TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086576
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2023178396
出願日
2023-10-16
発明の名称
制御装置、自動運転装置及び走行制御装置
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20240620BHJP(信号)
要約
【課題】ドライバへの円滑な運転交代を実現可能な制御装置を提供する。
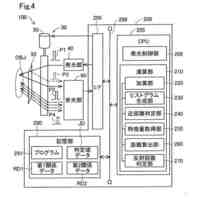
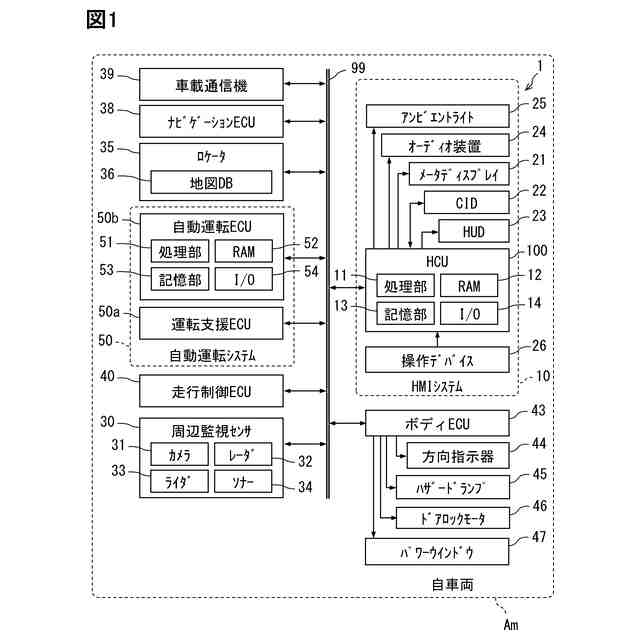
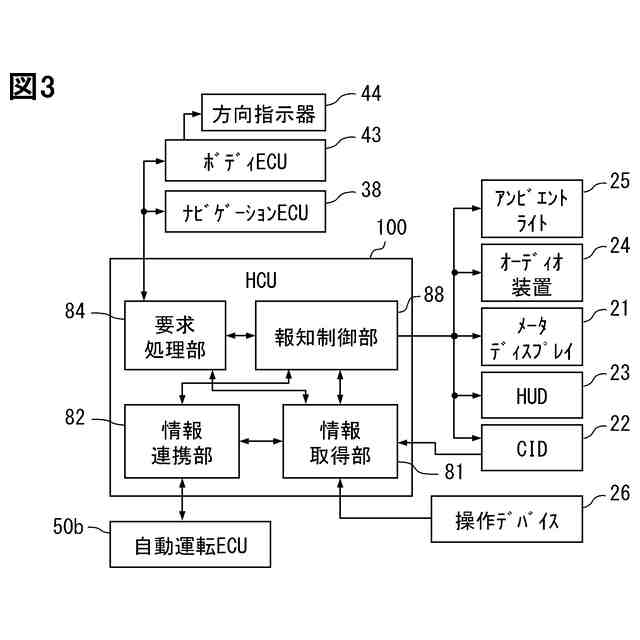
【解決手段】制御装置としてのHCU100は、ドライバに周辺監視義務のない自動運転によって走行可能な自車両Amにおいて、車載装置21,22,23,24,25,28の制御を行う。HCU100は、自動運転中の自車両Amと他の物体との衝突の発生の有無を示す衝突発生情報と、衝突に対応した車両の制御を示す車両制御情報と、を把握する情報連携部82と、車両の制御の状態を示す報知と、ドライバへの運転交代を促す報知とを、両方実施する報知制御部88と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
ドライバに周辺監視義務のない自動運転によって走行可能な車両(Am)において、車載装置(21,22,23,24,25,28)の制御を行う制御装置であって、
前記自動運転中の前記車両と他の物体との衝突の発生の有無を示す衝突発生情報と、前記衝突に対応した前記車両の制御を示す車両制御情報と、を把握する情報把握部(81,82)と、
