TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136686
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035440
出願日
2024-03-08
発明の名称
作業機械の位置推定システム
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
G01B
11/00 20060101AFI20250911BHJP(測定;試験)
要約
【課題】視界の悪い環境又はGNSS衛星からの電波の受信状態が悪い環境の作業現場において、作業機械の作業現場での位置を精度良く且つ安定的に推定することを目的とする。
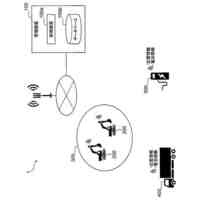
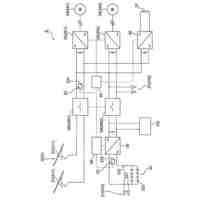
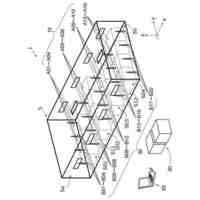
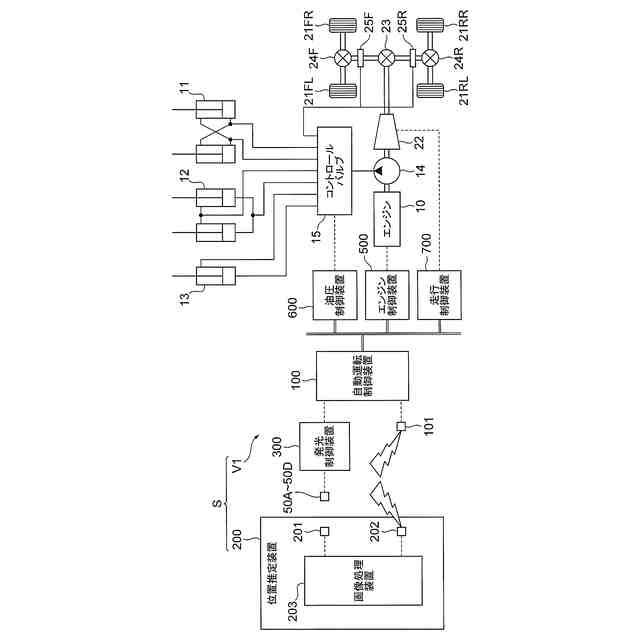
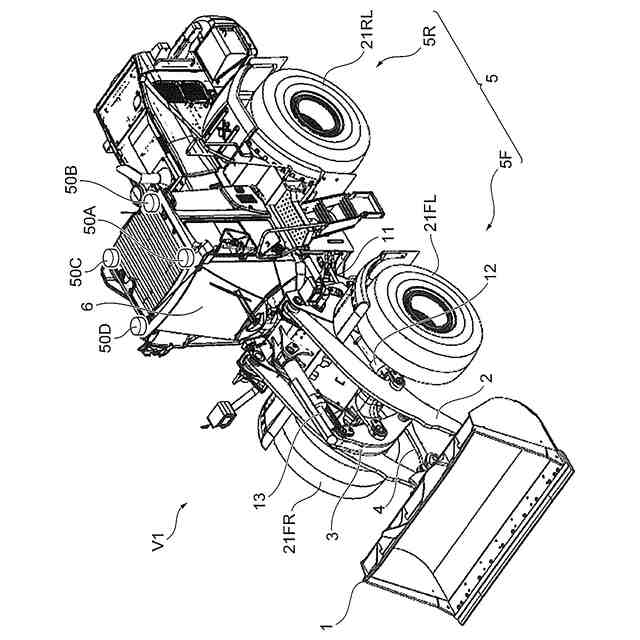
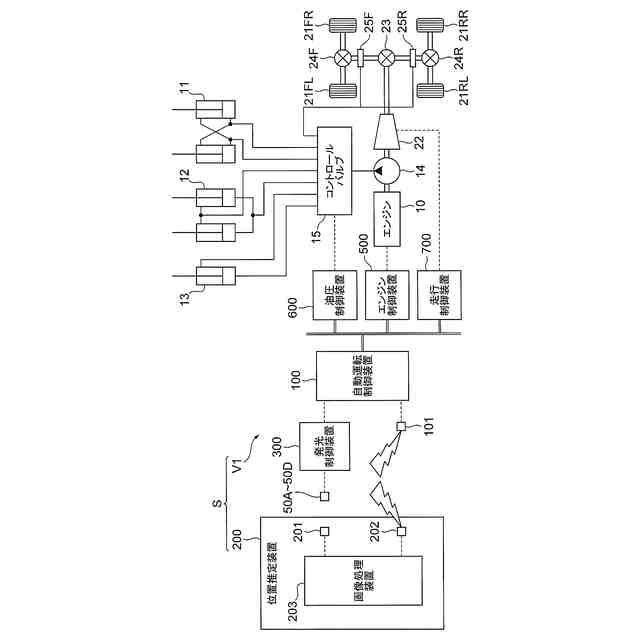
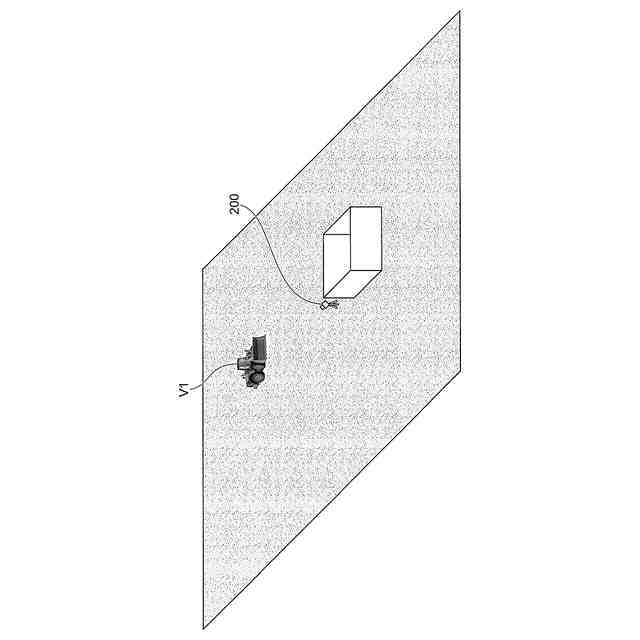
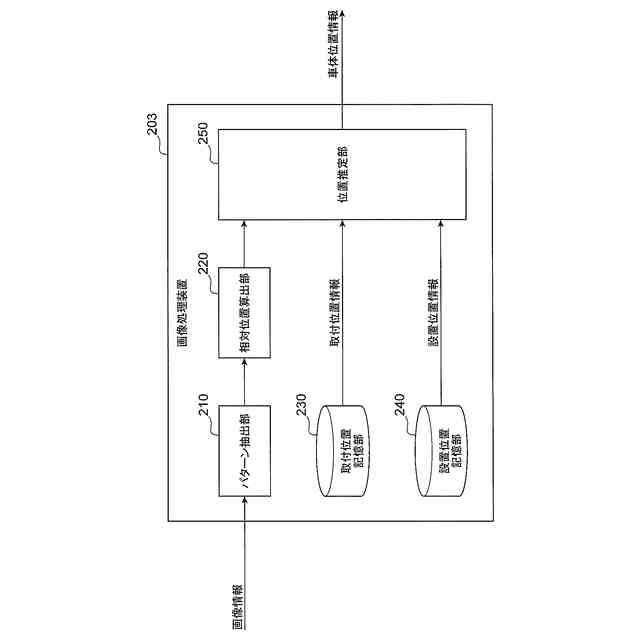
【解決手段】位置推定システムSは、作業機械V1と、作業現場に配置される位置推定装置200とを含む。作業機械V1は、ランプ50A~50Dと発光制御装置300とを備える。位置推定装置200は、ランプ50A~50Dを撮像する撮像装置201と、撮像装置201によって取得された画像を処理する画像処理装置203を備える。画像処理装置203は、画像内の輝度変化パターンを抽出し、抽出されたパターンに基づいてランプ50A~50Dの画像内での相対位置を算出し、ランプ50A~50Dの画像内での相対位置と作業機械V1への取付位置と撮像装置201の作業現場での設置位置とに基づいて、作業機械V1の作業現場での位置を推定する。
