TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121842
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024225059,2024086493
出願日
2024-12-20,2024-05-28
発明の名称
ポイントクラウドレジストレーション
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G06T
7/33 20170101AFI20250813BHJP(計算;計数)
要約
【課題】 ポイントクラウドレジストレーションの方法を提供する。
【解決手段】 コンピュータ実装された方法は、ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、該2D重なり部分は、ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に対応し、2D重なり部分を複数のセルに分割し、ソース2D投影からの少なくとも閾値数のポイントと、ターゲット2D投影からの少なくとも閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、該重なりセルについて比較プロセスを実行し、最良一致ターゲットセットを選択し、ソースセットのポイントと最良一致ターゲットセットのポイントとの間の又はその逆の間の変換を決定し、該変換を適用して、ソース3Dポイントクラウドをターゲット3Dポイントクラウドに又はその逆にレジストレーションする、ことを有する。
【選択図】 図1
特許請求の範囲
【請求項1】
コンピュータ実装された方法であって、
ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の重なり領域に対応し、
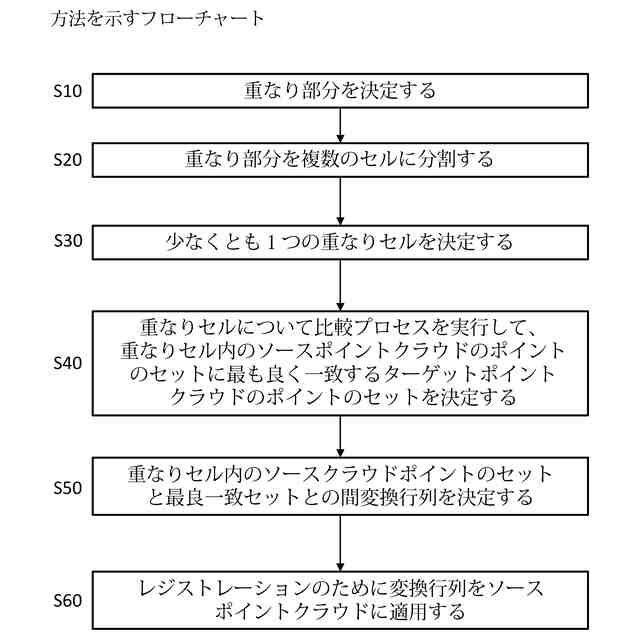
前記2D重なり部分を複数のセルに分割し、前記ソース2D投影からの少なくとも第1閾値数のポイントと、前記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内に入る前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内に入る前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内に入る前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
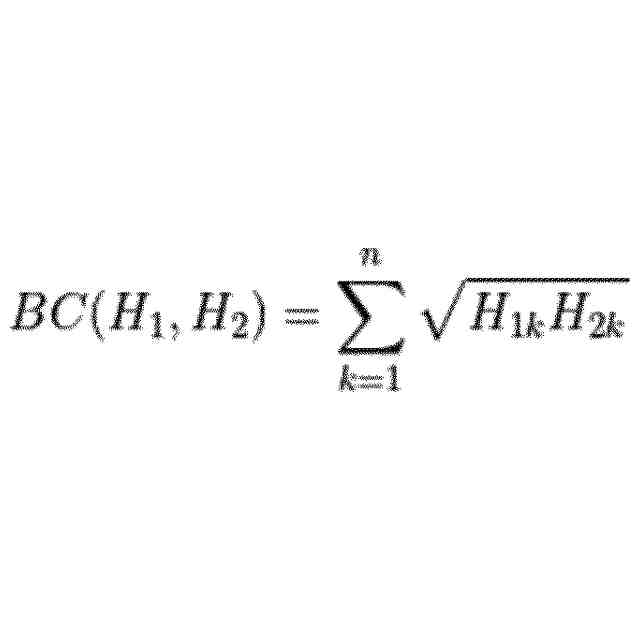
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有するコンピュータ実装された方法。
続きを表示(約 3,300 文字)
【請求項2】
コンピュータ実装された方法であって、
ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3Dポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、前記ソース地理的エリア及び前記ターゲット地理的エリアを表し、
前記3D重なりボリュームを複数のセルに分割し、前記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、前記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内にある前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内にある前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内にある前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有するコンピュータ実装された方法。
【請求項3】
