TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127907
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024908
出願日
2024-02-21
発明の名称
制御システム、制御方法、機械学習方法および学習済み機械学習モデル
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
13/02 20060101AFI20250826BHJP(制御;調整)
要約
【課題】制御対象を精度良くモデル化する。
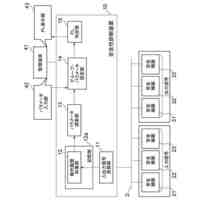
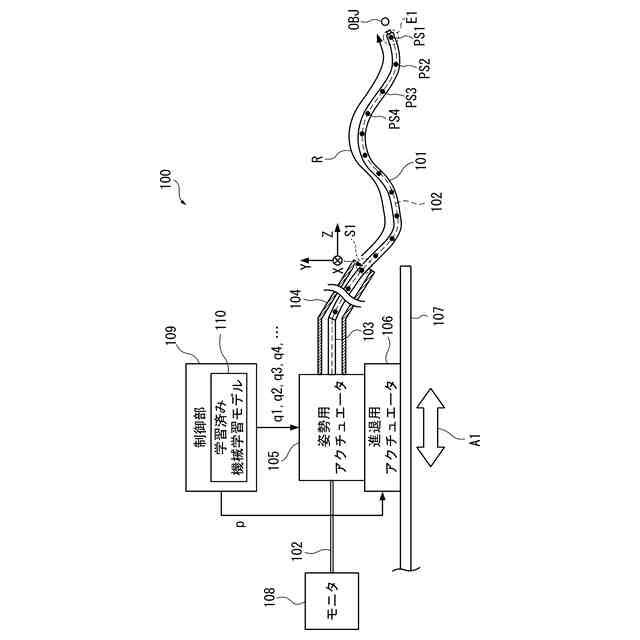
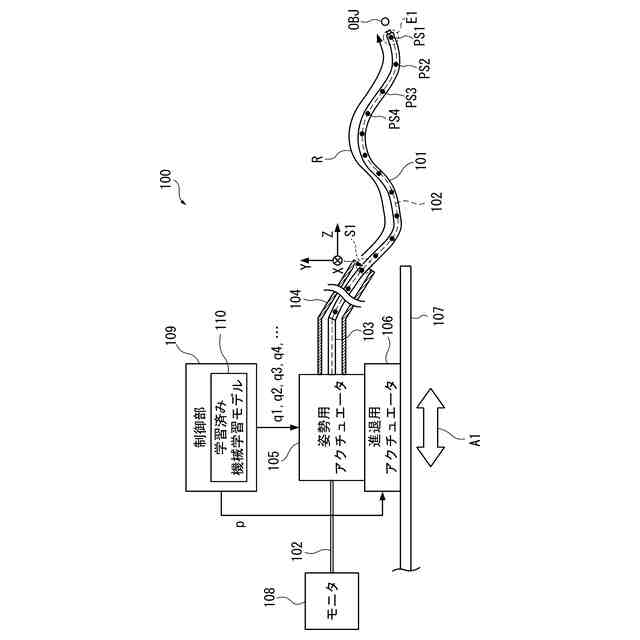
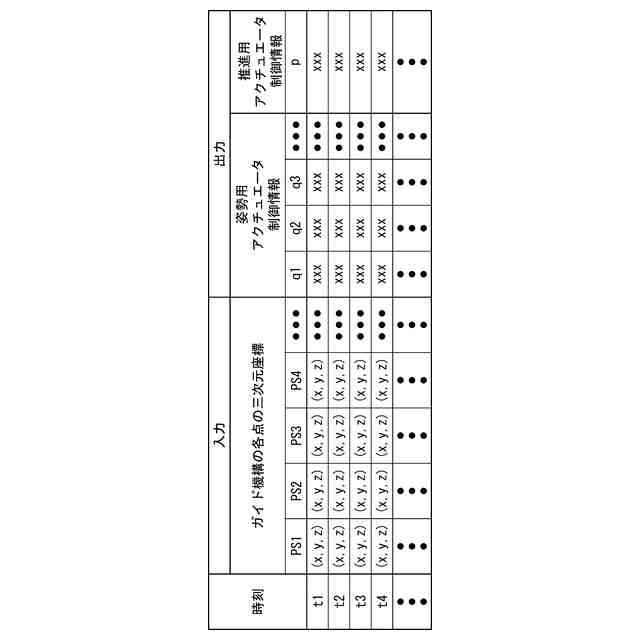
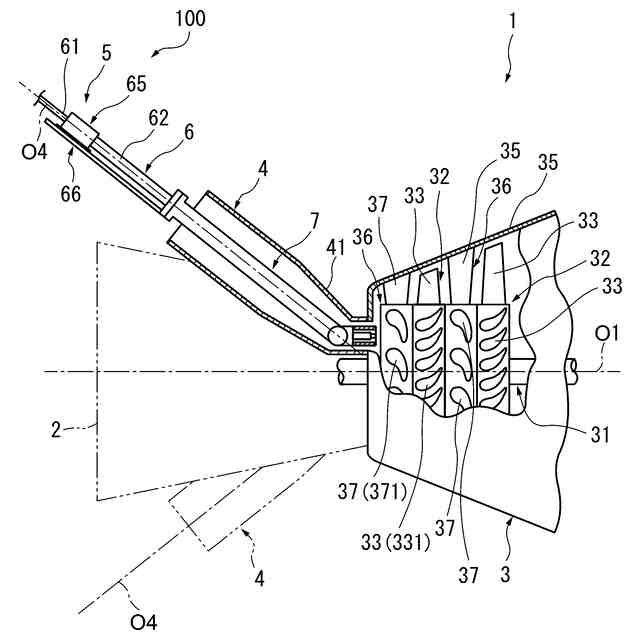
【解決手段】制御システムは、ペイロードを所定位置まで屈曲および進行しながら案内するガイド機構と、ガイド機構の姿勢を変化させる姿勢用アクチュエータと、ガイド機構を進退させる進退用アクチュエータと、姿勢用アクチュエータと進退用アクチュエータとを制御する制御部と、を備え、制御部が、ガイド機構の複数点の各三次元座標の時系列を入力し、各アクチュエータに対する各制御情報の各時系列とを出力する機械学習モデルであって、ガイド機構が所定の目標経路に沿って屈曲および進行するよう各アクチュエータを動作させることで取得された各アクチュエータに対する各制御情報の各時系列とガイド機構の複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習された学習済み機械学習モデルを用いて、各アクチュエータの各動作を制御する。
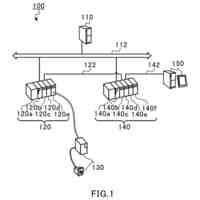
【選択図】図1
特許請求の範囲
【請求項1】
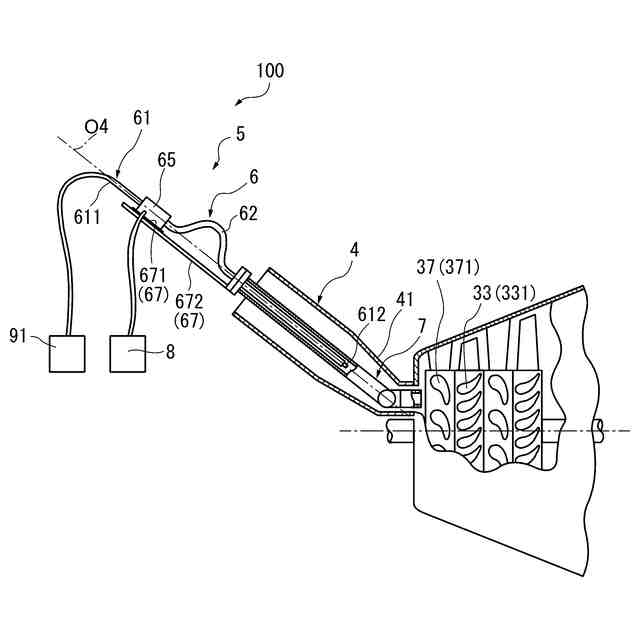
所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、
前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、
前記ガイド機構を進退させる進退用アクチュエータと、
前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、
を備え、
前記制御部が、
前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力する機械学習モデルであって、
前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習された学習済み機械学習モデルを用いて、
前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する
制御システム。
続きを表示(約 2,700 文字)
【請求項2】
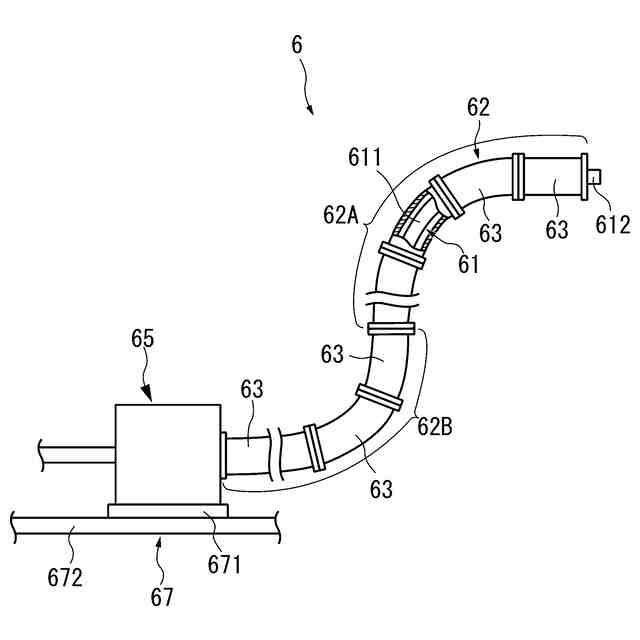
前記ガイド機構は、複数のワイヤの引き伸ばしによって姿勢を変化させる構造を有し、
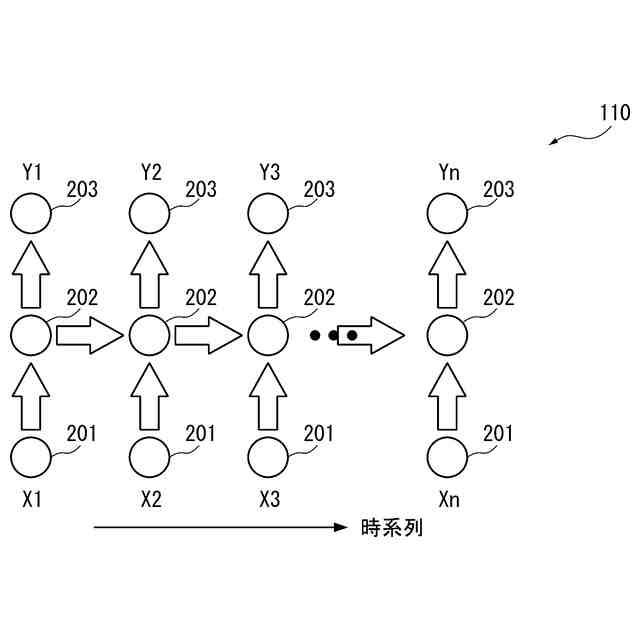
前記機械学習モデルは、中間層の出力を再び中間層に入力する自己ループを含むニューラルネットワークで構成されている
請求項1に記載の制御システム。
【請求項3】
前記中間層が長短期記憶を含む
請求項2に記載の制御システム。
【請求項4】
前記教師データは、
前記ガイド機構が前記目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを寸動させた場合に取得された前記姿勢用アクチュエータに対する制御情報の離散的な各値と前記進退用アクチュエータに対する制御情報の離散的な各値とを取得する第1過程と、