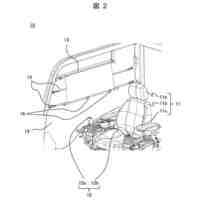
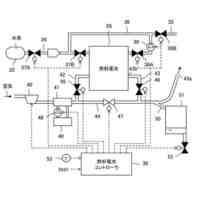
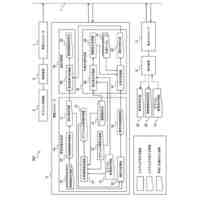
【選択図】図2
特許請求の範囲
【請求項1】
作業現場において稼働する作業機械と、前記作業現場に配置される位置推定装置と、を含む作業機械の位置推定システムであって、
前記作業機械は、前記作業機械の異なる位置に取り付けられた複数の発光体と、前記複数の発光体の発光を制御する発光制御装置と、を備え、
前記位置推定装置は、前記複数の発光体を撮像する撮像装置と、前記撮像装置によって取得された画像を処理する画像処理装置と、を備え、
前記発光制御装置は、前記複数の発光体の発光体毎で時系列的に異なる発光パターンによって前記複数の発光体の発光を制御し、
前記画像処理装置は、
前記複数の発光体を撮像した前記画像を構成する画素の輝度が時系列的に変化するパターンを前記画像から抽出し、
抽出された前記パターンに基づいて前記複数の発光体の前記画像内での相対位置を算出し、
算出された前記複数の発光体の前記画像内での前記相対位置と、予め記憶された前記複数の発光体の前記作業機械への取付位置と、前記撮像装置の前記作業現場での設置位置と、に基づいて、前記作業機械の前記作業現場での位置を推定する
ことを特徴とする作業機械の位置推定システム。
続きを表示(約 1,000 文字)
【請求項2】
前記作業機械に取り付けられる前記複数の発光体の数は、3つ以上である
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項3】
前記複数の発光体は、周辺に光を発して前記周辺に存在する物体との距離を測定する複数の測距装置によって構成され、
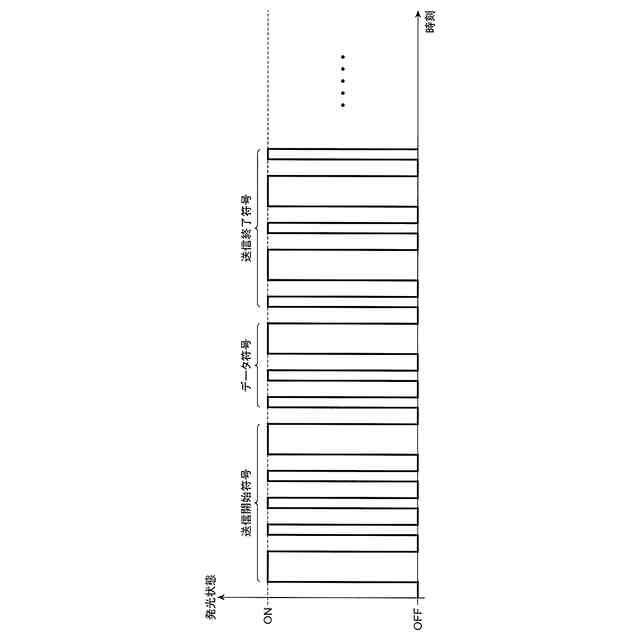
前記発光制御装置は、前記複数の測距装置が発光状態と発光停止状態とを繰り返す前記発光パターンであって、前記複数の測距装置が前記距離を測定する際の前記発光状態の持続時間よりも前記発光停止状態の持続時間が短い前記発光パターンによって、前記複数の測距装置の発光を制御する
