TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158826
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061724
出願日
2024-04-05
発明の名称
遠隔オペレータ端末
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/09 20060101AFI20251009BHJP(信号)
要約
【課題】複数種類の操作系を備える遠隔オペレータ端末を提供する。
【解決手段】対象モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末は、複数種類の操作系と、ユーザインタフェースと、複数種類の操作系のうち対象操作系のキャリブレーションを行うように構成された制御装置と、を備える。キャリブレーションにおいて、制御装置は、対象操作系に対してアクションを行うことを促す通知をユーザインタフェースを通して遠隔オペレータに提示する。そして、制御装置は、アクションの内容、あるいは、アクションの最中の対象操作系の状態に基づいて、対象操作系のゼロ点あるいは最大操作点を設定する。
【選択図】図11
特許請求の範囲
【請求項1】
対象モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末であって、
複数種類の操作系と、
ユーザインタフェースと、
前記複数種類の操作系のうち対象操作系のキャリブレーションを行うように構成された制御装置と
を備え、
前記キャリブレーションにおいて、前記制御装置は、
前記対象操作系に対して第1アクションを行うことを促す第1通知を前記ユーザインタフェースを通して前記遠隔オペレータに提示し、
前記第1アクションの内容、あるいは、前記第1アクションの最中の前記対象操作系の状態に基づいて、前記対象操作系のゼロ点を設定する
ように構成された
遠隔オペレータ端末。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の遠隔オペレータ端末であって、
前記対象操作系は、物理的に動かすことができる操作部材を含み、
前記操作部材の位置が前記遠隔操作の際の操作量に反映され、
前記第1アクションは、前記操作部材の前記位置を所望のゼロ点にしたまま所定時間維持することであり、
前記制御装置は、前記第1アクションの最中の前記操作部材の前記位置に基づいて前記操作部材の前記ゼロ点を設定する
遠隔オペレータ端末。
【請求項3】
請求項1に記載の遠隔オペレータ端末であって、
前記対象操作系は、前記遠隔オペレータの視線方向を計測する視線計測装置を含み、