前記姿勢用アクチュエータに対する制御情報の離散的な各値と前記進退用アクチュエータに対する制御情報の離散的な各値とを、補間し、かつ、時刻に係る情報を付与することで、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを生成する第2過程と、
前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とに基づいて、前記姿勢用アクチュエータと前記進退用アクチュエータとを制御して、前記ガイド機構の前記複数点の各三次元座標の時系列を取得する第3過程と
によって取得される
請求項3に記載の制御システム。
【請求項5】
前記第1過程では、前記寸動における前記進退用アクチュエータの複数の停止位置の一部で、前記ガイド機構を前記目標経路からずらすように前記姿勢用アクチュエータを動かした場合の前記姿勢用アクチュエータに対する制御情報の離散的な値をさらに取得し、
前記第2過程では、前記ガイド機構を前記目標経路に沿って屈曲および進行させることで生成した前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と、前記ガイド機構を前記目標経路からずらすように前記姿勢用アクチュエータを動かした場合に取得された前記姿勢用アクチュエータに対する制御情報の離散的な値とに基づいて、前記姿勢用アクチュエータに対する制御情報の別の時系列と前記進退用アクチュエータに対する制御情報の別の時系列とをさらに生成し、
前記第3過程では、前記姿勢用アクチュエータに対する制御情報の別の時系列と前記進退用アクチュエータに対する制御情報の別の時系列とに基づいて、前記姿勢用アクチュエータと前記進退用アクチュエータとを制御して、前記ガイド機構の前記複数点の各三次元座標の別の時系列をさらに取得する
請求項4に記載の制御システム。
【請求項6】
所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、
前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、
前記ガイド機構を進退させる進退用アクチュエータと、
前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、
を備える制御システムの制御方法であって、
前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力する機械学習モデルであって、
前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習された学習済み機械学習モデルを用いて、
前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する
制御方法。
【請求項7】
所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、
前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、
前記ガイド機構を進退させる進退用アクチュエータと、
学習済みの機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、
を備える制御システムにおいて前記制御部が用いる前記機械学習モデルの機械学習方法であって、
前記学習済み機械学習モデルは、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力するものであって、
前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして前記機械学習モデルを機械学習する
機械学習方法。
【請求項8】
所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、
前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、
前記ガイド機構を進退させる進退用アクチュエータと、
学習済みの機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、