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項4】
前記作業機械は、車体前部と車体後部とが屈曲するアーティキュレート型のホイールローダであり、
前記複数の発光体は、前記車体前部と前記車体後部のそれぞれに少なくとも3つずつ取り付けられる
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項5】
前記発光制御装置は、前記複数の発光体が発する光の強度を時系列的に変化させる前記発光パターンによって、前記複数の発光体の発光を制御する
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項6】
前記発光制御装置は、前記複数の発光体が発する光の波長を時系列的に変化させる前記発光パターンによって、前記複数の発光体の発光を制御する
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項7】
前記発光制御装置は、前記複数の発光体が発する光の偏光状態を時系列的に変化させる前記発光パターンによって、前記複数の発光体の発光を制御する
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
【請求項8】
前記位置推定装置は、前記作業現場において稼働する他の作業機械に設置され、
前記他の作業機械は、自己位置を検出する自己位置検出装置を備え、
前記位置推定装置は、前記自己位置検出装置によって検出された前記他の作業機械の前記自己位置を、前記撮像装置の前記作業現場での設置位置とする
ことを特徴とする請求項1に記載の作業機械の位置推定システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の位置推定システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から、作業現場において掘削作業及び積込作業を自律的に行う自動運転型の作業機械が提案されている。自動運転型の作業機械では、作業機械の作業現場における位置を精度良く推定することが重要である。