前記ソース地理的エリアと前記ターゲット地理的エリアとの間の前記重なり領域をGPSデータに基づいて決定する、ことを更に有する請求項1に記載のコンピュータ実装された方法。
【請求項4】
前記3D重なりボリュームを推定することは、第1次元及び第2次元において、前記ソース3Dポイントクラウドのソース2D投影と前記ターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分によって画成され、且つ第3次元において、該第3次元における前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドの上境界及び下境界によって画成される前記3D重なりボリュームを決定することを有し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の前記重なり領域に対応する、請求項2に記載のコンピュータ実装された方法。
【請求項5】
前記重なりセルについての前記ターゲットセットは、前記重なりセルをムーア近傍の中心セルとして、前記ムーア近傍内のそれぞれのセル内に入る前記ターゲット3Dポイントクラウドのターゲットセットのポイントとして決定される、請求項1乃至4のいずれか一項に記載のコンピュータ実装された方法。
【請求項6】
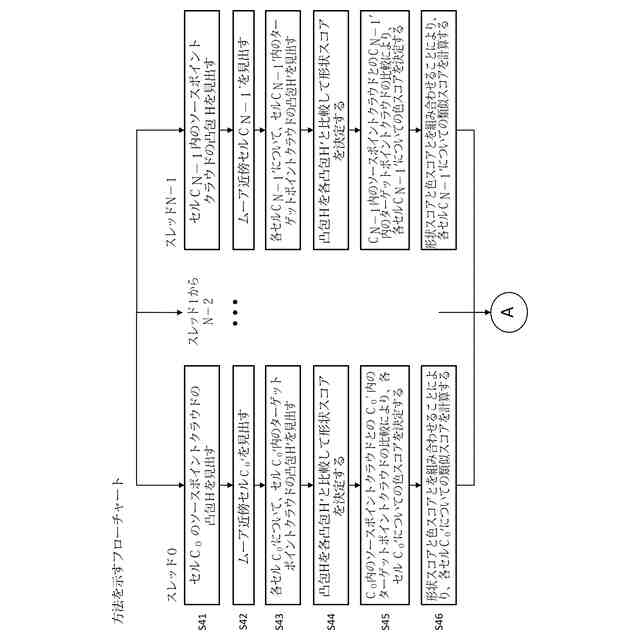
前記ソースセットを前記複数のターゲットセットの各々と比較することは、前記ソースセットのポイントのソース凸包を決定し、前記複数のターゲットセットのポイントの複数のターゲット凸包をそれぞれ決定し、前記ソース凸包を各ターゲット凸包と比較する、ことを有する、請求項1乃至4のいずれか一項に記載のコンピュータ実装された方法。
【請求項7】
前記ソースセットを前記複数のターゲットセットの各々と比較することは、各ターゲットセットについて、
前記ソースセットのポイントの形状と該ターゲットセットのポイントの形状との間で第1の比較を実行して、該ターゲットセットについての前記類似スコアに対する第1の寄与を決定する、及び/又は
前記ソースセットのポイントの強度と該ターゲットセットのポイントの強度との間で第2の比較を実行して、該ターゲットセットについての前記類似スコアに対する第2の寄与を決定する、
ことを有する、請求項1乃至4のいずれか一項に記載のコンピュータ実装された方法。
【請求項8】
複数の重なりセルが決定された場合に、
各重なりセルについて前記比較プロセスを実行し、
前記最良一致ターゲットセットのうちの少なくとも1つの最良一致ターゲットセットのポイントを有する最終ターゲットセットのポイントを決定し、対応する少なくとも1つのソースセットのポイントを有する最終ソースセットのポイントを決定し、
前記最終ソースセットのポイントと前記最終ターゲットセットのポイントとの間で前記変換を決定する、
ことを有する、請求項1乃至4のいずれか一項に記載のコンピュータ実装された方法。
【請求項9】
最終ターゲットセットのポイントを決定することは、前記最良一致ターゲットセットのうち、閾値スコアを上回る類似スコアを有する又は最も高い類似スコアを有する少なくとも1つを選択し、前記選択された少なくとも1つの最良一致ターゲットセットのポイントを含むものとして前記最終ターゲットセットのポイントを決定する、ことを有する、請求項8に記載のコンピュータ実装された方法。
【請求項10】
コンピュータ上で実行されるときに該コンピュータに方法を実行させるコンピュータプログラムであって、当該方法は、
ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の重なり領域に対応し、
前記2D重なり部分を複数のセルに分割し、前記ソース2D投影からの少なくとも第1閾値数のポイントと、前記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内に入る前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内に入る前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内に入る前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有する、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、ポイントクラウドレジストレーションに関し、特に、コンピュータ実装された方法、コンピュータプログラム、及び情報プログラミング装置に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
