TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122813
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018483
出願日
2024-02-09
発明の名称
ロボット、ロボット制御装置、ロボット制御システムおよびロボット制御方法
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
G05D
1/622 20240101AFI20250815BHJP(制御;調整)
要約
【課題】 移動経路上に障害物が存在する場合、ロボットが自律的に障害物の迂回又は停止以外の方法も利用することができる技術を提供する。
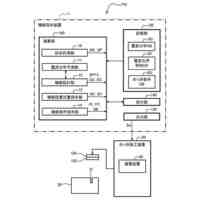
【解決手段】 自律移動可能なロボットであって、ロボットの移動経路上の物体を検知する環境検知部と、前記ロボットが検知した前記物体を迂回する動作、前記ロボットが検知した前記物体を撤去する動作、ロボット以外の物体撤去リソースに検知した前記物体を撤去させる動作、前記ロボット以外の物体撤去リソースと前記ロボットが検知した前記物体を撤去する動作の内、いずれかを選択する動作決定部とを備えることを特徴とするロボット。
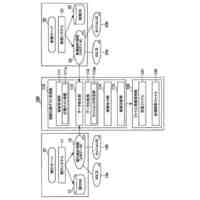
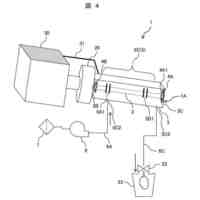
【選択図】 図1
特許請求の範囲
【請求項1】
自律移動可能なロボットであって、
ロボットの移動経路上の物体を検知する環境検知部と、
前記環境検知部が検知した前記物体を迂回する動作、前記環境検知部が検知した前記物体を撤去する動作、ロボット以外の物体撤去リソースに前記環境検知部が検知した前記物体を撤去させる動作、前記ロボット以外の物体撤去リソースと前記ロボットが前記環境検知部が検知した前記物体を撤去する動作のいずれかを決定する動作決定部とを備えることを特徴とするロボット。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のロボットであって、
前記環境検知部が前記物体を移動可能と判定したときに、動作決定部の決定に基づいて撤去動作を制御するロボット制御部をさらに備えることを特徴とするロボット。
【請求項3】
請求項2に記載のロボットにおいて、
前記環境検知部は、ロボットの作業環境を事前に登録したベースマップに基づいて、検知した前記物体が前記ベースマップに登録されているか否かを判定し、前記ベースマップに登録されていない物体を移動可能と判定することを特徴とするロボット。
【請求項4】
請求項2に記載のロボットにおいて、
前記環境検知部は、ロボットの作業環境を検知し、ロボットの作業環境に関する環境情報に基づいて推定マップを生成し、ロボットの作業環境を事前に登録したベースマップと前記推定マップとの差分から、検知した前記物体の移動可否を判定することを特徴とするロボット。
【請求項5】
請求項3または請求項4に記載のロボットにおいて、
前記環境検知部が移動可能と判定した前記物体に対する撤去コストを算出するコスト算出部をさらに備えることを特徴とするロボット。
【請求項6】
請求項1のロボットであって、
前記物体を撤去するコストである撤去コストと前記ロボットが前記物体を迂回するコストである迂回コストを算出するコスト算出部をさらに備え、