【0003】
作業機械の作業現場における位置を推定する技術としては、作業機械自体にGNSS(Global Navigation Satellite System)受信機等の自己位置を検出する装置を設置する技術の他、作業機械の外部に設置される装置との協働によって作業機械の位置を推定する技術が知られている。
【0004】
例えば、特許文献1には、目標物となるトラックに目印を設け、作業機械に設置された撮像装置によって目印を撮影して、目印の位置及び姿勢を算出することによって、作業機械の位置及び姿勢を推定する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-054072号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された技術では、暗所又は砂埃が舞う場所等の視界が悪い環境において適切な撮像が行えず、作業機械の位置を精度良く推定することが難しい。また、作業機械に設置されたGNSS受信機によって作業機械の位置を推定する技術では、地下又は周囲に遮蔽物が存在するような作業現場においてGNSS衛星からの電波を安定的に受信できなかったり、当該電波を受信できても位置推定精度が低かったりすることがある。更に、作業機械に設置された測距装置の測定結果から作業機械の位置を推定する技術では、作業現場によっては、作業機械の位置を推定する基準となる地形又は構造物が存在しないことがあり、当該位置を精度良く且つ安定的に推定する点で改善の余地がある。
【0007】
前述の事情に鑑みて、本発明は、視界の悪い環境又はGNSS衛星からの電波の受信状態が悪い環境の作業現場において、作業機械の作業現場での位置を精度良く且つ安定的に推定することを目的とする。
【課題を解決するための手段】
【0008】