を備える制御システムにおいて前記制御部が用いる前記学習済み機械学習モデルであって、
前記機械学習モデルは、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力するものであって、
前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習されている
学習済み機械学習モデル。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システム、制御方法、機械学習方法および学習済み機械学習モデルに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
特許文献1には、先端にセンサが設けられた検査用ケーブルが内部に挿通可能とされて可撓性を有する制御対象であるチューブ、チューブの姿勢を調節可能な姿勢用アクチュエータ、および、チューブを進退させる進退用アクチュエータを備える検査用チューブの駆動制御装置が記載されている。この検査用チューブの駆動制御装置は、検査対象物の内部において予め定めたルートの開始点から目標点まで、ルートに沿ってチューブを移動させる解析を行う逆解析部と、逆解析部の解析結果に基づいて、ルート上の各位置にチューブが位置した際の姿勢用アクチュエータおよび進退用アクチュエータの操作量を解析操作量として取得する順解析部と、を備える。また、逆解析部は、例えば、ルート上に拘束された状態でチューブが強制的に移動されるように、三次元の解析モデル上で仮想的に複数のチューブ本体を曲げながら、開始点から目標点までチューブの先端を移動させるシミュレーションを行う。また、順解析部は、例えば、逆解析部でのシミュレーションにおいてチューブが移動することに伴って姿勢用アクチュエータおよび進退用アクチュエータが動かされた操作量である被操作量が取得される。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/090959号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に例示されているワイヤ駆動式チューブ構造では、例えば、ワイヤとチューブの間に発生する摩擦力がワイヤを引っ張る方向と緩める方向とで異なるヒステリシスを有するため、制御対象のモデル化が難しい場合あるという課題があった。
【0005】
本開示は、上記課題を解決するためになされたものであって、制御対象を精度良くモデル化することができる制御システム、制御方法、機械学習方法および学習済み機械学習モデルを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示に係る制御システムは、所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、前記ガイド機構を進退させる進退用アクチュエータと、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、を備え、前記制御部が、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力する機械学習モデルであって、前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習された学習済み機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する。
【0007】
本開示に係る制御方法は、所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、前記ガイド機構を進退させる進退用アクチュエータと、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、を備える制御システムの制御方法であって、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力する機械学習モデルであって、前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習された学習済み機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する。
