TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024028392
公報種別
公開特許公報(A)
公開日
2024-03-04
出願番号
2024000566,2018227346
出願日
2024-01-05,2018-12-04
発明の名称
制御装置、制御方法、ロボットシステム、物品の製造方法、表示装置、プログラム及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
9/22 20060101AFI20240226BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】教示時のロボットアームの動作に基づいて所望の態様でロボットアームを制御する。
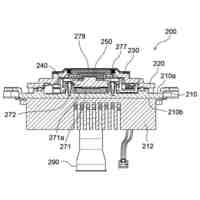
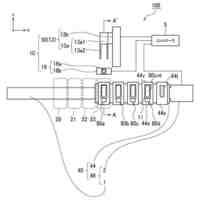
【解決手段】ロボット200は、ハンドリング部203と、ロボットの先端部に作用する第1力データを取得する第1センサ251と、ハンドリング部203に作用する第2力データを取得する第2センサ252と、ロボットアーム201の先端部の位置姿勢データを取得する第3センサ253と、を備えている。ロボット200を制御する制御装置は、ロボットアーム201の教示時の第1力データ及び第2力データの解析結果に基づき、第3センサ253の位置姿勢のデータに基づいてロボットアーム201を位置姿勢制御する第1期間と、第1力データ及び第2力データに基づいてロボットアーム201を力制御する第2期間とを有する教示データを生成する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームの動作を教示する際に操作されるハンドリング部と、ロボットの先端部に作用する第1力データを取得する第1センサと、前記ハンドリング部に作用する第2力データを取得する第2センサと、前記ロボットアームの先端部の位置姿勢データを取得する第3センサと、を備えるロボットの制御装置であって、
前記ロボットアームの教示時の前記第1力データ及び前記第2力データの解析結果に基づき、前記第3センサの前記位置姿勢のデータに基づいて前記ロボットアームを位置姿勢制御する第1期間と、前記第1力データ及び第2力データに基づいて前記ロボットアームを力制御する第2期間とを有する教示データを生成する生成手段と、
生成された前記教示データを格納する記憶部と、
を備えることを特徴とする制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記生成手段は、前記第3センサが取得した位置姿勢データのうちの2点間を所定の補間方法により補間して位置教示データを生成し、前記ロボットアームは、前記位置教示データに基づいて前記第1期間において位置姿勢制御される、
ことを特徴とする請求項1記載の制御装置。
【請求項3】
前記生成手段は、
前記第1及び第2力データに基づいて、教示時に前記ハンドリング部を操作した操作力を求めると共に、前記操作力に応じて前記第2期間において前記ロボットアームを力制御するための力教示データを生成し、
前記第2期間内の特定の期間については、前記操作力を平滑化し、この平滑化された操作力に応じて前記力教示データを生成する、
ことを特徴とする請求項1又は2記載の制御装置。
【請求項4】
前記生成手段は、前記第3センサによって取得した前記位置姿勢データに基づいて、前記ロボットアームの教示時のやり直し動作の有無を判定し、前記やり直し動作が有ると判定した場合には、失敗時の動作については、再現しないように前記教示データを生成する、
ことを特徴とする請求項1乃至3のいずれか1項記載の制御装置。
【請求項5】
前記第1センサは、前記ハンドリング部と、前記ロボットアームに支持されるエンドエフェクタとの間に設けられた力覚センサである、
ことを特徴とする請求項1乃至4のいずれか1項記載の制御装置。
【請求項6】
前記第2センサは、前記ロボットアームと前記ハンドリング部との間に設けられた力覚センサである、
ことを特徴とする請求項1乃至5のいずれか1項記載の制御装置。
【請求項7】
前記第1センサは、前記第2センサよりも、前記ロボットの先端部寄りに配設されている、
ことを特徴とする請求項1乃至6のいずれか1項記載の制御装置。
【請求項8】
前記生成手段により生成した教示データに対応した表示情報を表示部に出力する出力手段を備えた、
ことを特徴とする請求項1乃至7のいずれか1項記載の制御装置。
【請求項9】
前記出力手段は、前記表示部に対して前記表示情報を、前記第1期間と前記第2期間とを識別可能な時系列情報として表示する、
ことを特徴とする請求項8記載の制御装置。
【請求項10】
ユーザーからの操作を受け付けて、前記表示部に表示されている表示情報に対する変更操作を可能に制御する操作部と、
前記変更操作に基づき前記教示データを更新する更新手段と、を備えた、
ことを特徴とする請求項8又は9記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、教示者がロボットアームを手動で操作してロボットアームの動作を教示するダイレクト教示が可能なロボットの制御装置、制御方法、ロボットシステム、プログラム及び記録媒体に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、ロボットアームの動作を教示する際には、教示ペンダントのような操作装置を用いてエンドエフェクタなどを教示位置へ移動させる操作を行い、教示者が目視で位置を確認しつつ、教示位置を記憶させていた。その際、教示者が教示ペンダントに座標を入力するか教示ペンダントを操作して、ロボットアームを微小移動させる作業を繰り返す必要があり、作業が煩雑であったため、教示を効率的に行うことができなかった。
