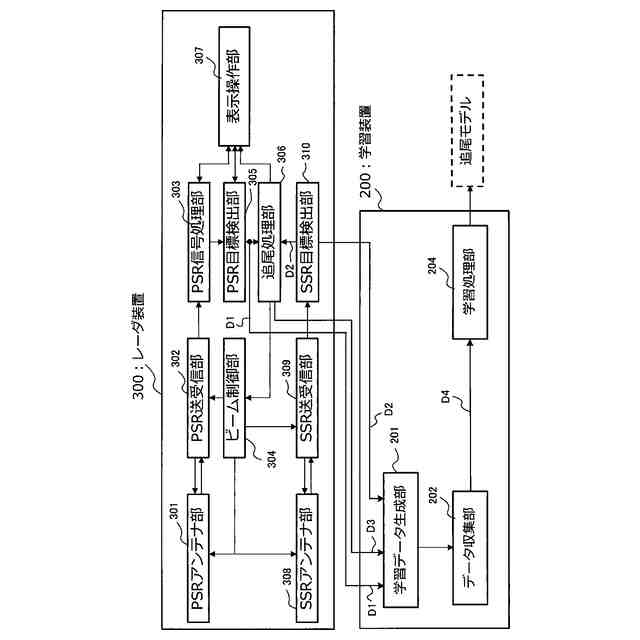
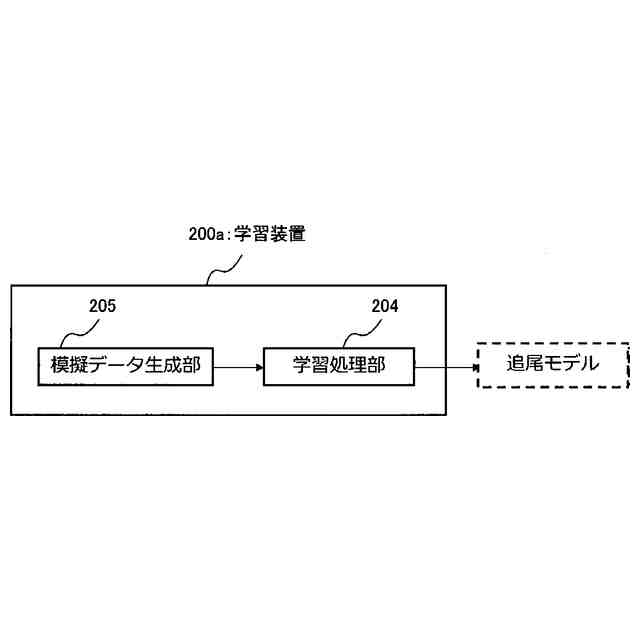
【解決手段】学習装置は、レーダ装置に使用される追尾モデルを学習する。第1取得部は、受信波に基づいて検出された目標の位置を示す目標検出情報と、目標検出情報に基づいて算出された前記目標の航跡とをレーダ装置から取得する。第2取得部は、目標の位置を示す目標位置情報を取得する。学習データ生成部は、目標検出情報と、航跡と、目標位置情報とを用いて、学習データを生成する。学習処理部は、学習データを用いて、目標検出情報に基づいて目標の追尾処理を行う追尾モデルを学習する。
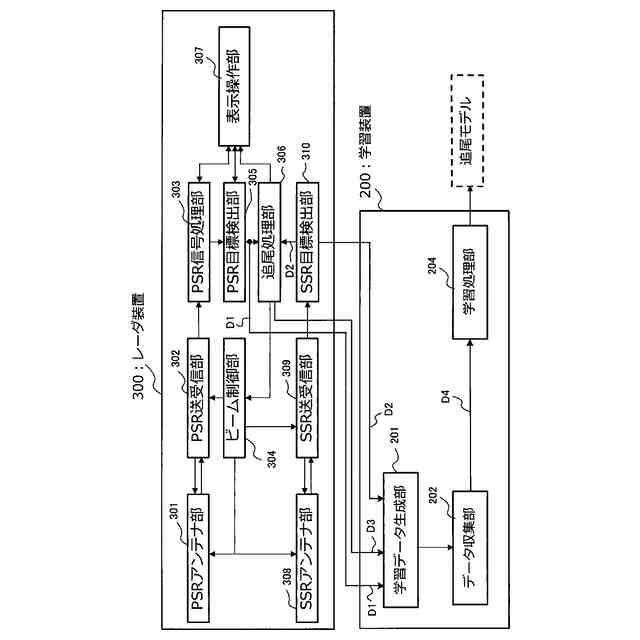
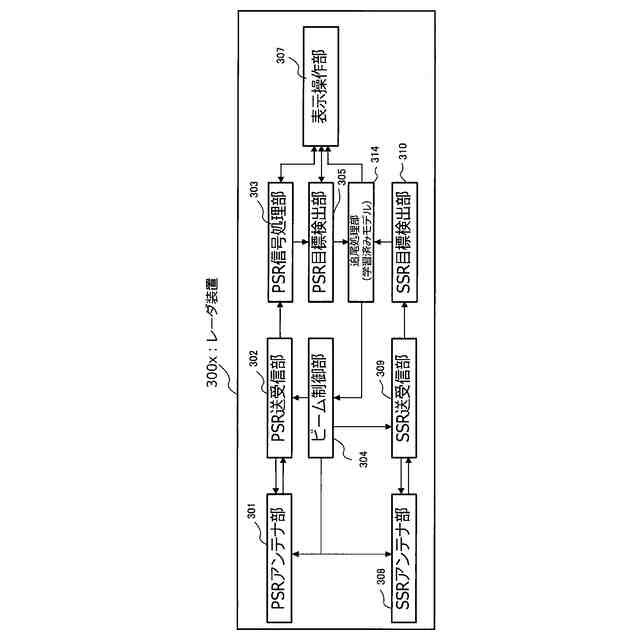
【選択図】図3
特許請求の範囲
【請求項1】
レーダ装置からの送信波の送信に応じて受信した受信波に基づいて検出された航空機の位置を示す目標検出情報と、前記目標検出情報に基づいて算出された前記航空機の航跡とを前記レーダ装置から取得する第1取得手段と、
前記航空機の位置を示す目標位置情報を取得する第2取得手段と、
前記目標検出情報と、前記航跡と、前記目標位置情報とを用いて、学習データを生成する学習データ生成手段と、
前記目標検出情報と、前記目標検出情報に対するラベルと、を含む模擬データをシミュレーションにより生成する模擬データ生成手段と、
前記学習データ及び前記模擬データを用いて、前記目標検出情報に基づいて前記航空機の追尾処理を行う追尾モデルを学習する学習処理手段と、
前記航空機を追尾するための第1送信波と、前記学習データの生成に不足している条件に対応するデータを収集するための第2送信波と、のうちのいずれかを前記送信波として選択的に送信させるための制御を前記レーダ装置に対して行うレーダ制御手段と、
を備える学習装置。
続きを表示(約 1,500 文字)
【請求項2】
前記学習データ生成手段は、前記目標位置情報に基づいて、前記目標検出情報が示す航空機が真目標であるか誤目標であるかを示す教師ラベルを生成する請求項1に記載の学習装置。
【請求項3】
前記学習データ生成手段は、前記目標位置情報及び前記航跡に基づいて、前記目標検出情報が示す航空機の位置、速度、及び、加速度を含む教師ラベルを生成する請求項1又は2に記載の学習装置。
【請求項4】
前記目標検出情報は、前記レーダ装置の1次レーダにより生成される1次レーダプロットであり、
前記目標位置情報は、2次レーダにより生成される2次レーダプロットである請求項1乃至3のいずれか一項に記載の学習装置。
【請求項5】
前記目標位置情報は、前記航空機からの受信信号に含まれる、当該航空機の自己位置情報である請求項1乃至4のいずれか一項に記載の学習装置。
【請求項6】
前記レーダ制御手段は、前記第2送信波を前記送信波として送信させるための制御を前記レーダ装置に対して行った際に、前記条件に対応する前記目標検出情報を生成させるための制御を前記レーダ装置に対してさらに行う請求項1乃至5のいずれか一項に記載の学習装置。
