TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141888
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2025038120
出願日
2025-03-11
発明の名称
妥当性確認メトリクスを決定するコンピュータ実装方法
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
,
個人
,
個人
主分類
G06F
11/36 20250101AFI20250919BHJP(計算;計数)
要約
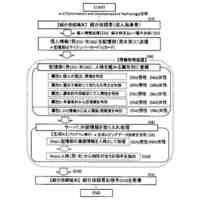
【課題】妥当性確認メトリクスを決定するコンピュータ実装方法を提供すること。
【解決手段】モデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法に関する。この方法は、シミュレーションの結果を含む第1のデータシリーズを受信するステップと、測定の結果を含む第2のデータシリーズを受信するステップと、第1のデータシリーズの評定を得るために、第2のデータシリーズとの比較に基づく第1のデータシリーズの視覚的妥当性確認を受信するステップと、第1のデータシリーズおよび第2のデータシリーズに複数の所定のメトリクスを適用するステップ、ならびに前提条件に基づいて複数のメトリクスから1つまたは複数のメトリクスを選択するステップと、選択された1つまたは複数のメトリクスを使用したパラメータの最適化、および第1のデータシリーズの評定に基づいて、妥当性確認メトリクスを決定するステップとを含む。
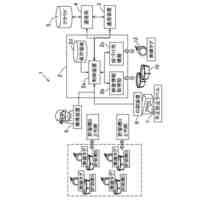
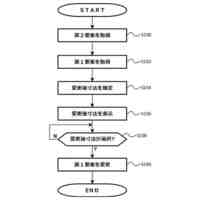
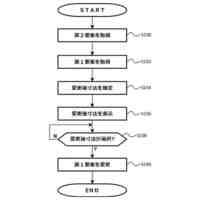
【選択図】図4
特許請求の範囲
【請求項1】
モデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法(100)であって、
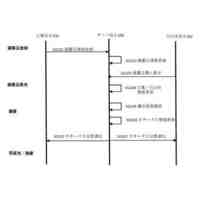
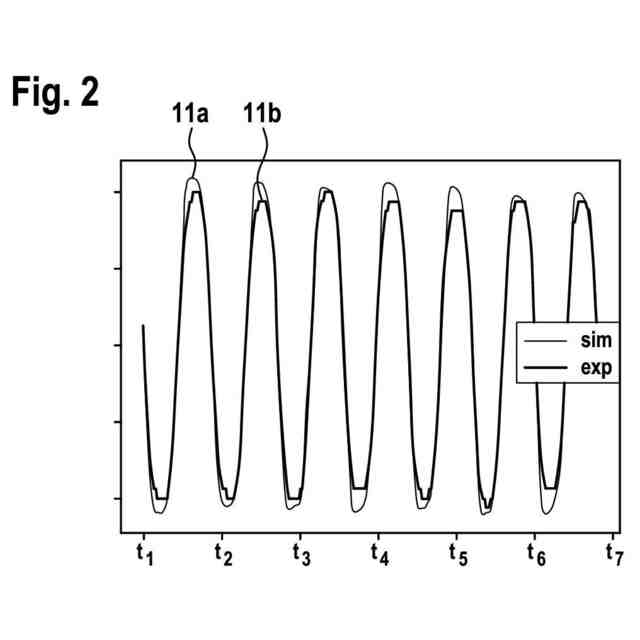
シミュレーションの結果を含む第1のデータシリーズ(11a)を受信するステップ(110)と、
測定の結果を含む第2のデータシリーズ(11b)を受信するステップ(120)と、
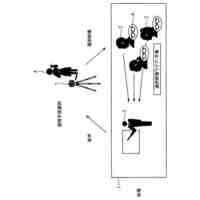
前記第1のデータシリーズ(11a)の評定を得るために、前記第2のデータシリーズ(11b)との比較に基づく前記第1のデータシリーズの視覚的妥当性確認を受信するステップ(130)と、
前記第1のデータシリーズ(11a)および前記第2のデータシリーズ(11b)に複数の所定のメトリクスを適用するステップ(140)、ならびに前提条件に基づいて前記複数のメトリクスから1つまたは複数のメトリクスを選択するステップ(150)と、
前記選択された1つまたは複数のメトリクスを使用したパラメータの決定、および前記第1のデータシリーズの評定に基づいて、妥当性確認メトリクスを決定するステップ(160)と
を含むコンピュータ実装方法(100)。
続きを表示(約 1,300 文字)
【請求項2】
前記妥当性確認メトリクスが、1つまたは複数の加数の合計を含み、前記1つまたは複数の加数が重み付けされ、最適化されたパラメータが、前記加数の前記重みを含み、前記加数が、前記1つまたは複数のメトリクスを含む、請求項1に記載のコンピュータ実装方法(100)。
【請求項3】
前記妥当性確認メトリクスを決定するステップ(160)が、回帰曲線の計算を含み、前記第1のデータシリーズ(11a)の前記評定が、前記回帰曲線の従属変数を含み、前記回帰曲線の独立変数が前記パラメータを含む、請求項1または2に記載のコンピュータ実装方法(100)。
【請求項4】
前記視覚的妥当性確認が、評価区間に基づき、前記第1のデータシリーズ(11a)の前記評定が、複数のエントリを有するベクトルを含み、各エントリが、専門家(12)の評価を含み、ベクトルの各エントリが、前記評価区間からの値を含む、請求項1、2、または3に記載のコンピュータ実装方法(100)。
【請求項5】
前記複数のメトリクスから前記1つまたは複数のメトリクスを選択する前記ステップ(150)、および前記妥当性確認メトリクスを決定する前記ステップが、LASSO回帰によって実行される、請求項1から4のいずれか一項に記載のコンピュータ実装方法(100)。
【請求項6】