前記遠隔オペレータの前記視線方向の変化が前記遠隔操作の際の操作量に反映され、
前記第1アクションは、前記視線方向を所望のゼロ点にしたまま所定時間維持することであり、
前記制御装置は、前記第1アクションの最中の前記視線方向に基づいて前記視線計測装置の前記ゼロ点を設定する
遠隔オペレータ端末。
【請求項4】
請求項1に記載の遠隔オペレータ端末であって、
前記対象操作系は、携帯端末を含み、
前記携帯端末の傾きが前記遠隔操作の際の操作量に反映され、
前記第1アクションは、前記携帯端末の前記傾きを所望のゼロ点にしたまま所定時間維持することであり、
前記制御装置は、前記第1アクションの最中の前記携帯端末の前記傾きに基づいて前記携帯端末の前記ゼロ点を設定する
遠隔オペレータ端末。
【請求項5】
請求項1に記載の遠隔オペレータ端末であって、
前記キャリブレーションにおいて、前記制御装置は、更に
前記対象操作系に対して第2アクションを行うことを促す第2通知を前記ユーザインタフェースを通して前記遠隔オペレータに提示し、
前記第2アクションの内容、あるいは、前記第2アクションの最中の前記対象操作系の状態に基づいて、前記対象操作系の最大操作点を設定する
ように構成された
遠隔オペレータ端末。
【請求項6】
請求項5に記載の遠隔オペレータ端末であって、
前記対象操作系は、物理的に動かすことができる操作部材を含み、
前記操作部材の位置が前記遠隔操作の際の操作量に反映され、
前記第2アクションは、前記操作部材の前記位置を所望の最大操作点まで動かすことであり、
前記制御装置は、前記第2アクションの最中の前記操作部材の最大変位に基づいて前記操作部材の前記最大操作点を設定する
遠隔オペレータ端末。
【請求項7】
請求項5に記載の遠隔オペレータ端末であって、
前記対象操作系は、前記遠隔オペレータの視線方向を計測する視線計測装置を含み、
前記遠隔オペレータの前記視線方向の変化が前記遠隔操作の際の操作量に反映され、
前記第2アクションは、前記視線方向を所望の最大操作点まで動かすことであり、
前記制御装置は、前記第2アクションの最中の前記視線方向の最大変位に基づいて前記視線計測装置の前記最大操作点を設定する
遠隔オペレータ端末。
【請求項8】
請求項5に記載の遠隔オペレータ端末であって、
前記対象操作系は、携帯端末を含み、
前記携帯端末の傾きが前記遠隔操作の際の操作量に反映され、
前記第2アクションは、前記携帯端末の前記傾きを所望の最大操作点まで変化させることであり、
前記制御装置は、前記第2アクションの間の前記携帯端末の前記傾きの最大変化に基づいて前記携帯端末の前記最大操作点を設定する
遠隔オペレータ端末。
【請求項9】
