TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144333
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024044069
出願日
2024-03-19
発明の名称
検出装置、検出方法及びプログラム
出願人
古河電気工業株式会社
,
古河AS株式会社
代理人
個人
,
個人
主分類
G01S
13/89 20060101AFI20250925BHJP(測定;試験)
要約
【課題】GNSS等により移動体の位置情報の取得が不安定な環境においても、環境要因に影響されず、樹木の幹部分を安定的かつ高い精度で推定することができる検出装置、検出方法及びプログラムを提供すること。
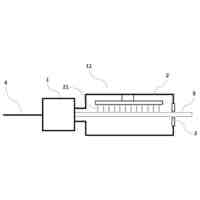
【解決手段】検出装置1は、移動体2の周囲環境に向けて送信波を送信するとともに、移動体2の周囲環境に存在する物標からの反射波を受信し、当該反射波を処理することによって、移動体2の周囲の点群の情報を周期的に取得するレーダ装置10と、レーダ装置10によって取得された点群の情報に基づいて、樹木の幹部分の位置を推定する幹部位置推定部235と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の周囲環境に向けて送信波を送信するとともに、前記移動体の周囲環境に存在する物標からの反射波を受信し、当該反射波を処理することによって、前記移動体の周囲の点群の情報を周期的に取得するレーダ処理部と、
前記レーダ処理部によって取得された前記点群の情報に基づいて、樹木の幹部分の位置を推定する推定部と、
を備える検出装置。
続きを表示(約 1,500 文字)
【請求項2】
前記推定部は、前記レーダ処理部によって取得された前記点群の高さ情報又は前記点群の強度に関する情報に基づいて、前記樹木の幹部分の位置を推定する、請求項1に記載の検出装置。
【請求項3】
前記点群の情報を蓄積する蓄積部と、
前記蓄積部によって蓄積された前記点群の情報をフィルタ処理するフィルタ部と、
を更に備え、
前記フィルタ部は、前記レーダ処理部によって取得された前記点群の強度に関する情報、前記点群の振幅情報、前記点群の速度情報及び前記点群の三次元位置情報の少なくとも1つに対して前記点群の情報をフィルタ処理することによって、前記樹木以外の他の物標の点群の情報を除去し、
前記推定部は、フィルタ処理された前記点群の情報に基づいて、前記樹木の幹部分の位置を推定する、
請求項1又は2に記載の検出装置。
【請求項4】
前記フィルタ部によってフィルタ処理された前記点群の情報をクラスタリング処理し、1以上のクラスタに分類するクラスタリング部を更に備える、請求項3に記載の検出装置。
【請求項5】
前記推定部は、
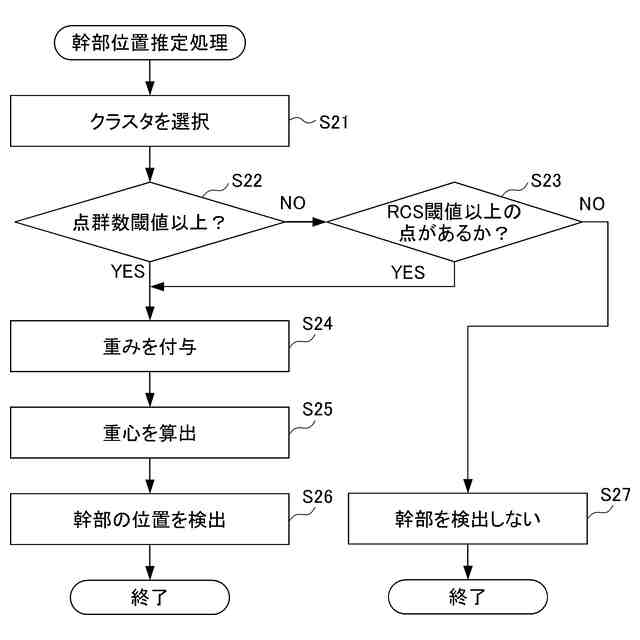
前記クラスタリング部によって分類された前記1以上のクラスタのうちの1つのクラスタを選択し、
選択した前記1つのクラスタにおける前記点群の数及び前記点群の強度に関する情報を用いて、前記樹木の幹部分の位置を推定する、請求項4に記載の検出装置。
【請求項6】
前記推定部は、
少なくとも前記点群の高さ情報又は前記点群の強度に関する情報を用いて前記点群の情報に重みを付与し、
重みを付与した前記点群の情報について重み付き重心を算出し、
算出した前記重み付き重心を前記樹木の幹部分の位置であると推定する、請求項5に記載の検出装置。
【請求項7】
前記点群の強度に関する情報は、入射される前記送信波に対する前記物標の反射能力を示すRCS(Radar Cross Section)であり、
前記推定部は、前記点群の高さ情報及び前記RCSを用いて前記点群の情報に重みを付与し、前記RCSが相対的に大きい値である場合、及び前記点群の高さ情報における検出高さが相対的に低い値である場合、前記点群の情報に付与する重みを大きくする、請求項6に記載の検出装置。