前記動作決定部は、前記コスト算出部が算出した前記撤去コストと前記迂回コストとを比較して小さいコストとなるロボットの動作を決定することを特徴とするロボット。
【請求項7】
請求項6に記載のロボットにおいて、
前記環境検知部が検知した前記物体に関する物体情報を取得する物体情報取得部を備えることを特徴とするロボット。
【請求項8】
請求項7に記載のロボットにおいて、
前記コスト算出部は、前記物体情報取得部が取得した前記物体情報に基づいて、前記撤去コストを算出することを特徴とするロボット。
【請求項9】
請求項7に記載のロボットにおいて、
前記物体情報取得部が移動経路上の物体が作業員であると判定すると、作業員が有する携帯端末の表示画面を介して、前記作業員へ移動を要請する出力制御部を備えることを特徴とするロボット。
【請求項10】
請求項7に記載のロボットにおいて、
前記物体情報は、物体の、形状、体積、重量、強度、障害物の撤去に必要な器具の内、少なくとも1つ以上を含むことを特徴とするロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動経路上に障害物が発生しうる環境下において、ロボットの動作を決定するロボット、ロボット制御装置、ロボット制御システムおよびロボット制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
物流倉庫などで、搬送ロボットが活用されている。搬送ロボットは移動経路に従い移動するが、移動経路上に存在する障害物によって、搬送ロボットの移動が制限される場合もある。障害物とは、例えば、荷物や作業員や他の搬送ロボットなどである。そのような場合でも、搬送ロボットに適切な回避動作を実行させれば、短時間で所与の作業に復帰させ、搬送ロボットの稼働率を高く維持することができる。
【0003】
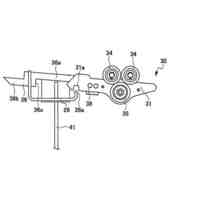
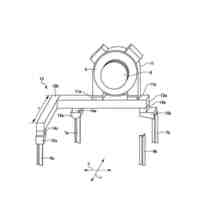
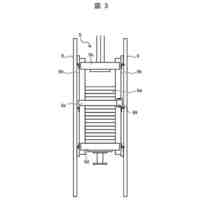
例えば、特許文献1には、鶏舎内で自律走行する鶏舎用自律移動ロボットに関し、「前記ベルトに接触した前記障害物が前記センサで検知されないときは、前記ベルトと前記障害物との間で発生した摩擦力により前記ベルトが前記複数の回転体にまたがって回転走行を開始して、前記自律移動ロボットの進行方向から前記障害物を排除する一方、前記ベルトに接触した前記障害物が前記センサで検知されたときは、前記制御部で前記自律移動ロボットの移動を停止させる、自律移動ロボットを提供する。」と開示がある。具体的には、同文献の段落0013~0015に「次に、バンパユニット2の動作について説明する。障害物10が鶏などの軽い物体の場合(約3kg以下)と、障害物11がブロックなどの重い物体の場合(約10kg以上)とで動作が異なる。まずは、障害物10が軽い物体の場合の説明を行う。図7Aは自律移動ロボット1の走行経路上に障害物10が存在する場合であり、図7Aが天井方向から見た図、図7Bが側面から見た図である。説明しやすくするため模式図とした。自律移動ロボット1がV2方向へ走行中、バンパユニット2が障害物10と接触すると、障害物10には重さに比例した摩擦力Ff1が発生し、その摩擦力Ff1により圧縮バネ912は、D1=Ff1(摩擦力)/K(バネ定数)だけ縮む。