前記第1のデータシリーズ(11a)および/または前記第2のデータシリーズ(11b)を1つまたは複数のセクションに分割するステップを含み、前記複数の所定のメトリクスが、前記それぞれのデータシリーズ(11a、11b)のセクションの長さを含む、
請求項1から5のいずれか一項に記載のコンピュータ実装方法(100)。
【請求項7】
前記複数の所定のメトリクスが、平均絶対誤差、平均二乗偏差、中央絶対偏差、相互相関、正規化平均二乗偏差、および/またはスプレーグギアーズのうちの少なくとも1つを含む、請求項1から6のいずれか一項に記載のコンピュータ実装方法(100)。
【請求項8】
前記妥当性確認メトリクスを使用して新たなシミュレーションを妥当性確認するステップを含み、前記新たなシミュレーションが、車両機能、ロボット機能、建物オートメーション機能、電動工具オートメーション機能、および/または家電機器オートメーション機能のシミュレーションを含む、
請求項1から7のいずれか一項に記載のコンピュータ実装方法(100)。
【請求項9】
請求項1から8のいずれか一項に記載のモデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法(100)を実行するように構成されたコンピュータシステム。
【請求項10】
コンピュータシステムによるコンピュータプログラムの実行時に、請求項1から8のいずれか一項に記載のモデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法(100)を前記コンピュータシステムに実行させる命令を含むコンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル品質を決定するための妥当性確認メトリクスを決定する方法に関する。さらに、本発明は、対応するコンピュータシステム、対応するコンピュータプログラム、および対応するコンピュータ可読媒体または信号に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えばロボット工学および自動車の分野において、高度自動化されたシステムまたは自律システムがますます注目されている。
自律運転などの技術の開発では、シミュレーションおよびモデルが重要な役割を果たす。それらは、物理的なテストセットアップに必ずしも依拠せずにデータを収集できるようにする。高度なシミュレーションソフトウェアによって、複雑なシナリオを仮想環境で模倣することができ、これは、現実世界では再現が難しいことがある多数のテストケースを網羅する。仮想テストにより、エンジニアは、費用および時間のかかる物理テストを実行する必要なく、様々なアルゴリズム、センサ構成、および運転シナリオを効率的に評定および最適化することができるようになる。このようにして、シミュレーションおよびモデルは、開発プロセスを加速させ、自律車両の安全性および信頼性に寄与する。
【0003】
モデル、測定方法、およびテスト方法に関する品質基準として、信頼性および客観性に加えて、特に妥当性が利用される。ここで、技術プロセスをシミュレートするためのモデルに関連して、妥当性確認は、モデル構築中のサブプロセスを成す。この妥当性確認の対象は、シミュレーションがその使用目的に適しているかどうかという、品質保証の枠組での中心的な質問に答えることである。妥当性確認プロセスによってはじめて、シミュレーション結果が現実を反映している、または使用目的に適している、およびさらなる製品開発段階に利用することができるという、必要な品質証明がもたらされる。
【0004】
この文脈で、いわゆる運用妥当性確認が、実行可能なシミュレーションモデルの品質評価に使用され、これは仮想車両の挙動を現実の車両の挙動と直接比較するので、例えば車両技術において実用上、非常に重要性を有する。それを実行するために、シミュレーションの基礎となり、非常に複雑であり得る概念モデルを知ることは必要ない。運用妥当性確認は、シミュレーションデータと測定データとの実験的な比較に基づくので、多様なシミュレーションモデルおよびツールに適用可能である。
【発明の概要】
【0005】
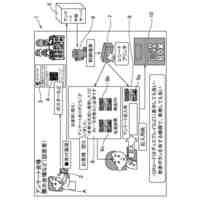
本開示の第1の全般的な態様は、コンピュータ実装方法に関する。この方法は、シミュレーションの結果を含む第1のデータシリーズを受信するステップと、測定の結果を含む第2のデータシリーズを受信するステップと、第1のデータシリーズの評定を得るために、第2のデータシリーズとの比較に基づく第1のデータシリーズの視覚的妥当性確認を受信するステップと、第1のデータシリーズおよび第2のデータシリーズに複数の所定のメトリクスを適用するステップ、ならびに前提条件に基づいて複数のメトリクスから1つまたは複数のメトリクスを選択するステップと、選択された1つまたは複数のメトリクスを使用したパラメータの最適化、および第1のデータシリーズの評定に基づいて、妥当性確認メトリクスを決定するステップとを含む。