前述の課題を解決するために、本発明の作業機械の位置推定システムは、作業現場において稼働する作業機械と、前記作業現場に配置される位置推定装置と、を含む作業機械の位置推定システムであって、前記作業機械は、前記作業機械の異なる位置に取り付けられた複数の発光体と、前記複数の発光体の発光を制御する発光制御装置と、を備え、前記位置推定装置は、前記複数の発光体を撮像する撮像装置と、前記撮像装置によって取得された画像を処理する画像処理装置と、を備え、前記発光制御装置は、前記複数の発光体の発光体毎で時系列的に異なる発光パターンによって前記複数の発光体の発光を制御し、前記画像処理装置は、前記複数の発光体を撮像した前記画像を構成する画素の輝度が時系列的に変化するパターンを前記画像から抽出し、抽出された前記パターンに基づいて前記複数の発光体の前記画像内での相対位置を算出し、算出された前記複数の発光体の前記画像内での前記相対位置と、予め記憶された前記複数の発光体の前記作業機械への取付位置と、前記撮像装置の前記作業現場での設置位置と、に基づいて、前記作業機械の前記作業現場での位置を推定することを特徴とする。
【発明の効果】
【0009】
本発明によれば、視界の悪い環境又はGNSS衛星からの電波の受信状態が悪い環境の作業現場において、作業機械の作業現場での位置を精度良く且つ安定的に推定することができる。
【図面の簡単な説明】
【0010】
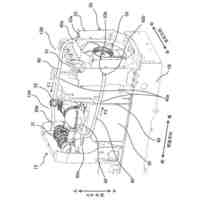
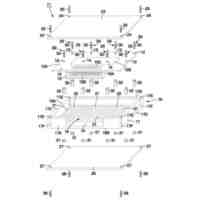
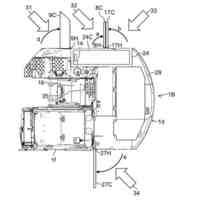
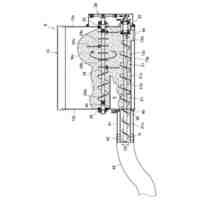
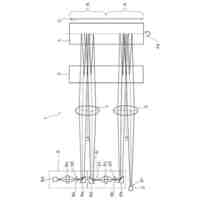
第1実施形態に係る作業機械の外観を模式的に示す図。
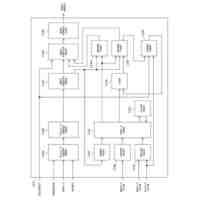
第1実施形態に係る位置推定システムの構成を示す図。
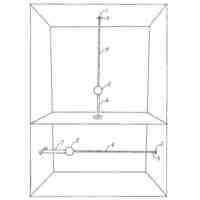
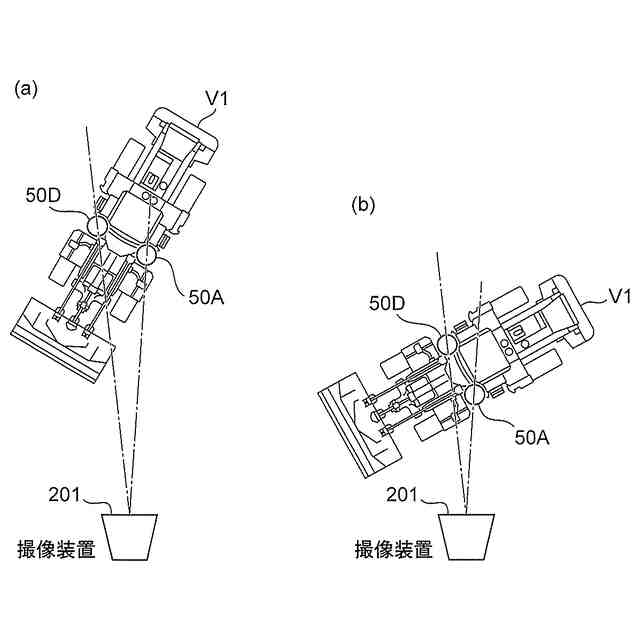
作業機械及び位置推定装置の作業現場における配置の様子を模式的に示す図。
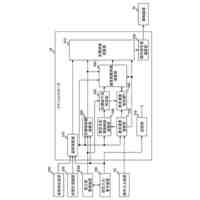