【請求項7】
前記レーダ装置は移動体に搭載され、
前記移動体の位置及び移動情報を含む移動体情報を取得する第3取得手段を備え、
前記学習データ生成手段は、前記移動体情報を用いて前記学習データを生成する請求項1乃至6のいずれか一項に記載の学習装置。
【請求項8】
前記レーダ装置は、前記追尾モデルを用いて前記目標検出情報及び前記航跡を生成する2つのデータ処理手段と、当該2つのデータ処理手段のうちの一方をアクティブ状態にしつつ他方をスタンバイ状態に切り替えることが可能な切替手段と、を有し、
前記第1取得手段は、前記2つのデータ処理手段のうちの前記アクティブ状態に切り替えられた一方のデータ処理手段から前記目標検出情報及び前記航跡を取得し、
前記一方のデータ処理手段から得られた前記目標検出情報及び前記航跡に対応する前記学習データを用いて学習が行われた前記追尾モデルを、前記2つのデータ処理手段のうちの前記スタンバイ状態に切り替えられた他方のデータ処理手段に対して適用する学習結果適用手段をさらに有する請求項1に記載の学習装置。
【請求項9】
前記レーダ装置は、前記追尾モデルを用いずに前記目標検出情報及び前記航跡を生成することにより第1処理結果を取得する第1データ処理手段と、前記追尾モデルを用いて前記目標検出情報及び前記航跡を生成することにより第2処理結果を取得する第2データ処理手段と、当該第1処理結果及び当該第2処理結果を比較することにより前記追尾モデルの学習に係る妥当性を判定する妥当性評価手段と、を有する請求項1に記載の学習装置。
【請求項10】
前記レーダ装置は、時間的に前に学習された前記追尾モデルを用いて前記目標検出情報及び前記航跡を生成することにより第1処理結果を取得する第1データ処理手段と、時間的に後に学習された前記追尾モデルを用いて前記目標検出情報及び前記航跡を生成することにより第2処理結果を取得する第2データ処理手段と、当該第1処理結果及び当該第2処理結果を統合することにより第3処理結果を取得する統合手段と、を有し、
前記第1取得手段は、前記第3処理結果に対応する前記目標検出情報及び前記航跡を前記レーダ装置から取得する請求項1に記載の学習装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、レーダを用いた監視技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
レーダを用いて航空機などの移動体を監視する手法が知られている。特許文献1は、レーダ装置により航空機や車両などの移動目標を監視する手法を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2016-151416号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
追尾機能を有するレーダ装置において、急峻な旋回などを行う高機動目標を追尾するには追尾精度と追従性とを両立した追尾フィルタを用いる必要があるが、実際にそのような追尾フィルタを実現することは難しい。また、目標を追尾する際には目標とプロットとを対応付ける相関処理を行うが、クラッタが多い領域では、誤検出したクラッタを目標に対応付けてしまう恐れがあり、追尾精度が低下してしまう。
