TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132378
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029895
出願日
2024-02-29
発明の名称
ヘルパーロールの制御システム
出願人
株式会社TMEIC
代理人
弁理士法人高田・高橋国際特許事務所
主分類
H02P
29/40 20160101AFI20250903BHJP(電力の発電,変換,配電)
要約
【課題】定常運転時に過大なDroop量補正量が算出されることを防止することが可能なヘルパーロールの制御システムを提供する。
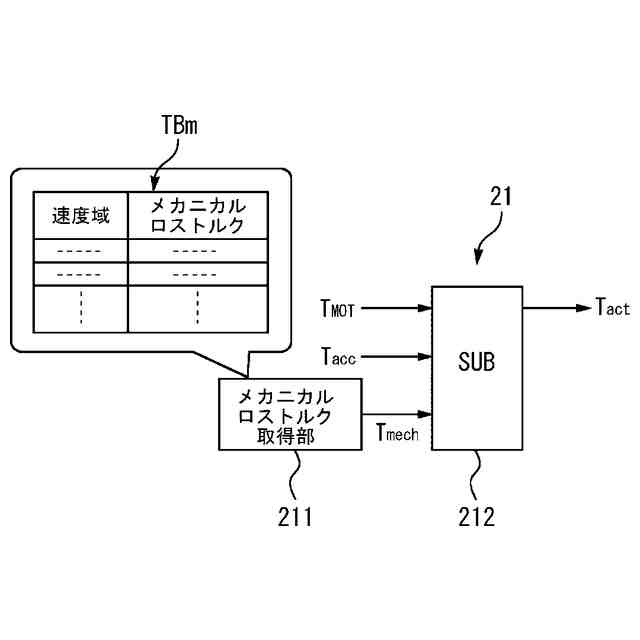
【解決手段】制御システムは、ヘルパーロールを駆動するモータの実負荷トルクを算出する実負荷トルク演算部と、実負荷トルクを用いてDroopゲインを算出するDroopゲイン演算部と、Droopゲインを用いてDroop量補正量を算出するDroop量補正量演算部と、Droop量補正量が加算された回転速度基準に追従するように、モータを制御するための電流および電圧を算出するモータ電流/電圧演算部と、を備える。実負荷トルク演算部は、メカニカルロストルクを取得するメカニカルロストルク取得部を有し、メカニカルロストルク取得部により取得されたメカニカルロストルクを定常運転時のモータトルクから減算することで、実負荷トルクを算出するように構成される。
【選択図】図2
特許請求の範囲
【請求項1】
圧延ラインに設置されて圧延材を通板するためのヘルパーロールのDroop量を制御するヘルパーロールの制御システムであって、
前記ヘルパーロールを駆動するモータの実負荷トルクを算出する実負荷トルク演算部と、
前記実負荷トルクを用いてDroopゲインを算出するDroopゲイン演算部と、
前記Droopゲインを用いてDroop量補正量を算出するDroop量補正量演算部と、
前記Droop量補正量が加算された回転速度基準に追従するように、前記モータを制御するための電流および電圧を算出するモータ電流/電圧演算部と、を備え、
前記実負荷トルク演算部は、メカニカルロストルクを取得するメカニカルロストルク取得部を有し、前記メカニカルロストルク取得部により取得されたメカニカルロストルクを定常運転時のモータトルクから減算することで、前記実負荷トルクを算出するように構成されたヘルパーロールの制御システム。
続きを表示(約 86 文字)
【請求項2】
前記Droopゲイン演算部は、算出したDroopゲインを所定の上限値に制限する制限器を有する、請求項1に記載のヘルパーロールの制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ヘルパーロールのDroop量を制御するヘルパーロールの制御システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
この種のヘルパーロールの制御システムは、特許文献1で知られている。この制御システムでは、加減速時にDroop量とモータ電流とからDroop量補償量(以下「Droop量補正量」ともいう)を演算し、演算したDroop量補償量を回転速度基準に加算してヘルパーロール制御器の速度コントローラに入力している。