前記車両の制御の状態を示す報知と、前記ドライバへの運転交代を促す報知とを、両方実施する報知制御部(88)と、を備える制御装置。
続きを表示(約 870 文字)
【請求項2】
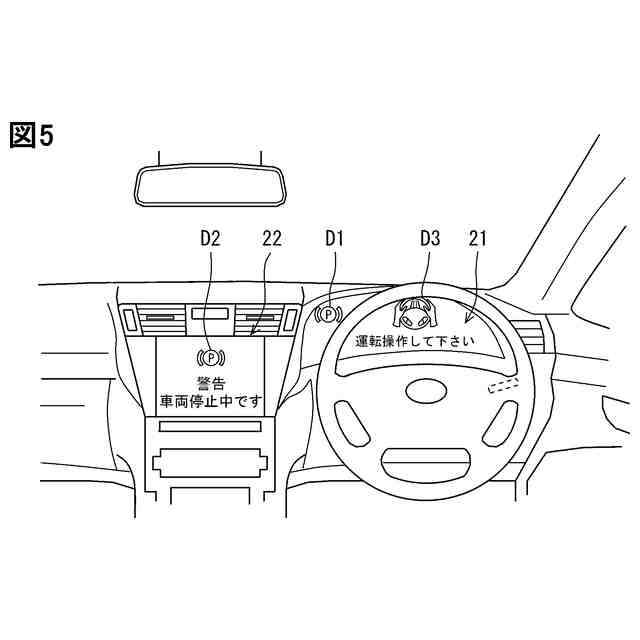
前記車両の制御の状態を示す報知は、ブレーキの作動により前記車両の移動が規制されていることを示す報知と、前記車両のハザードランプ(45)が点灯していることを示す報知と、を含む請求項1に記載の制御装置。
【請求項3】
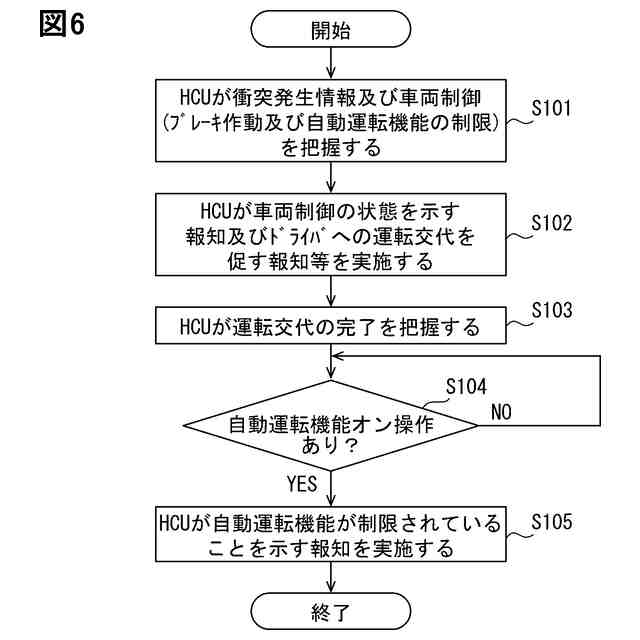
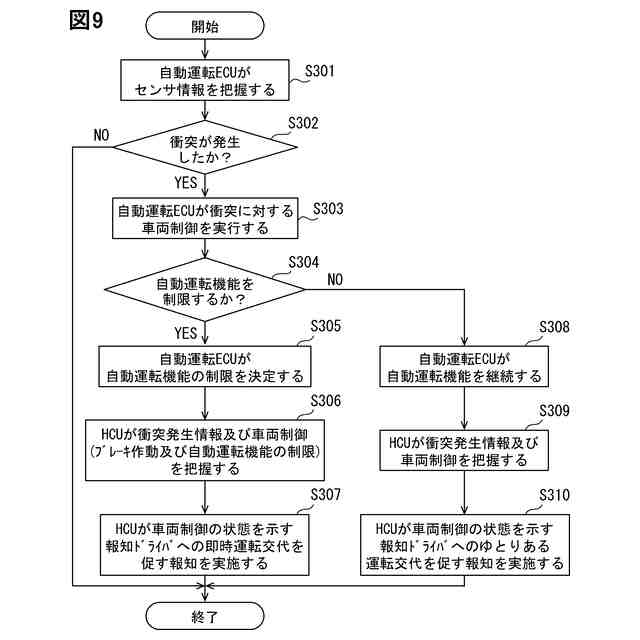
前記情報把握部が前記衝突の発生後に前記車両の自動運転機能が制限されていることを把握した場合に、前記報知制御部は、前記自動運転機能が制限されていることを示す報知を実施する請求項1に記載の制御装置。
【請求項4】
前記情報把握部は、前記車両の操作デバイス(26)に対する自動運転機能をオンにする操作を把握し、
前記衝突の発生後に前記自動運転機能が制限されていることが把握され、かつ、前記自動運転機能をオンにする操作が把握された場合に、前記報知制御部は、前記自動運転機能が制限されていることを示す報知を実施する請求項1に記載の制御装置。
【請求項5】
前記車両において、前記自動運転機能の制限の解除は、車両管理者によって初期化作業が実行されるまで、禁止される仕様となっている請求項3又は4に記載の制御装置。
【請求項6】
前記車両において、前記自動運転機能の制限の解除は、前記車両の起動スイッチがオフ状態とされることに基づいて実行される仕様となっている請求項3又は4に記載の制御装置。
【請求項7】
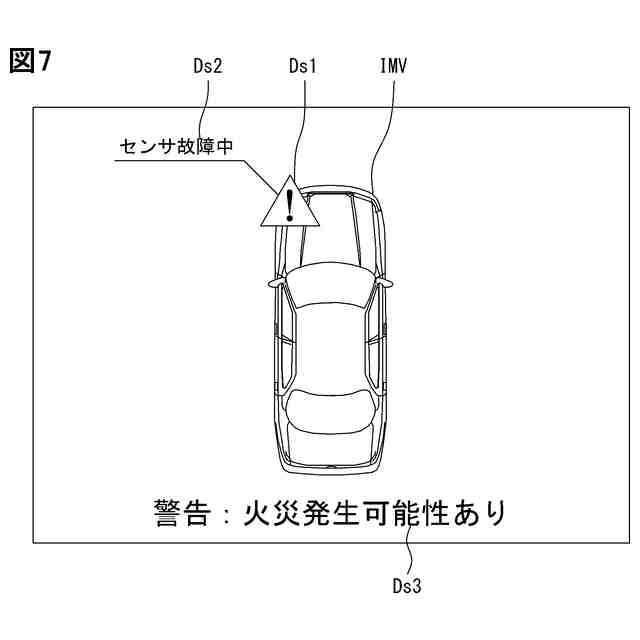
前記報知制御部は、前記車両の衝突部分を示す報知を、さらに実施する請求項1に記載の制御装置。