【0005】
本発明の1つの目的は、追尾精度と追従性とを両立した追尾処理を実行可能なレーダ装置を実現することにある。
【課題を解決するための手段】
【0006】
本発明の一つの観点では、学習装置は、
レーダ装置からの送信波の送信に応じて受信した受信波に基づいて検出された航空機の位置を示す目標検出情報と、前記目標検出情報に基づいて算出された前記航空機の航跡とを前記レーダ装置から取得する第1取得手段と、
前記航空機の位置を示す目標位置情報を取得する第2取得手段と、
前記目標検出情報と、前記航跡と、前記目標位置情報とを用いて、学習データを生成する学習データ生成手段と、
前記目標検出情報と、前記目標検出情報に対するラベルと、を含む模擬データをシミュレーションにより生成する模擬データ生成手段と、
前記学習データ及び前記模擬データを用いて、前記目標検出情報に基づいて前記航空機の追尾処理を行う追尾モデルを学習する学習処理手段と、
前記航空機を追尾するための第1送信波と、前記学習データの生成に不足している条件に対応するデータを収集するための第2送信波と、のうちのいずれかを前記送信波として選択的に送信させるための制御を前記レーダ装置に対して行うレーダ制御手段と、を備える。
【0007】
本発明の他の観点では、学習方法は、
レーダ装置からの送信波の送信に応じて受信した受信波に基づいて検出された航空機の位置を示す目標検出情報と、前記目標検出情報に基づいて算出された前記航空機の航跡とを前記レーダ装置から取得し、
前記航空機の位置を示す目標位置情報を取得し、
前記目標検出情報と、前記航跡と、前記目標位置情報とを用いて、学習データを生成し、
前記目標検出情報と、前記目標検出情報に対するラベルと、を含む模擬データをシミュレーションにより生成し、
前記学習データ及び前記模擬データを用いて、前記目標検出情報に基づいて前記航空機の追尾処理を行う追尾モデルを学習し、
前記航空機を追尾するための第1送信波と、前記学習データの生成に不足している条件に対応するデータを収集するための第2送信波と、のうちのいずれかを前記送信波として選択的に送信させるための制御を前記レーダ装置に対して行う。
【0008】
本発明の他の観点では、プログラムは、
レーダ装置からの送信波の送信に応じて受信した受信波に基づいて検出された航空機の位置を示す目標検出情報と、前記目標検出情報に基づいて算出された前記航空機の航跡とを前記レーダ装置から取得し、
前記航空機の位置を示す目標位置情報を取得し、
前記目標検出情報と、前記航跡と、前記目標位置情報とを用いて、学習データを生成し、
前記目標検出情報と、前記目標検出情報に対するラベルと、を含む模擬データをシミュレーションにより生成し、
前記学習データ及び前記模擬データを用いて、前記目標検出情報に基づいて前記航空機の追尾処理を行う追尾モデルを学習し、
前記航空機を追尾するための第1送信波と、前記学習データの生成に不足している条件に対応するデータを収集するための第2送信波と、のうちのいずれかを前記送信波として選択的に送信させるための制御を前記レーダ装置に対して行う処理をコンピュータに実行させる。