障害物10の重さが軽い物体の場合は、たわみ量D1も小さいため、センサ910は反応しない。ちなみに、センサ910が反応するまでに必要なたわみ量をDとすると、D>D1という関係式となる。そのまま、自律移動ロボット1が移動を続けると、ベルト201と障害物10との接触部に、摩擦力F1が発生する。一般的に、静止摩擦係数よりもベアリングの転がり摩擦係数のほうが遥かに小さいので、この摩擦力F1によりベルト201が回転を始める。自律移動ロボット1が摩擦力Ff1より強い推進力で走行している場合、障害物10は、自律移動ロボット1から見てF1方向へと移動していき、図8の状態となる。次に、障害物110重い物体の場合について図9を用いて説明する。障害物11の重さが重い物体の場合は、たわみ量D2も大きくなるため、その結果、センサ910がONに切り替わる。ちなみに、D<D2という関係式で表すことが出来る。センサ910がONに切り替わると、制御部5が台車部3へ指令を送信し走行を停止させる。」との開示がある。
【先行技術文献】
【特許文献】
【0004】
特開2018-128772号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1では、ロボットが障害物を検知した場合は障害物を撤去し、ロボットが障害物を検知した場合は停止することが記載されており、検知した障害物を撤去するか迂回するかの考慮はされていない。
【0006】
そこで、本発明は、移動経路上に障害物が存在する場合、ロボットが自律的に障害物の迂回又は停止以外の方法も利用することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題は、例えば、ロボットの移動経路上の物体を検知する環境検知部と、前記環境検知部が検知した前記物体を迂回する動作、前記ロボットが検知した前記物体を撤去する動作、ロボット以外の物体撤去リソースに検知した前記物体を撤去させる動作、前記ロボット以外の物体撤去リソースと前記ロボットが検知した前記物体を撤去する動作の内、いずれかを決定する動作決定部とを備えるロボットによって解決される。
【発明の効果】
【0008】
本発明によれば、移動経路上に障害物が存在する場合でも、ロボットが自律的に障害物の迂回または停止以外の方法も利用できる。
【図面の簡単な説明】
【0009】
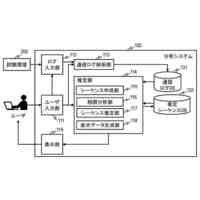
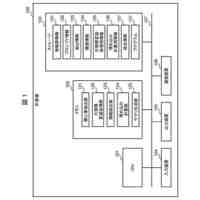
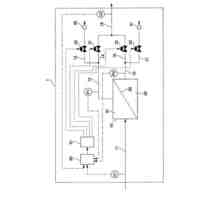
実施例1のロボット制御システムの構成を表す図。
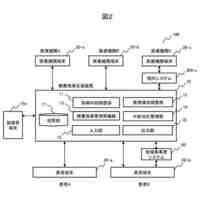
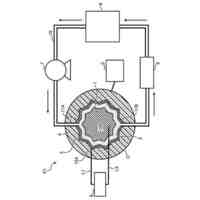
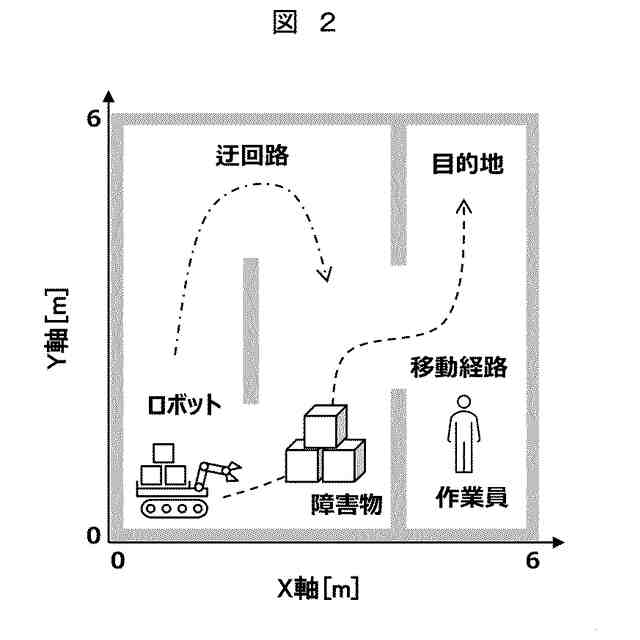
ロボットの作業環境の一例を示す図。
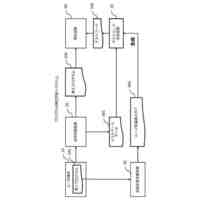
図2の作業環境を強化学習の入力情報として表現した図。
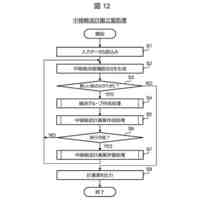
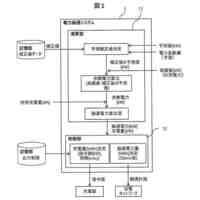
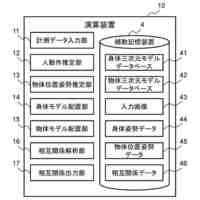