請求項1乃至8のいずれか一項に記載の遠隔オペレータ端末であって、
前記対象操作系は、前記複数種類の操作系のうち前記遠隔操作のために選択された第1操作系である
遠隔オペレータ端末。
【請求項10】
対象モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末であって、
複数種類の操作系と、
ユーザインタフェースと、
前記複数種類の操作系のうち対象操作系のキャリブレーションを行うように構成された制御装置と
を備え、
前記キャリブレーションにおいて、前記制御装置は、
前記対象操作系に対して第2アクションを行うことを促す第2通知を前記ユーザインタフェースを通して前記遠隔オペレータに提示し、
前記第2アクションの内容、あるいは、前記第2アクションの最中の前記対象操作系の状態に基づいて、前記対象操作系の最大操作点を設定する
ように構成された
遠隔オペレータ端末。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、車両の遠隔運転のための遠隔運転装置を開示している。遠隔運転装置の装備の状態が車両の装置の状態と一致しない場合、車両の遠隔運転が禁止される。
【先行技術文献】
【特許文献】
【0003】
特開2019-174993号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
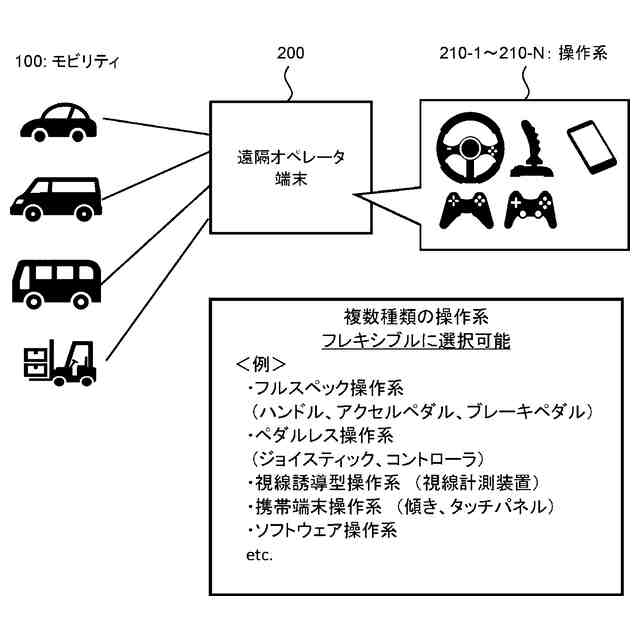
対象モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末について考える。単一の遠隔オペレータ端末に複数種類の操作系が搭載される場合については従来検討されていなかった。また、操作系の種類によっては、ゼロ点(N点)が一意に定まらない可能性があった。
【課題を解決するための手段】
【0005】
第1の観点は、対象モビリティの遠隔操作のために遠隔オペレータによって使用される遠隔オペレータ端末に関する。
遠隔オペレータ端末は、
複数種類の操作系と、
ユーザインタフェースと、
複数種類の操作系のうち対象操作系のキャリブレーションを行うように構成された制御装置と
を備える。
キャリブレーションにおいて、制御装置は、対象操作系に対してアクションを行うことを促す通知をユーザインタフェースを通して遠隔オペレータに提示する。そして、制御装置は、アクションの内容、あるいは、アクションの最中の対象操作系の状態に基づいて、対象操作系のゼロ点あるいは最大操作点を設定する。
【発明の効果】
【0006】