【先行技術文献】
【特許文献】
【0003】
特開2000-344405号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
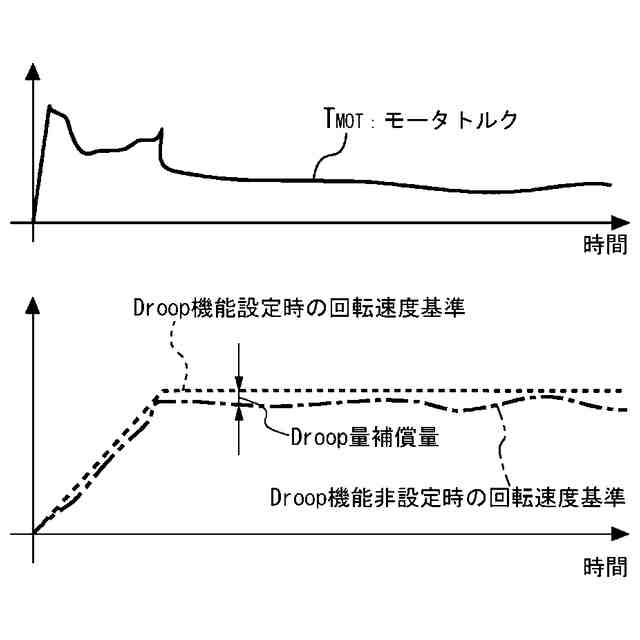
しかしながら、上記特許文献1に記載のものでは、Droop量補償量を算出する際に、加減速トルクは考慮されている一方でメカニカルロストルクは考慮されていないため、定常運転時の負荷トルクにメカニカルロストルクが含まれてしまう。このため、過大なDroop補償量が算出され、図5に示すように、Droop機能(モータ電流が増加すると回転速度が低下する垂下特性を持たせる機能)の設定時に過大なDroop量補償量の分だけ回転速度基準が下がることとなる。そうすると、速度基準と速度実績との偏差が増大し、モータが過負荷となり、ひいては、ヘルパーロールが設けられた圧延ラインの稼働が不安定になる恐れがある。
【0005】
そこで、本開示は、定常運転時に過大なDroop量補正量が算出されることを防止することが可能なヘルパーロールの制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1の観点は、圧延ラインに設置されて圧延材を通板するためのヘルパーロールのDroop量を制御するヘルパーロールの制御システムに関連する。制御システムは、ヘルパーロールを駆動するモータの実負荷トルクを算出する実負荷トルク演算部と、実負荷トルクを用いてDroopゲインを算出するDroopゲイン演算部と、Droopゲインを用いてDroop量補正量を算出するDroop量補正量演算部と、Droop量補正量が加算された回転速度基準に追従するように、モータを制御するための電流および電圧を算出するモータ電流/電圧演算部と、を備える。実負荷トルク演算部は、メカニカルロストルクを取得するメカニカルロストルク取得部を有し、メカニカルロストルク取得部により取得されたメカニカルロストルクを定常運転時のモータトルクから減算することで、実負荷トルクを算出するように構成される。
【0007】
第2の観点は、第1の観点に加えて、次の特徴を更に有する。Droopゲイン演算部は、算出したDroopゲインを所定の上限値に制限する制限器を有する。
【発明の効果】
【0008】
本開示によれば、メカニカルロストルクを考慮して実負荷トルクが算出され、算出された実負荷トルクを用いてDroopゲインひいてはDroop量補正量が求められる。これにより、定常運転時に過大なDroop量補正量が算出されることを防止することができ、Droop量補正量が加算されても回転速度基準が下がることがなく、モータが過負荷となることもない。従って、ヘルパーロールが設けられた圧延ラインにて圧延材を安定して通板させることができる。
【図面の簡単な説明】
【0009】
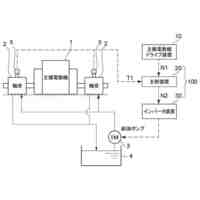
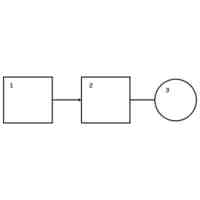
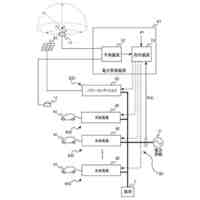