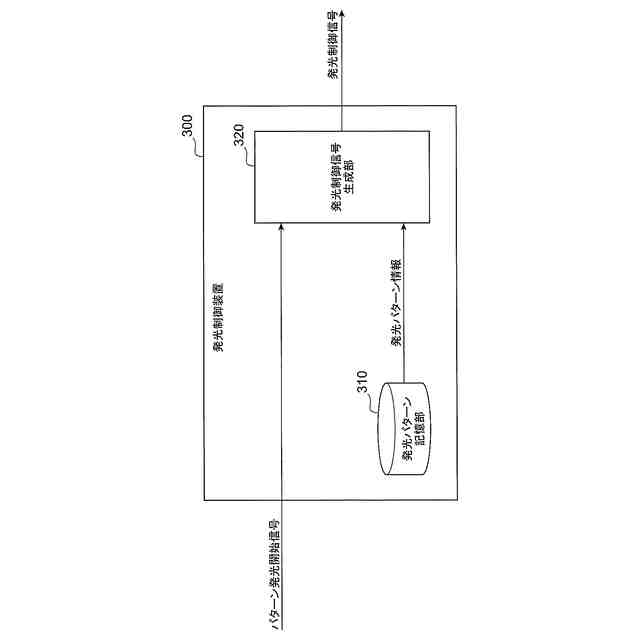
第1実施形態に係る発光制御装置の機能を示すブロック図。
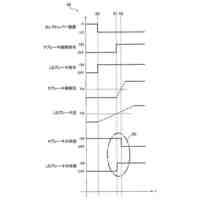
発光パターンの符号化の例を示す図。
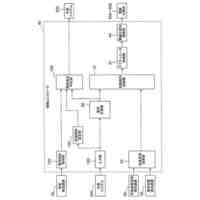
第1実施形態に係る画像処理装置の機能を示すブロック図。
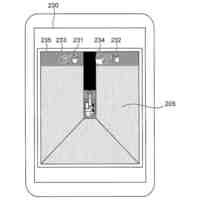
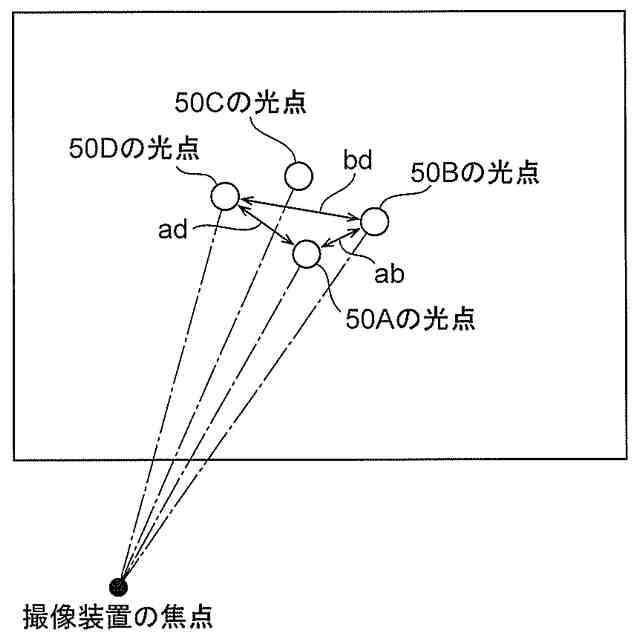
作業機械が図1のようにその左前部を撮像装置に向けた姿勢で撮像装置から遠い位置に存在する場合において、撮像装置によって取得された画像を示す図。
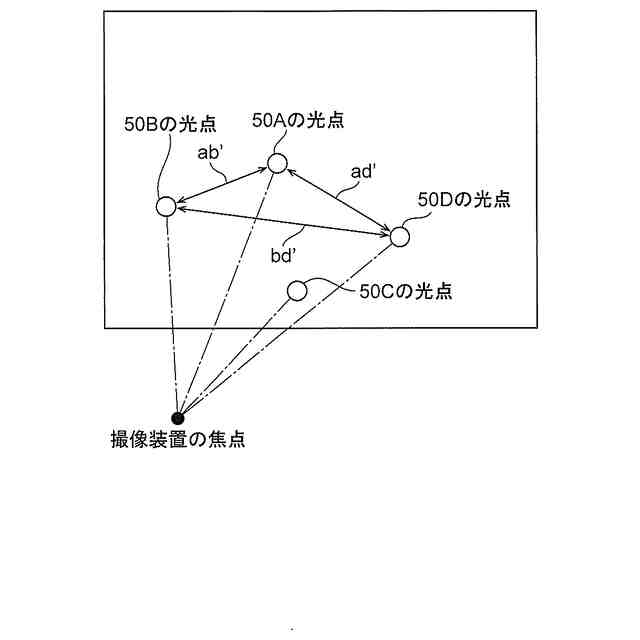
作業機械が図1とは逆にその右後部を撮像装置に向けた姿勢で撮像装置から近い位置に存在する場合において、撮像装置によって取得された画像を示す図。
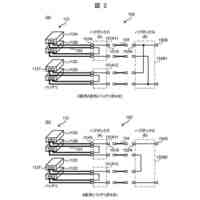
ランプの数が2つであった場合の作業機械と撮像装置との位置関係を示す上面図。
図9に示す場合において、撮像装置によって取得された画像を示す図。
図9に対してランプの数を3つにした場合の作業機械と撮像装置との位置関係を示す上面図。
図11に示す場合において、撮像装置によって取得された画像を示す図。
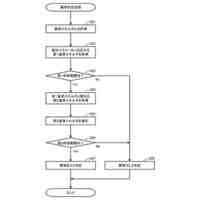
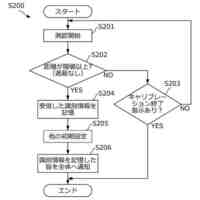
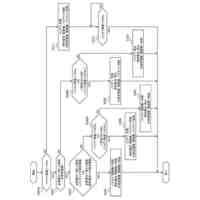
発光制御装置及び位置推定装置の動作の流れを示すフローチャート。
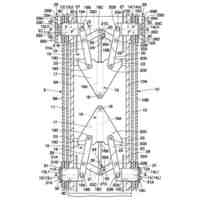
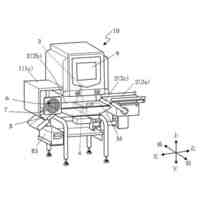
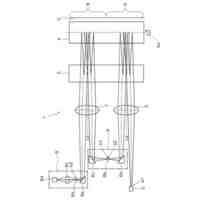
第2実施形態に係る作業機械の外観を模式的に示す図。