本開示によれば、単一の遠隔オペレータ端末が、複数種類の操作系を備える。更に、遠隔オペレータ端末は、遠隔オペレータが所望の対象操作系のキャリブレーション(カスタマイズ)を行うことができるように構成される。これにより、遠隔オペレータにとって操作系の使い勝手が良くなる。
【図面の簡単な説明】
【0007】
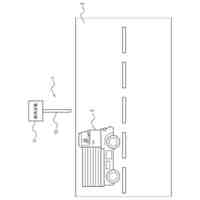
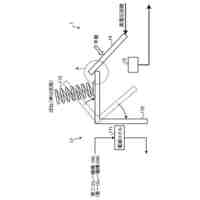
遠隔操作システムの概要を説明するための概念図である。
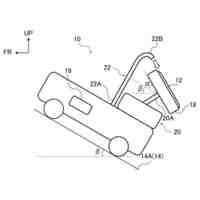
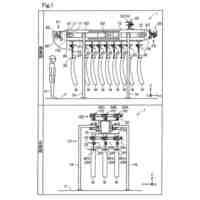
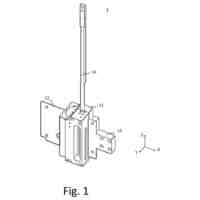
遠隔オペレータ端末に備わる複数種類の操作系の例を説明するための概念図である。
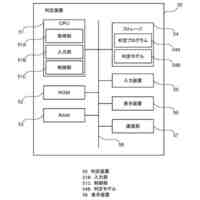
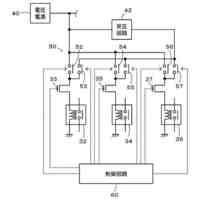
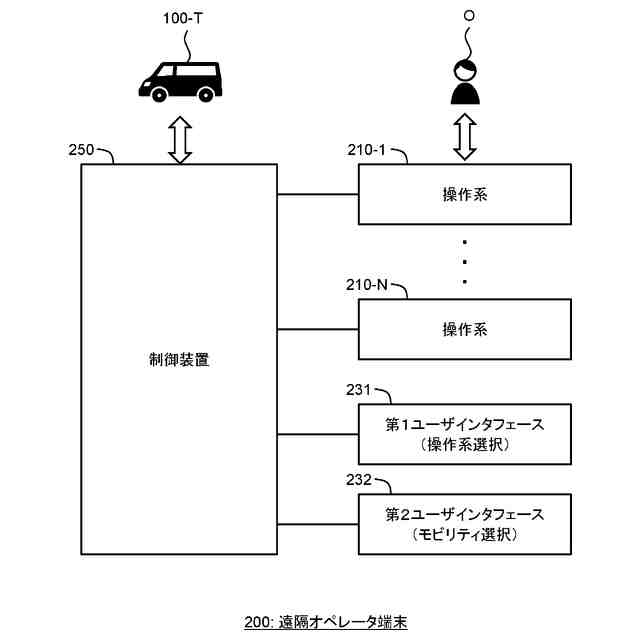
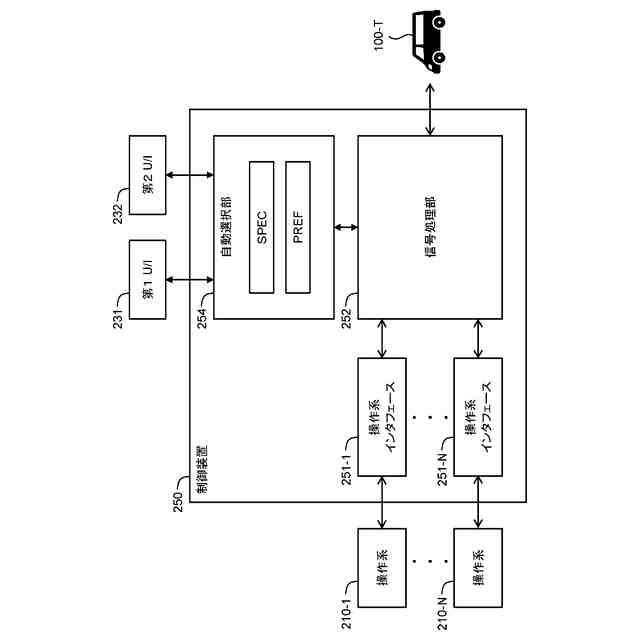
遠隔オペレータ端末の構成例を示すブロック図である。
遠隔操作に使用する第1操作系の手動選択に関連する機能構成例を示すブロック図である。
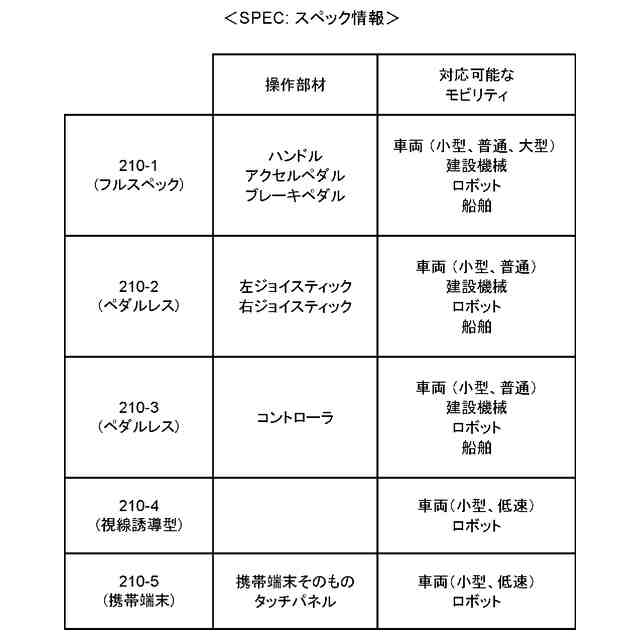
スペック情報の一例を示す図である。
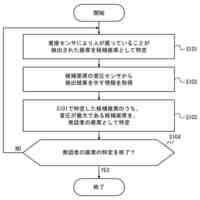
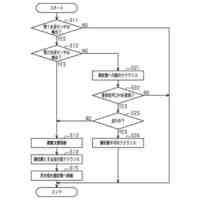
遠隔オペレータ端末の選択制御部による処理の一例を示すフローチャートである。
遠隔オペレータ端末の選択制御部による処理の他の例を示すフローチャートである。
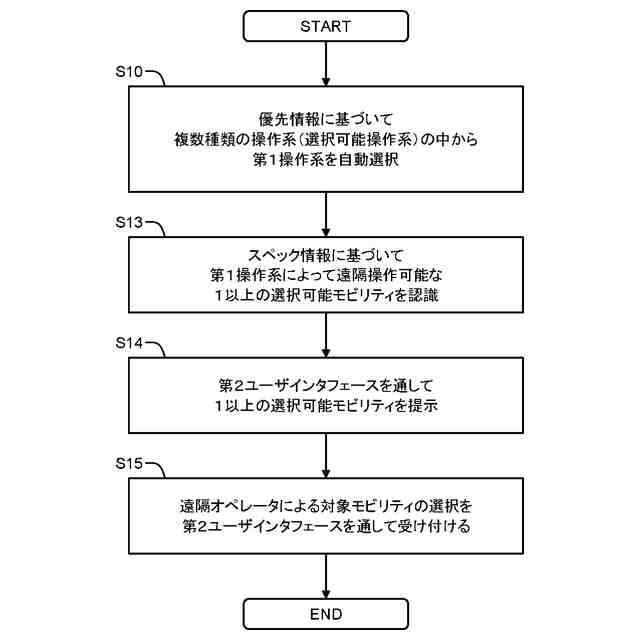
遠隔操作に使用する第1操作系の自動選択に関連する機能構成例を示すブロック図である。
遠隔オペレータ端末の自動選択部による処理の一例を示すフローチャートである。
遠隔オペレータ端末の自動選択部による処理の他の例を示すフローチャートである。
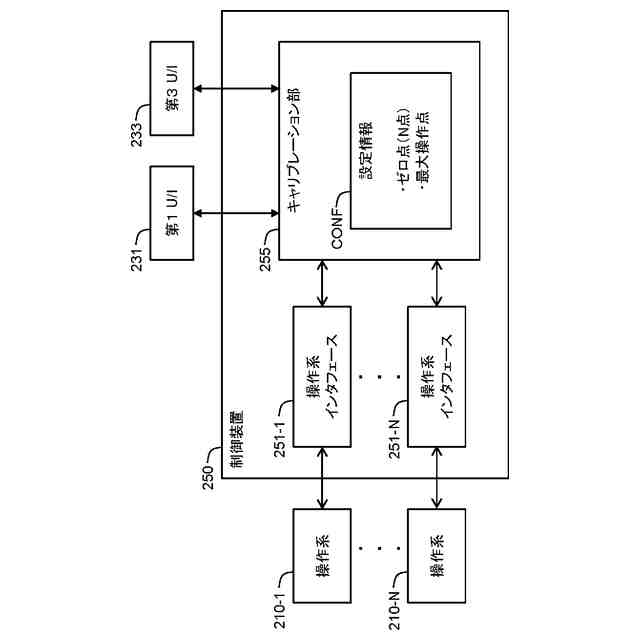
操作系のキャリブレーションに関連する構成例を示すブロック図である。
操作系のゼロ点設定の例を説明するための概念図である。
操作系の最大操作点設定の例を説明するための概念図である。
エンド通知に関連する機能構成例を示すブロック図である。
エンド通知の第1の例を説明するための概念図である。