【0003】
そこで、教示における操作性を改善する方法の一つとしてダイレクト教示という技術がある。ダイレクト教示は、教示者がロボットの所定の箇所を掴んでロボットアームを手動で操作し、そのときのロボットアームの先端の位置姿勢データを取得し、そのデータを基にロボットアームの動作指令値を生成し、教示時の組立動作を再現するものである。ダイレクト教示では、ロボットアームを手動で導くだけで直感的に教示できるため、煩雑な作業なく簡単にロボットアームを動作させる教示データを生成することができる。教示者がロボットアームを手動で操作する場合、ロボット制御装置は、一般的にコンプライアンス制御またはインピーダンス制御と呼ばれる制御を行う。例えばロボット制御装置は、ロボットアームの先端に加わる力がゼロになるようにロボットアームを制御することで教示者が力を掛けた方向にロボットアームを動作させる。
【0004】
特許文献1には、教示者がロボットアームを手動で操作した際に、位置姿勢データとともに力トルクデータの時系列データを取得し、接触力に関する力教示データを生成するものが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2008-134903号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載されている方法は、接触力に関する力教示データを生成するものである。そのため、特許文献1に記載された力教示データに従ってロボットアームを再生動作させても、組み付け作業などの精密な作業が必要な箇所において、教示者が指示したようにロボットアームが動作するとは限らなかった。
【0007】
本発明は、教示時のロボットアームの動作に基づいて所望の態様でロボットアームを制御することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、ロボットアームの動作を教示する際に操作されるハンドリング部と、ロボットの先端部に作用する第1力データを取得する第1センサと、前記ハンドリング部に作用する第2力データを取得する第2センサと、前記ロボットアームの先端部の位置姿勢データを取得する第3センサと、を備えるロボットの制御装置であって、前記ロボットアームの教示時の前記第1力データ及び前記第2力データの解析結果に基づき、前記第3センサの前記位置姿勢のデータに基づいて前記ロボットアームを位置姿勢制御する第1期間と、前記第1力データ及び第2力データに基づいて前記ロボットアームを力制御する第2期間とを有する教示データを生成する生成手段と、生成された前記教示データを格納する記憶部と、を備えることを特徴とする。
【0009】
また、本発明は、ロボットアームの動作を教示する際に操作されるハンドリング部が設けられたロボットを制御装置が制御する制御方法であって、教示時に、第1センサを用いて前記ロボットの先端部に作用する第1力データ、第2センサを用いて前記ハンドリング部に作用する第2力データ、及び第3センサを用いて前記ロボットアームの先端部の位置姿勢データを取得し、前記第1力データ及び前記第2力データの解析結果に基づき、前記第3センサの前記位置姿勢のデータに基づいて前記ロボットアームを位置姿勢制御する第1期間と、前記第1力データ及び第2力データに基づいて前記ロボットアームを力制御する第2期間とを有する教示データを生成する、ことを特徴とする。
【発明の効果】
【0010】
本発明によれば、教示時のロボットアームの動作に基づいて所望の態様でロボットアームを制御することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
枠部材
2日前
キヤノン株式会社
トナー
18日前
キヤノン株式会社
トナー
18日前
キヤノン株式会社
撮像装置
18日前
キヤノン株式会社
記録装置
18日前
キヤノン株式会社
記録装置
18日前
キヤノン株式会社
電子機器
1日前
キヤノン株式会社
撮像装置
18日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
トナーパック
17日前
キヤノン株式会社
検品システム
4日前
キヤノン株式会社
画像形成装置
17日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
17日前
キヤノン株式会社
画像形成装置
17日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
基板処理装置
17日前
キヤノン株式会社
画像形成装置
17日前
キヤノン株式会社
液体吐出ヘッド
17日前
キヤノン株式会社
液体吐出ヘッド
18日前
キヤノン株式会社
被認証装置及び方法
9日前
キヤノン株式会社
撮像装置及び移動体
17日前
キヤノン株式会社
検査装置及び検査方法
2日前
キヤノン株式会社
定着部材及び定着装置
17日前
キヤノン株式会社
学習装置および学習方法
4日前
キヤノン株式会社
管理システムおよび方法
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