ポイントクラウドアライメントとしても知られるポイントクラウドレジストレーションのタスクは、共通座標系において複数のポイントクラウドをレジストレーションしたり、1つ以上のポイントクラウドを別のポイントクラウドと又は別のポイントクラウドにアライメントしたりするプロセスである。レジストレーションは、別のポイントクラウドとのアライメントのために1つのポイントクラウドに必要な変換を推定し、推定された変換を適用することを含み得る。ポイントクラウドレジストレーションは、複数のより小さいポイントクラウドから、より大きいポイントクラウドが構築されることを可能にする。
【0003】
以上に鑑み、ポイントクラウドレジストレーション方法が望まれる。
【発明の概要】
【0004】
第1の態様の一実施形態によれば、コンピュータ実装された方法がここに開示され、当該コンピュータ実装された方法は、ソース3D(3次元)ポイントクラウドのソース2D(2次元)投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、上記ソース3Dポイントクラウド及び上記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、上記2D重なり部分は、上記ソース地理的エリアと上記ターゲット地理的エリアとの間の重なり領域に対応し、上記2D重なり部分を複数のセルに分割し、上記ソース2D投影からの少なくとも第1閾値数のポイントと、上記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し(又は、上記ソース2D投影からの少なくとも第1閾値数のポイントと、上記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つのセルを、少なくとも1つの重なりセルとして決定し)、上記(又は上記)重なりセルについて比較プロセスを実行し、(上記重なりセルについての)当該比較プロセスは、(上記ターゲット2D投影において)上記重なりセル内に入る上記ターゲット3Dポイントクラウドの第1(ターゲット)セットのポイント、並びに(上記ターゲット2D投影において)上記重なりセルに隣接する/取り囲むセル内に入る上記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なる(ターゲット)セットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、(上記ソース2D投影において)上記重なりセル内に入る上記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、上記ソースセットを上記複数のターゲットセットの各々と比較して、上記複数のターゲットセットそれぞれについての複数の類似スコアを決定し(各類似スコアが、上記ソースセットと上記ターゲットセットとの間の類似性を定量化し)、上記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、上記ソースセットのポイントと上記最良一致ターゲットセットのポイントとの間の又は上記最良一致ターゲットセットのポイントと上記ソースセットのポイントとの間の変換(行列)を決定し、上記変換(行列)を(上記ソース3Dポイントクラウドに)適用して、上記ソース3Dポイントクラウドを上記ターゲット3Dポイントクラウドに又は上記ターゲット3Dポイントクラウドを上記ソース3Dポイントクラウドにレジストレーションする、ことを有する。
【0005】