第2実施形態に係る位置推定システムの構成を示す図。
第3実施形態に係る作業機械及び位置推定装置の作業現場における配置の様子を模式的に示す図。
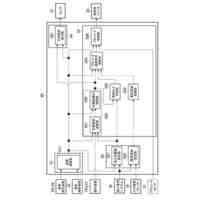
第3実施形態に係る画像処理装置の機能を示すブロック図。
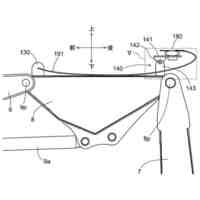
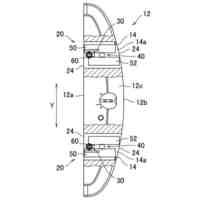
第4実施形態に係る作業機械の外観を模式的に示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
9日前
日立建機株式会社
電子機器装置
2か月前
日立建機株式会社
情報処理装置
1か月前
日立建機株式会社
電動式作業機械
1か月前
日立建機株式会社
ダンプトラック
2か月前
日立建機株式会社
電動式建設機械
1か月前
日立建機株式会社
充電支援システム
23日前
日立建機株式会社
部品需要予測装置
26日前
日立建機株式会社
建設機械の作業装置
1日前
日立建機株式会社
制御弁装置および作業機械
24日前
日立建機株式会社
作業機械の位置推定システム
1日前
日立建機株式会社
カウンタウエイト及び作業機械
1か月前
日本信号株式会社
光検知システム
1か月前
日立建機株式会社
木材チップ搬出装置及び木材チップ詰め込み機
10日前
日立建機株式会社
オプション用機器着脱支援システムおよび作業機械
1か月前
日立建機株式会社
作業機械
23日前
日立建機株式会社
電動式建設機械
1か月前
日立建機株式会社
ダンプトラックおよび給電システム
1か月前
日立建機株式会社
周囲監視システム、および、それを備える作業機械
3日前
個人
計量スプーン
11日前
個人
微小振動検出装置
22日前
株式会社イシダ
X線検査装置
22日前
三菱電機株式会社
計測器
1か月前
株式会社辰巳菱機
システム
1か月前
アンリツ株式会社
分光器
17日前
アンリツ株式会社
分光器
17日前
トヨタ自動車株式会社
表示装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