【0008】
本開示に係る機械学習方法は、所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、前記ガイド機構を進退させる進退用アクチュエータと、学習済みの機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、を備える制御システムにおいて前記制御部が用いる前記機械学習モデルの機械学習方法であって、前記学習済み機械学習モデルは、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力するものであって、前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして前記機械学習モデルを機械学習する。
【0009】
本開示に係る学習済み機械学習モデルは、所定のペイロードを所定の位置まで屈曲および進行しながら案内するガイド機構と、前記ガイド機構の姿勢を変化させる姿勢用アクチュエータと、前記ガイド機構を進退させる進退用アクチュエータと、学習済みの機械学習モデルを用いて、前記姿勢用アクチュエータの動作と前記進退用アクチュエータの動作とを制御する制御部と、を備える制御システムにおいて前記制御部が用いる前記学習済み機械学習モデルであって、前記機械学習モデルは、前記ガイド機構における複数点の各三次元座標の時系列を入力し、前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列とを出力するものであって、前記ガイド機構が所定の目標経路に沿って屈曲および進行するよう前記姿勢用アクチュエータと前記進退用アクチュエータとを動作させることで取得された前記姿勢用アクチュエータに対する制御情報の時系列と前記進退用アクチュエータに対する制御情報の時系列と前記ガイド機構の前記複数点の各三次元座標の時系列との組み合わせを教師データとして機械学習されている。
【発明の効果】
【0010】
本開示の制御システム、制御方法、機械学習方法および学習済み機械学習モデルによれば、制御対象を精度良くモデル化することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
24日前
ローム株式会社
基準電圧源
21日前
愛知製鋼株式会社
車両用システム
1か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
28日前
株式会社ダイフク
搬送設備
10日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン株式会社
配送システム
24日前
トヨタ自動車株式会社
クラッチペダル
1か月前
株式会社ダイフク
物品搬送設備
10日前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
株式会社CAOS
移動体の制御システム
20日前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
株式会社TMEIC
安全性診断装置
4日前
アズビル株式会社
制御システムおよび制御方法
2か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
ローム株式会社
電源回路用の電子負荷装置
4日前
シンフォニアテクノロジー株式会社
自動走行車両
19日前
株式会社マキタ
運搬車
4日前
ミツミ電機株式会社
電源回路および駆動回路
2か月前
トヨタ自動車株式会社
生産順序計画システム
1か月前
株式会社マキタ
運搬車
4日前
チームラボ株式会社
走行システム及び走行装置
1か月前
キヤノン株式会社
自律移動体制御システム
24日前
株式会社アマダ
加工スケジュール設定装置
2か月前
株式会社IHI
制御システム
1か月前
株式会社アイシン
自律移動体
1か月前
日本製鉄株式会社
搬送装置及び制御装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