【請求項8】
前記推定部によって推定された結果に基づいて前記移動体の走行を制御する走行制御部を更に備える請求項1又は2に記載の検出装置。
【請求項9】
物標を検出するためのレーダ処理部と、検出された前記物標から特定の物標の位置を推定するための推定部とを備えた検出装置により、
移動体の周囲環境に向けて送信波を送信するとともに、前記移動体の周囲環境に存在する物標からの反射波を受信し、当該反射波を処理することによって、前記移動体の周囲の点群の情報を周期的に取得するステップと、
前記レーダ処理部によって取得された前記点群の情報に基づいて、樹木の幹部分の位置を推定するステップと、
を備える検出方法。
【請求項10】
コンピュータに、
移動体の周囲環境に向けて送信波を送信するとともに、前記移動体の周囲環境に存在する物標からの反射波を受信し、当該反射波を処理することによって、前記移動体の周囲の点群の情報を周期的に取得するステップと、
取得された前記点群の情報に基づいて、樹木の幹部分の位置を推定するステップと、
を実行させるコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検出装置、検出方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
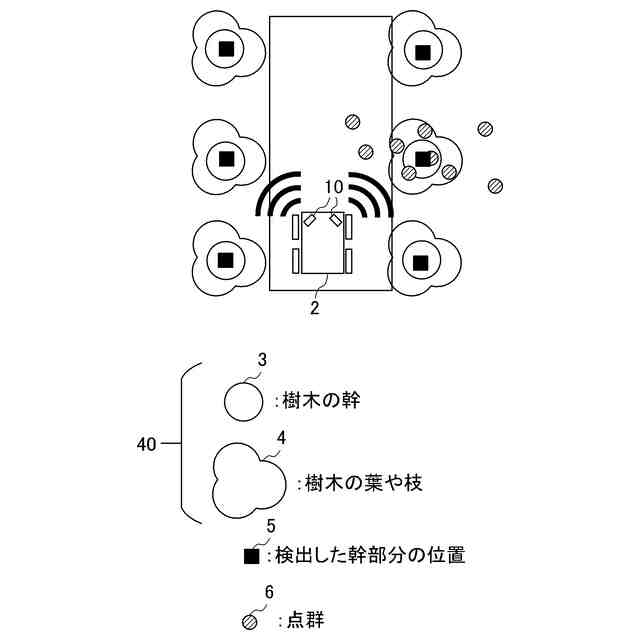
従来より、果樹園等にある樹木列の間を自律走行する移動体に関する技術が知られている。特に、GNSS(Global Navigation Satellite System)等によって移動体の位置情報を取得することが不安定な環境においては、移動体と樹木の距離を計測し、移動体が樹木に接触しないように自律走行の制御を行うことによって、移動体の走行安定性を高めている。例えば、特許文献1には、GNSSを利用できない環境において、移動体の周囲の環境における物体の分布を示すセンサデータを出力する1つ以上のLiDAR(Light Detection And Ranging)センサと、複数の樹木列の幹部の分布を示す環境地図データを記憶する記憶装置と、移動体が移動している間に1つ以上のLiDARセンサから繰り返し出力されるセンサデータに基づいて、移動体の周囲の環境における樹木列の幹部を検出し、検出した樹木列の幹部と環境地図データとのマッチングを行うことにより、移動体の位置を推定する自己位置推定装置と、推定された移動体の位置に応じて移動体の移動を制御する制御装置と、を備える移動体が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/107586号
【発明の概要】
【発明が解決しようとする課題】
【0004】
LiDARは、波長が短いレーザ光を用いて計測を行うため、一般に、対象物との間に障害物が存在すると対象物の計測が困難となる。この点、特許文献1では、LiDARを樹木の幹の平均高さより低い位置に配置することにより、葉や枝によって遮られることなく、より多くのレーザビームで幹部を照射することができる、と記載されているが、平均高さより低い位置に配置しても葉や枝によって遮られる可能もあるし、地面から生えている雑草によって遮られることもある。また、LiDARを用いる場合、霧、砂埃といった環境要因によりレーザ光が散乱され、樹木の幹の検知を十分に精度よく行うことができないという課題もある。
【0005】
本願発明の一つの目的は、GNSS等により移動体の位置情報の取得が不安定な環境においても、環境要因に影響されず、樹木の幹部分を安定的かつ高い精度で推定することができる検出装置、検出方法及びプログラムを提供することである。
【課題を解決するための手段】
【0006】