【請求項8】
前記報知制御部は、前記衝突部分に関連付けられた故障を示す報知を、さらに実施する請求項7に記載の制御装置。
【請求項9】
前記報知制御部は、前記車両の火災の可能性を示す報知を、さらに実施する請求項1に記載の制御装置。
【請求項10】
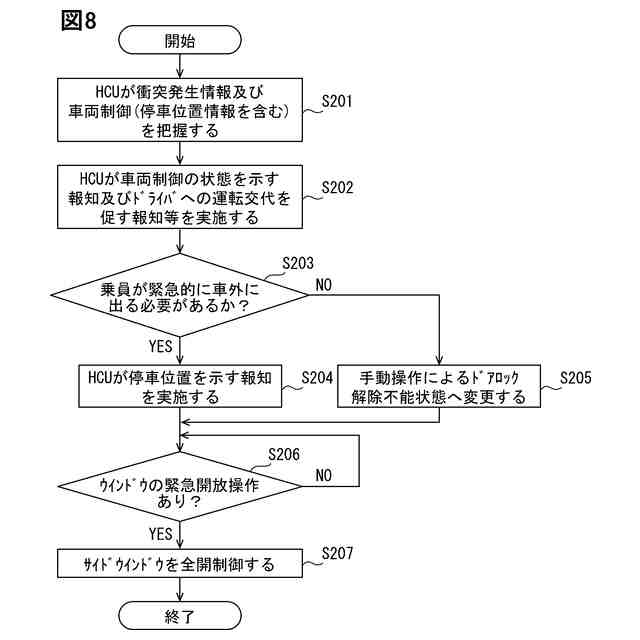
前記報知制御部は、前記車両が停車した道路上の位置を示す報知を、さらに実施する請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書による開示は、車両の自律走行時における衝突に対応する技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、車両において、自動運転の継続が可能でないことを報知する警告を、ドライバの状態に応じた警告方法により行うことが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-107502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
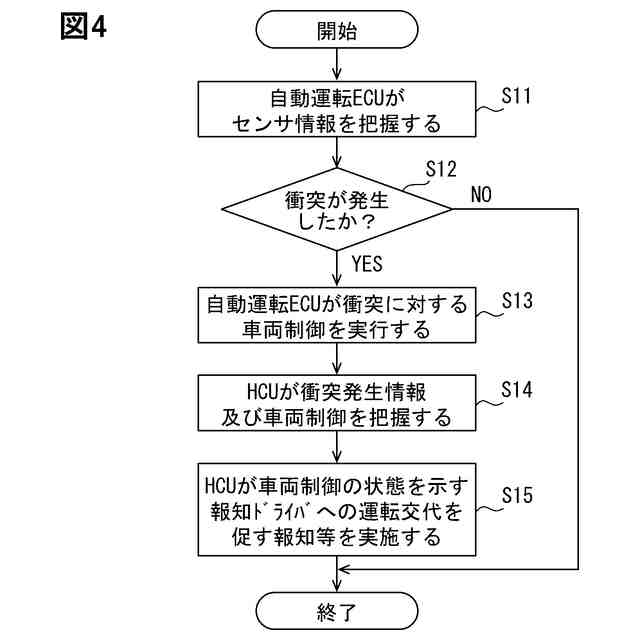
さて、ドライバに周辺監視義務が課せられていない自動運転中においても、車両が他の物体と衝突し、その結果、自動運転の継続が不可能となる状況が想定される。このような状況において、ドライバが周辺監視をしていない場合、ドライバは何が起きたのかすぐに把握することが難しい。このため、円滑に運転交代できないことが懸念されている。
【0005】
この明細書の開示による目的のひとつは、ドライバへの円滑な運転交代を実現可能な制御装置を提供することにある。また、この制御装置に適した自動運転装置及び走行制御装置を提供することにある。
【課題を解決するための手段】
【0006】