実施例1のロボット制御装置のデータ処理手順を表すフローチャート。
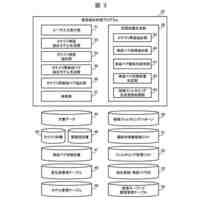
実施例1に係る撤去手法候補のリストの一例を示す図。
実施例1に係る価値関数テーブルの一例を示す図。
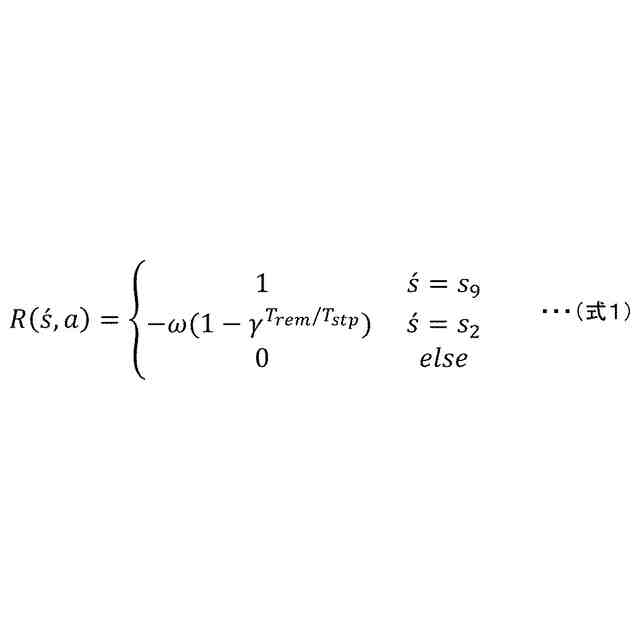
実施例1に係る最適制御則の一例を示す図。
実施例2のロボット制御装置のデータ処理手順を表すフローチャート。
障害物が作業員である場合の、携帯端末の表示画面例。
管理者にサポートを要請した場合の、表示装置の表示画面例。
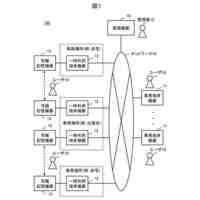
変形例のロボット制御システムの構成を表す図。
【発明を実施するための形態】
【0010】
以下、図面を用いて、本発明のロボット制御システムの実施例を説明する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
制御装置
今日
株式会社日立製作所
回転電機
1か月前
株式会社日立製作所
回転電機
24日前
株式会社日立製作所
制御基板
1か月前
株式会社日立製作所
蓄電装置
28日前
株式会社日立製作所
エレベーター
1か月前
株式会社日立製作所
エレベーター
28日前
株式会社日立製作所
電動機制御装置
7日前
株式会社日立製作所
機能割付システム
14日前
株式会社日立製作所
環境評価システム
2日前
株式会社日立製作所
航空機用の推進装置
7日前
株式会社日立製作所
沿岸環境監視システム
7日前
株式会社日立製作所
輸送計画装置及び方法
23日前
株式会社日立製作所
巻上機及びエレベーター
1か月前
株式会社日立製作所
分析システム及び分析方法
1か月前
株式会社日立製作所
エレベーター及び保護カバー
1か月前
株式会社日立製作所
現新比較テスト支援システム
29日前
株式会社日立製作所
療養指導支援装置および方法
28日前
株式会社日立製作所
プログラム検証支援システム
24日前
株式会社日立製作所
釣合いおもり及びエレベーター
1か月前
株式会社日立製作所
接点浄化装置及び風力発電装置
29日前
株式会社日立製作所
めっき装置及びめっき形成方法
1か月前
株式会社日立製作所
情報処理装置および情報処理方法
28日前
株式会社日立製作所
電力融通システム、電力システム
29日前
株式会社日立製作所
補修指示装置および補修指示方法
1か月前
株式会社日立製作所
画像解析システム及び画像解析方法
24日前
株式会社日立製作所
情報処理システム及び情報処理方法
今日
株式会社日立製作所
施策策定方法及び施策策定システム
24日前
株式会社日立製作所
情報抽出システム及び情報抽出方法
3日前
株式会社日立製作所
情報処理システム及び情報処理方法
10日前
株式会社日立製作所
契約照会システム及び契約照会方法
23日前
株式会社日立製作所
可搬記憶機器および情報処理システム
29日前
株式会社日立製作所
輸送管理システム、及び輸送管理方法
17日前
株式会社日立製作所
ガス分離システムおよび濃度制御方法
21日前
株式会社日立製作所
軟磁性複合材料板およびその製造方法
17日前
株式会社日立製作所
行動解析システム、及び行動解析方法
14日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