上記の、及び他の目的を達成するために、本発明に係る検出装置は、移動体の周囲環境に向けて送信波を送信するとともに、前記移動体の周囲環境に存在する物標からの反射波を受信し、当該反射波を処理することによって、前記移動体の周囲の点群の情報を周期的に取得するレーダ処理部と、前記レーダ処理部によって取得された前記点群の情報に基づいて、樹木の幹部分の位置を推定する推定部と、を備える。
【0007】
前記推定部は、前記レーダ処理部によって取得された前記点群の高さ情報又は前記点群の強度に関する情報に基づいて、前記樹木の幹部分の位置を推定してもよい。
【0008】
前記検出装置は、前記点群の情報を蓄積する蓄積部と、前記蓄積部によって蓄積された前記点群の情報をフィルタ処理するフィルタ部と、を更に備え、前記フィルタ部は、前記レーダ処理部によって取得された前記点群の強度に関する情報、前記点群の振幅情報、前記点群の速度情報及び前記点群の三次元位置情報の少なくとも1つに対して前記点群の情報をフィルタ処理することによって、前記樹木以外の他の物標の点群の情報を除去し、前記推定部は、フィルタ処理された前記点群の情報に基づいて、前記樹木の幹部分の位置を推定してもよい。
【0009】
前記検出装置は、前記フィルタ部によってフィルタ処理された前記点群の情報をクラスタリング処理し、1以上のクラスタに分類するクラスタリング部を更に備えてもよい。
【0010】
前記推定部は、前記クラスタリング部によって分類された前記1以上のクラスタのうちの1つのクラスタを選択し、選択した前記1つのクラスタにおける前記点群の数及び前記点群の強度に関する情報を用いて、前記樹木の幹部分の位置を推定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
古河電気工業株式会社
端子
4日前
古河電気工業株式会社
端子
3日前
古河電気工業株式会社
回路基板
10日前
古河電気工業株式会社
回路基板
7日前
古河電気工業株式会社
回路基板
7日前
古河電気工業株式会社
排水構造
10日前
古河電気工業株式会社
電気接続箱
10日前
古河電気工業株式会社
複合ケーブル
4日前
古河電気工業株式会社
複合ケーブル
5日前
古河電気工業株式会社
複合ケーブル
10日前
古河電気工業株式会社
複合ケーブル
4日前
古河電気工業株式会社
コネクタ接続構造
3日前
古河電気工業株式会社
光半導体モジュール
3日前
古河電気工業株式会社
電子部品加工用テープ
3日前
古河電気工業株式会社
レーダ装置の配置構造
3日前
古河電気工業株式会社
ウエハ加工用粘着テープ
4日前
古河電気工業株式会社
フラットケーブル組立体
3日前
古河電気工業株式会社
光モジュール、光接続構造
4日前
古河電気工業株式会社
レーザ装置および制御方法
3日前
古河電気工業株式会社
ワイヤハーネス用コネクタ
3日前
古河電気工業株式会社
バッテリーポスト端子組立体
10日前
古河電気工業株式会社
配線材、及び配線材の製造方法
5日前
古河電気工業株式会社
半導体ウェハ表面保護用テープ
3日前
古河電気工業株式会社
コネクタ及びコネクタ接続構造
3日前
古河電池株式会社
双極型蓄電池
4日前
古河電気工業株式会社
ポリオレフィン樹脂組成物及び配線材
5日前
古河樹脂加工株式会社
木質配合樹脂管
3日前
古河電気工業株式会社
通信システム、プログラム及び通信方法
4日前
古河電気工業株式会社
通信システム、プログラム及び通信方法
5日前
古河電気工業株式会社
通信システム、プログラム及び通信方法
5日前
古河電気工業株式会社
樹脂組成物及びこれを用いた射出成型体
5日前
古河電気工業株式会社
フェルールホルダ、光接続構造、光モジュール
4日前
古河電気工業株式会社
走行路認識装置、走行路認識方法及びプログラム
5日前
古河電気工業株式会社
配線材の製造方法及び製造装置、並びに、配線材
5日前
古河電気工業株式会社
配線材の製造方法及び製造装置、並びに、配線材
5日前
古河電気工業株式会社
センサシステム、センシング方法およびプログラム
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