ここに開示された態様のひとつは、ドライバに周辺監視義務のない自動運転によって走行可能な車両(Am)において、車載装置(21,22,23,24,25,28)の制御を行う制御装置であって、
自動運転中の車両と他の物体との衝突の発生の有無を示す衝突発生情報と、衝突に対応した車両の制御を示す車両制御情報と、を把握する情報把握部(81,82)と、
車両の制御の状態を示す報知と、ドライバへの運転交代を促す報知とを、両方実施する報知制御部(88)と、を備える。
【0007】
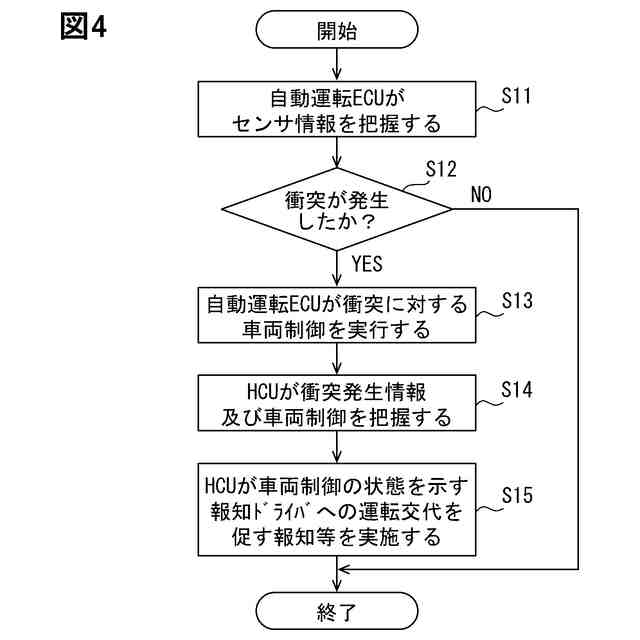
このような態様によると、ドライバが周辺監視をしていなかった状況であっても、2つの報知が両方実施されるので、ドライバは衝突に対応した車両の制御の状態とドライバがすべきことを把握することができる。この結果、ドライバが車両の制御の状態を理解した上で、運転交代の動作を開始できるので、ドライバへの円滑な運転交代が実現可能となる。
【0008】
また、ここに開示された態様の他のひとつは、上記に記載の制御装置と通信可能に構成され、車両の自動運転を実施する自動運転装置であって、
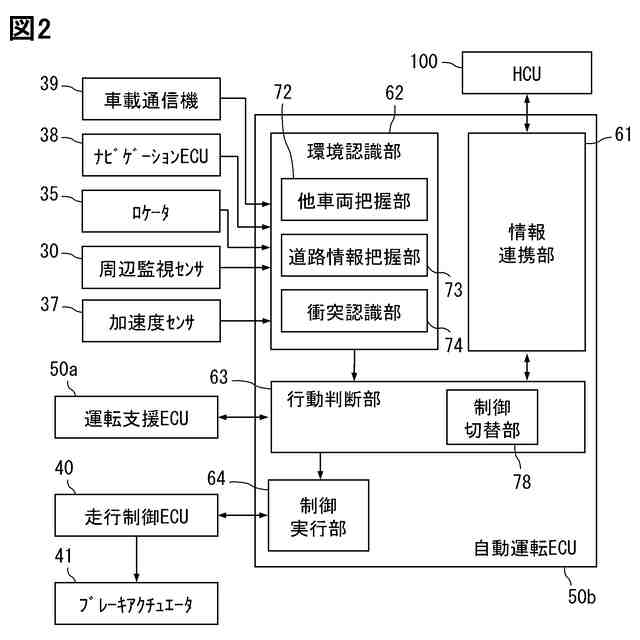
車両の周辺における、複数の他の物体同士の衝突の発生を認識する衝突認識部(74)と、
車両が衝突発生現場から離れることが可能か否かの判断に応じて、自動運転の制御に関する対応を変更する行動判断部(63)と、を備える。
【0009】
また、ここに開示された態様の他のひとつは、上記に記載の制御装置と通信可能に構成され、車両の走行を制御する走行制御装置であって、
衝突の発生後、衝突に応じて、車両の運動を制限する運動制限部(40b)を備える。
【0010】
これらの態様では、上記に記載の制御装置に適した自動運転装置及び走行制御装置を提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