【0009】
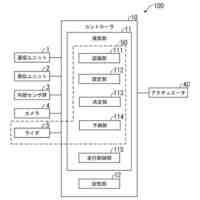
本発明の他の観点では、レーダ装置は、
送信波を送信し、当該送信波に対応する受信波に基づいて、航空機の位置を示す目標検出情報を生成する目標検出手段と、
前記目標検出情報と、前記目標検出情報に基づいて算出された前記航空機の航跡と、前記航空機の位置を示す目標位置情報とに基づいて生成された学習データ、及び、前記目標検出情報と、前記目標検出情報に対するラベルと、を含むデータを生成するためのシミュレーションにより得られた模擬データを用いて学習済みの追尾モデルを用いて、前記目標検出情報に基づいて前記航空機の追尾処理を行う追尾処理手段と、
前記航空機を追尾するための第1送信波と、前記学習データの生成に不足している条件に対応するデータを収集するための第2送信波と、のうちのいずれかを前記送信波として選択的に送信させるための制御を行うレーダ制御手段と、を備える。
【発明の効果】
【0010】
本発明によれば、追尾精度と追従性とを両立した追尾処理を実行可能なレーダ装置を実現することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
2日前
個人
検出体内蔵型荷重計測盤
4日前
株式会社ニフコ
保持構造
2日前
キヤノン株式会社
枠部材
10日前
中国電力株式会社
測定端子
2日前
株式会社SUBARU
車両
9日前
個人
交差点形状表現アルゴリズム
23日前
日本電波工業株式会社
感知センサ
9日前
個人
多元作用力検出機能性締結金具
16日前
住江織物株式会社
排尿検知システム
11日前
日本無線株式会社
レーダ装置
16日前
日本碍子株式会社
ガスセンサ
5日前
日本碍子株式会社
ガスセンサ
5日前
中国電力株式会社
漏水測定装置
4日前
個人
重量測定装置
4日前
株式会社 キョーワ
食品秤量搬送装置
10日前
矢崎総業株式会社
車両用表示装置
6日前
本田技研工業株式会社
車載検出器
4日前
キヤノン株式会社
検査装置及び検査方法
10日前
株式会社ビードットメディカル
計測装置
9日前
本田技研工業株式会社
外界認識装置
4日前
株式会社デンソー
光学センサ
5日前
トヨタ自動車株式会社
回路基板の検査方法
11日前
住友金属鉱山株式会社
異物検査装置
9日前
バイオニクス株式会社
光学測定装置
17日前
株式会社東芝
センサ及び電子装置
18日前
東海電子株式会社
電子機器およびプログラム
18日前
清水建設株式会社
孔壁測定方法
2日前
NTN株式会社
ワークの寸法取得方法
9日前
株式会社バンダイ
検査プログラム及び検査システム
10日前
株式会社東芝
画像処理装置
12日前
日産自動車株式会社
ナビゲーション装置
12日前
日本特殊陶業株式会社
センサの取付構造
12日前
ローム株式会社
MEMSデバイス
6日前
株式会社ユピテル
システムおよびプログラム等
10日前
株式会社東設土木コンサルタント
浮体装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