第2の態様の一実施形態によれば、コンピュータ実装された方法がここに開示され、当該コンピュータ実装された方法は、ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3D(3次元)ポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、上記ソース3Dポイントクラウド及び上記ターゲット3Dポイントクラウドは、それぞれ、上記ソース地理的エリア及び上記ターゲット地理的エリアを表し、上記3D重なりボリュームを複数のセルに分割し、上記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、上記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し(又は、上記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、上記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つのセルを、少なくとも1つの重なりセルとして決定し)、上記(又は上記)重なりセルについて比較プロセスを実行し、(上記重なりセルについての)当該比較プロセスは、上記重なりセル内にある上記ターゲット3Dポイントクラウドの第1(ターゲット)セットのポイント、並びに上記重なりセルに隣接する/取り囲むセル内にある上記ターゲット3Dポイントクラウドの第2(ターゲット)セットのポイント及び更なる(ターゲット)セットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、上記重なりセル内にある上記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、上記ソースセットを上記複数のターゲットセットの各々と比較して、上記複数のターゲットセットそれぞれについての複数の類似スコアを決定し(各類似スコアが、上記ソースセットと上記ターゲットセットとの間の類似性を定量化し)、上記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、上記ソースセットのポイントと上記最良一致ターゲットセットのポイントとの間の又は上記最良一致ターゲットセットのポイントと上記ソースセットのポイントとの間の変換(行列)を決定し、上記変換(行列)を(上記ソース3Dポイントクラウド)適用して、上記ソース3Dポイントクラウドを上記ターゲット3Dポイントクラウドに又は上記ターゲット3Dポイントクラウドを上記ソース3Dポイントクラウドにレジストレーションする、ことを有する。
【0006】
任意の態様/実施形態に関する特徴が、任意の他の態様/実施形態に適用されてもよい。
【図面の簡単な説明】
【0007】
単なる例として図面が参照され得る。
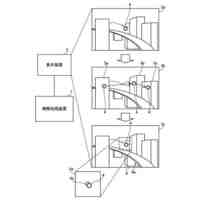
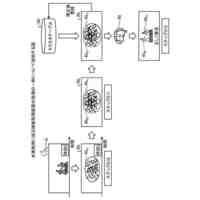
ポイントクラウドレジストレーションを理解するのに有用な図である。
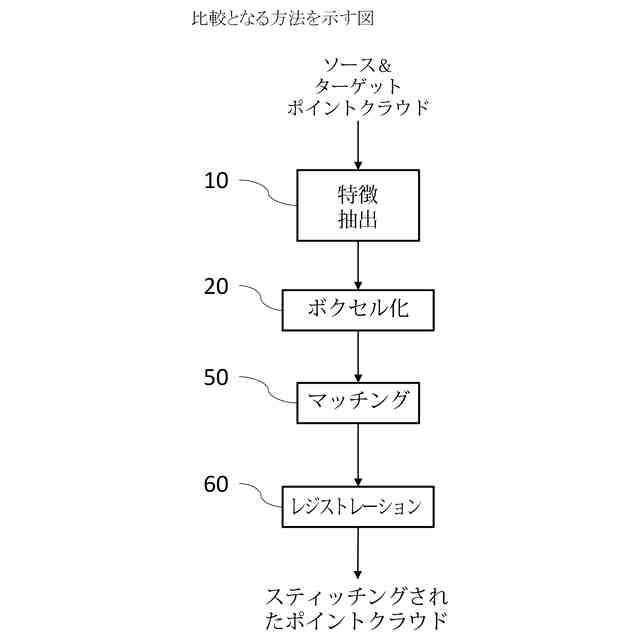
比較となる方法を示す図である。
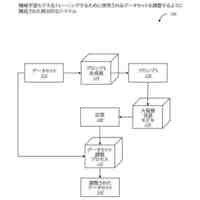
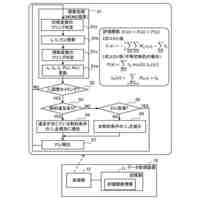
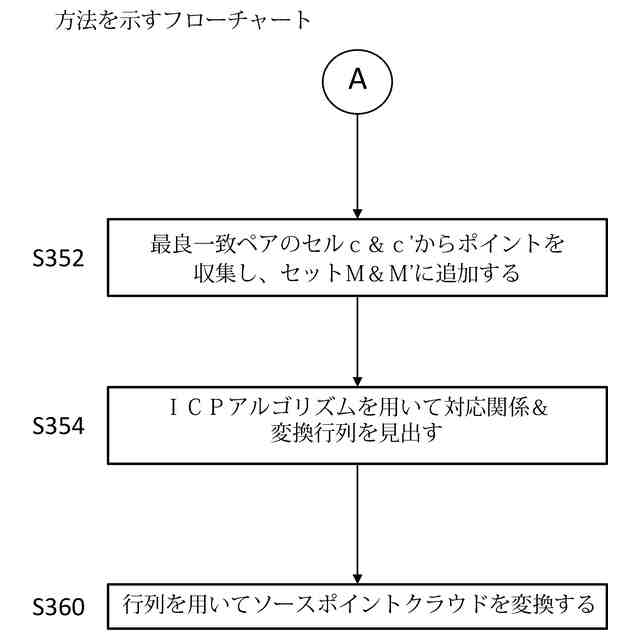
方法を示すフローチャートである。
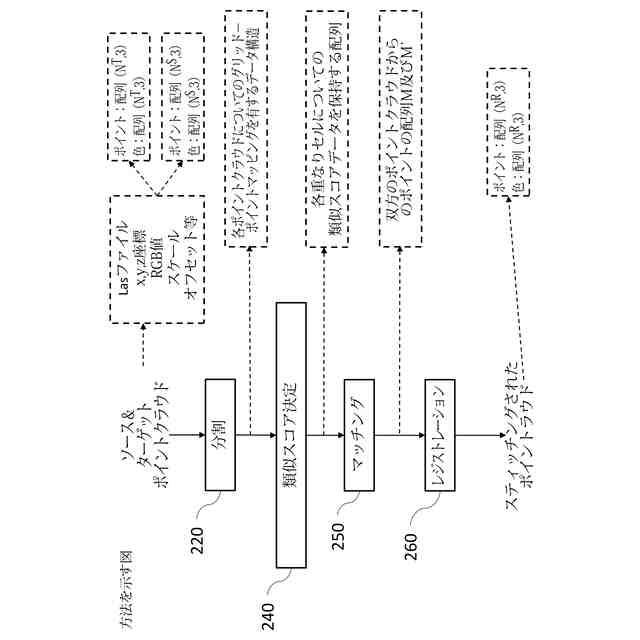
方法を示す図である。
方法を示す図である。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
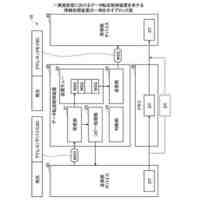
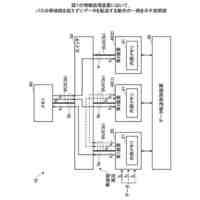
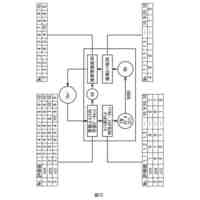
装置を示す図である。
【発明を実施するための形態】
【0008】