通信装置
25日前
株式会社デンソー
圧電素子
11日前
株式会社デンソー
測距装置
11日前
株式会社デンソーテン
表示装置
21日前
株式会社デンソー
真空装置
21日前
株式会社デンソー
電気機器
11日前
株式会社デンソー
表示装置
18日前
株式会社デンソー
演算装置
7日前
株式会社デンソー
送風装置
20日前
株式会社デンソー
ステータ
7日前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
ガスケット
13日前
株式会社デンソー
蓄放熱材料
13日前
株式会社デンソー
音低減装置
18日前
株式会社デンソー
電力変換器
7日前
株式会社デンソー
電力変換器
7日前
株式会社デンソー
半導体装置
7日前
株式会社デンソー
電力変換器
19日前
株式会社デンソー
電力変換器
19日前
株式会社デンソー
半導体装置
6日前
株式会社デンソー
半導体装置
6日前
株式会社デンソー
運転支援装置
18日前
株式会社デンソー
燃料噴射装置
5日前
株式会社デンソー
物品昇降装置
25日前
株式会社デンソー
流路形成装置
18日前
株式会社デンソー
流路形成装置
18日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
フィルタ装置
11日前
株式会社デンソー
リニアモータ
21日前
株式会社デンソー
電力変換装置
25日前
株式会社デンソー
車両用表示装置
20日前
株式会社デンソー
車両用表示装置
18日前
株式会社デンソー
半導体発光装置
7日前
株式会社デンソー
車両用空調装置
11日前
株式会社デンソーウェーブ
産業用ロボット
21日前
株式会社デンソー
モータ制御装置
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