エンド通知の第2の例を説明するための概念図である。
エンド通知の第3の例を説明するための概念図である。
遠隔オペレータ端末の構成例を示すブロック図である。
【発明を実施するための形態】
【0008】
添付図面を参照して、本開示の実施の形態を説明する。
【0009】
1.遠隔操作システムの概要
図1は、本実施の形態に係る遠隔操作システム1の概要を説明するための概念図である。遠隔操作システム1は、モビリティ100の遠隔操作のためのシステムである。遠隔操作は遠隔運転を含む概念である。遠隔操作システム1は、モビリティ100、遠隔オペレータ端末200、及び管理システム300を含んでいる。
【0010】
モビリティ100は、移動可能な移動体である。モビリティ100は、モビリティ100に搭乗したオペレータによって手動で操作されてもよい。モビリティ100は、自律移動機能を備えていてもよい。いずれの場合であっても、モビリティ100は、必要に応じて遠隔でも操作され得るように構成される。すなわち、モビリティ100が、遠隔操作システム1による遠隔操作の対象である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
椅子
8日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
車体
1日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
固定子
13日前
トヨタ自動車株式会社
飛行体
5日前
トヨタ自動車株式会社
加熱器
12日前
トヨタ自動車株式会社
電磁弁
8日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
判定装置
8日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
乾燥装置
5日前
トヨタ自動車株式会社
路側装置
14日前
トヨタ自動車株式会社
塗工装置
13日前
トヨタ自動車株式会社
製造方法
5日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
電源装置
5日前
トヨタ自動車株式会社
バッテリ
13日前
トヨタ自動車株式会社
搬送装置
5日前
トヨタ自動車株式会社
車両構造
12日前
トヨタ自動車株式会社
二次電池
13日前
トヨタ自動車株式会社
制御装置
12日前
トヨタ自動車株式会社
製造装置
13日前
トヨタ自動車株式会社
監視装置
13日前
トヨタ自動車株式会社
端末装置
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