上述のように、ポイントクラウドレジストレーションのタスクは、共通座標系において複数のポイントクラウドをアライメントするプロセスである。アライメントされるポイントクラウドをソースポイントクラウドと呼ぶことができ、(それとソースポイントクラウドがアライメントされることになる)別のポイントクラウドを基準ポイントクラウド又はターゲットポイントクラウドと呼ぶことができる。
【0009】
ポイントクラウドレジストレーションは、ターゲットポイントクラウドとのアライメントのためにソースポイントクラウドに必要な変換を推定し、ソースポイントクラウドをターゲットポイントクラウドの座標系に持ち込むために、すなわち、ターゲットポイントクラウドとのアライメントのために、ソースポイントクラウドに変換を適用することを含む。
【0010】
一用途例として、例えばLiDAR(Light Detection and Ranging,光検出及び測距)などのセンサから取得される連続したポイントクラウドフレームをレジストレーションすることにより、ロボット/車両は、それらの位置及び向きを正確に推定し、自律的に移動することができる。3Dポイントクラウドレジストレーションの更なる用途は、自律運転、一般的な3Dマッピング及びモデリング、ロボット工学、無人航空機、並びに(例えば、エッジデバイス上での)3Dマップの生成及び/又はリアルタイム更新を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
医用画像処理方法
1か月前
富士通株式会社
ハイブリッド光増幅器
16日前
富士通株式会社
転倒検出方法及び装置
1か月前
富士通株式会社
量子デバイスの製造方法
28日前
富士通株式会社
信号相関量の確定装置と方法
2か月前
富士通株式会社
データセット特徴タイプ推論
2か月前
富士通株式会社
制御装置及び基地局制御方法
1か月前
富士通株式会社
マーキング方法及びプログラム
1か月前
富士通株式会社
量子ビットデバイスの製造方法
1か月前
富士通株式会社
光伝送装置および光伝送システム
2か月前
富士通株式会社
バイアスのための生成人工知能の検査
2か月前
富士通株式会社
ポイントクラウドレジストレーション
28日前
富士通株式会社
情報処理プログラムおよび情報処理方法
2か月前
富士通株式会社
視線誘導方法および視線誘導プログラム
23日前
富士通株式会社
大規模言語モデルを使用したデータ調整
2か月前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
制御プログラム、制御方法及び決済装置
2か月前
富士通株式会社
量子デバイス及び量子デバイスの制御方法
1か月前
富士通株式会社
演算システムおよび演算システムの制御方法
6日前
富士通株式会社
光送信機サブ信号光位相差の確定装置と方法
2か月前
富士通株式会社
生成人工知能を使用したデータセット符号化
9日前
富士通株式会社
無線アクセスネットワークプロビジョニング
2か月前
富士通株式会社
描画プログラム、描画方法および情報処理装置
1か月前
富士通株式会社
シストリック型の演算アレイ装置及び制御方法
今日
富士通株式会社
予測プログラム、予測方法および情報処理装置
今日
富士通株式会社
推定プログラム、推定方法および情報処理装置
27日前
富士通株式会社
学習プログラム、学習方法、及び情報処理装置
1か月前
富士通株式会社
学習プログラム、学習方法および情報処理装置
1か月前
富士通株式会社
推定プログラム、推定方法および情報処理装置
21日前
富士通株式会社
画像を記述する構造化テキストを生成する方法
22日前
富士通株式会社
電源制御回路,情報処理装置および電源制御方法
1か月前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
2か月前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
1か月前
富士通株式会社
演算装置、情報処理装置及び演算装置の制御方法
今日
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