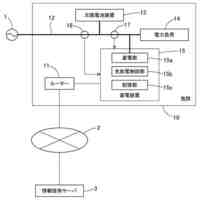
実施の形態によるヘルパーロールの制御システムの構成例を示すブロック図である。
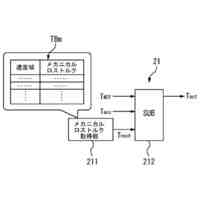
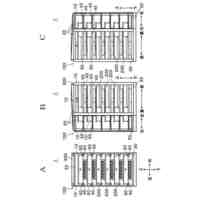
図1に示す実負荷トルク演算部の計算プロセスを示す図である。
図1に示すDroopゲイン演算部の計算プロセスを示す図である。
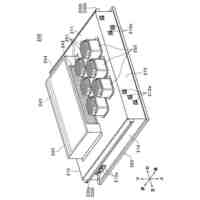
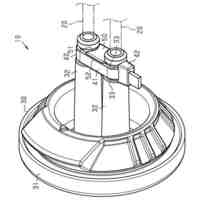
主幹制御装置のハードウェア構成の一例を示す図である。
Droop機能設定時とDroop機能非設定時の回転速度基準を夫々示す模式図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、圧延ラインに設置されて圧延材を通板するためのヘルパーロールのDroop量を制御する場合を例に、実施の形態によるヘルパーロールの制御システムについて説明する。各図において共通または対応する要素には、同一の符号を付して、説明を簡略化または省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社TMEIC
給油量制御システム
3日前
株式会社TMEIC
ヘルパーロールの制御システム
12日前
個人
電源装置
4日前
個人
永久磁石モーター
20日前
個人
バッテリ内蔵直流電源
3日前
個人
移動体を用いる駐車場発電所
24日前
日産自動車株式会社
電子機器
14日前
ニデック株式会社
モータの制御方法
11日前
トヨタ自動車株式会社
回転子
4日前
竹内工業株式会社
配線ダクト
1か月前
エイブリック株式会社
バッテリ装置
21日前
トヨタ自動車株式会社
溶接装置
17日前
大豊工業株式会社
モータ
3日前
井関農機株式会社
充電システム
14日前
富士電機株式会社
整流装置
1か月前
三菱ケミカル株式会社
電池
20日前
株式会社ダイヘン
移動装置
24日前
住友電装株式会社
電気接続箱
1か月前
愛知電機株式会社
巻線方法および巻線装置
19日前
富士電子工業株式会社
電力変換装置
5日前
株式会社アイシン
直流回転電機
17日前
株式会社ダイヘン
電力管理装置
12日前
ローム株式会社
半導体集積回路
1か月前
富士電機株式会社
電力変換装置
28日前
株式会社ダイヘン
電力変換装置
19日前
株式会社豊田自動織機
電動圧縮機
1か月前
大阪瓦斯株式会社
蓄電装置
20日前
株式会社マキタ
充電器
28日前
株式会社ダイヘン
変換装置集積体
19日前
住友電装株式会社
ワイヤハーネス
1か月前
カヤバ株式会社
アクチュエータユニット
3日前
ローム株式会社
スナバ回路
27日前
株式会社デンソー
インバータ装置
5日前
住友電装株式会社
ワイヤハーネス
13日前
志幸技研工業株式会社
ケーブル布設工法
3日前
エイブリック株式会社
スイッチングレギュレータ
28日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