【0006】
本開示の第2の全般的な態様は、第1の全般的な態様(またはその実施形態)によるモデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法を実行するように構成されたコンピュータシステムに関する。
【0007】
本開示の第3の全般的な態様は、第1の全般的な態様(またはその実施形態)によるモデル品質を決定するための妥当性確認メトリクスを決定するコンピュータ実装方法を実行するように構成されたコンピュータプログラムに関する。
【0008】
本開示の第4の全般的な態様は、第3の全般的な態様(またはその実施形態)によるコンピュータプログラムを記憶するおよび/または含むコンピュータ可読媒体または信号に関する。
【0009】
本開示で提案される第1の全般的な態様(またはその実施形態)による方法は、モデル品質を決定するための妥当性確認メトリクスを決定するためのコンピュータ実装方法を提供するために使用することができる。この方法は、(シミュレーション)モデルの(比較可能な)品質を決定するために、客観的な妥当性確認メトリクスを提供するために使用することができる。例において、妥当性確認メトリクスは、データベースに記憶されることがあり、将来のシミュレーションを妥当性確認するために使用することができる。例において、妥当性確認メトリクスは、ウェブアプリを介して提供されることがあり、それによりスケーリングされることがある。開示される方法は、開発における物理的なテストベンチおよび/またはテストセットアップの必要性を減らし、製品開発におけるシミュレーションおよびモデルの使用を促進することを可能にすることができる。これは、開発時間を短縮するのに有利であり得る。さらなる例では、この方法は、関連するメトリクスを妥当性確認メトリクスに組み込ませ、例えば相関されたメトリクスを削除するために使用することができる。さらなる利点は、信頼区間を決定できることに見ることができ、信頼区間は、妥当性確認メトリクスをチェックするために使用することができ、例えば妥当性確認メトリクスの必要となり得る更新に関する情報を与えることができる。
【0010】
さらなる利点は、妥当性確認メトリクスによって妥当性確認されるモデルを、車両機能、ロボット機能、建物オートメーション機能、電動工具オートメーション機能、および/または家電機器オートメーション機能を開発、テスト、妥当性確認、および/または検証するために使用することができることにある。例において、データは、機械学習モデルを訓練、テスト、および/または妥当性確認するために使用することができる。さらなる利点は、機械学習モデルを使用して、車両機能、ロボット機能、建物オートメーション機能、電動工具オートメーション機能、および/または家電機器オートメーション機能を制御および/または調整することができることにあり得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
裁判のAI化
2か月前
個人
情報処理システム
2か月前
個人
フラワーコートA
1か月前
個人
工程設計支援装置
1か月前
個人
検査システム
2か月前
個人
冷凍食品輸出支援構造
26日前
個人
為替ポイント伊達夢貯
26日前
個人
介護情報提供システム
2か月前
個人
設計支援システム
2か月前
個人
設計支援システム
2か月前
個人
表変換編集支援システム
19日前
個人
携帯情報端末装置
1か月前
キヤノン電子株式会社
携帯装置
2か月前
個人
知財出願支援AIシステム
26日前
株式会社サタケ
籾摺・調製設備
2か月前
個人
結婚相手紹介支援システム
1か月前
個人
パスワード管理支援システム
19日前
株式会社カクシン
支援装置
2か月前
個人
行動時間管理システム
21日前
個人
AIによる情報の売買の仲介
28日前
株式会社アジラ
進入判定装置
1か月前
個人
パスポートレス入出国システム
1か月前
個人
システム及びプログラム
12日前
個人
アンケート支援システム
1か月前
個人
海外支援型農作物活用システム
11日前
個人
備蓄品の管理方法
2か月前
日本精機株式会社
施工管理システム
28日前
個人
AIキャラクター制御システム
19日前
サクサ株式会社
中継装置
1か月前
大同特殊鋼株式会社
疵判定方法
5日前
個人
食事受注会計処理システム
1か月前
個人
未来型家系図構築システム
11日前
個人
社会還元・施設向け供給支援構造
19日前
個人
人格進化型対話応答制御システム
19日前
サクサ株式会社
中継装置
2か月前
個人
ジェスチャーパッドのガイド部材
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