TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121726
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024017378
出願日
2024-02-07
発明の名称
判定装置、処理システム、搬送システム、判定方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
B25J
13/08 20060101AFI20250813BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】処理効率を向上可能な、判定装置、処理システム、搬送システム、判定方法、プログラム、及び記憶媒体を提供する。
【解決手段】実施形態に係る判定装置は、把持される物体が写された画像を取得する。判定装置は、学習済みの第1モデルを含む判定器に画像を入力する。判定装置は、判定器から、把持部が物体を把持する把持点の取得方法を得る。判定器は、画像の入力に応じて、第1方法、第2方法、又は、第3方法、のいずれかの取得方法を出力する。第1方法では、画像から物体の外形データを算出し、外形データを用いて把持点を算出する。第2方法では、画像を学習済みの第2モデルに入力し、第2モデルから出力された把持点を取得する。第3方法では、指定された把持点を取得する。
【選択図】図1
特許請求の範囲
【請求項1】
把持される物体が写された画像を取得し、
学習済みの第1モデルを含む判定器に前記画像を入力し、
前記判定器から、把持部が前記物体を把持する把持点の取得方法を得る判定装置であって、
前記判定器は、前記画像の入力に応じて、
前記画像から前記物体の外形データを算出し、前記外形データを用いて前記把持点を算出する第1方法、
前記画像を学習済みの第2モデルに入力し、前記第2モデルから出力された前記把持点を取得する第2方法、又は、
指定された前記把持点を取得する第3方法、
のいずれかの前記取得方法を出力する、判定装置。
続きを表示(約 1,300 文字)
【請求項2】
前記判定器は、前記取得方法を出力するとともに、前記物体の状態を、破損の無い正常と、破損の有る異常と、のいずれかに分類する、請求項1に記載の判定装置。
【請求項3】
前記第1モデルは、ニューラルネットワークを含み、
前記第1モデルが、前記取得方法と、前記物体の前記状態の分類結果と、を出力する、請求項2に記載の判定装置。
【請求項4】
請求項1~3のいずれか1つに記載の判定装置と、
前記判定装置によって判定された前記取得方法で、前記把持点を取得する演算装置と、
を備えた処理システム。
【請求項5】
前記把持部を含む搬送装置と、
前記把持部を、前記演算装置によって得られた前記把持点に移動させる制御装置と、
をさらに備えた、請求項4に記載の処理システム。
【請求項6】
前記演算装置とネットワークを介して接続された端末装置をさらに備え、
前記判定装置によって前記第3方法が前記取得方法として判定された場合、前記演算装置は、前記端末装置に前記把持点の指定を要求し、前記端末装置によって指定された前記把持点を受信する、請求項5に記載の処理システム。
【請求項7】
前記端末装置は、前記画像を表示し、前記画像上で前記把持点の指定を受け付ける、請求項6に記載の処理システム。
【請求項8】
前記第2モデルを学習させる学習装置をさらに備え、
前記学習装置は、前記画像と、前記第3方法によって指定された前記把持点と、を用いて前記第2モデルを学習させる、請求項4に記載の処理システム。
【請求項9】
把持部を含み、前記把持部により物体を搬送する搬送装置と、
物体が写された画像を取得し、学習済みの第1モデルを含む判定器に前記画像を入力し、前記判定器から、前記把持部が前記物体を把持する把持点の取得方法を得る判定装置と、
を備え、
前記判定器は、前記画像の入力に応じて、
前記画像から前記物体の外形データを算出し、前記外形データを用いて前記把持点を算出する第1方法、
前記画像を学習済みの第2モデルに入力し、前記第2モデルから出力された前記把持点を取得する第2方法、又は、
指定された前記把持点を取得する第3方法、
のいずれかの前記取得方法を出力する、搬送システム。
【請求項10】
コンピュータに、
把持される物体が写された画像を取得させ、
学習済みの第1モデルを含む判定器に前記画像を入力させ、
前記判定器から、把持部が前記物体を把持するための把持点の取得方法を取得させる、
判定方法であって、
前記判定器は、前記画像の入力に応じて、
前記画像から前記物体の外形データを算出し、前記外形データを用いて前記把持点を算出する第1方法、
前記画像を学習済みの第2モデルに入力し、前記第2モデルから出力された前記把持点を取得する第2方法、又は、
指定された前記把持点を取得する第3方法、
のいずれかの前記取得方法を出力する、判定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、判定装置、処理システム、搬送システム、判定方法、プログラム、及び記憶媒体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物体を把持して搬送する装置がある。搬送装置による処理効率を向上できる技術が求められている。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2023/205184号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、処理効率を向上可能な、判定装置、処理システム、搬送システム、判定方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る判定装置は、把持される物体が写された画像を取得する。前記判定装置は、学習済みの第1モデルを含む判定器に前記画像を入力する。前記判定装置は、前記判定器から、把持部が前記物体を把持する把持点の取得方法を得る。前記判定器は、前記画像の入力に応じて、第1方法、第2方法、又は、第3方法、のいずれかの前記取得方法を出力する。前記第1方法では、前記画像から前記物体の外形データを算出し、前記外形データを用いて前記把持点を算出する。前記第2方法では、前記画像を学習済みの第2モデルに入力し、前記第2モデルから出力された前記把持点を取得する。前記第3方法では、指定された前記把持点を取得する。
【図面の簡単な説明】
【0006】
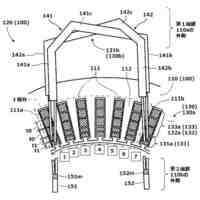
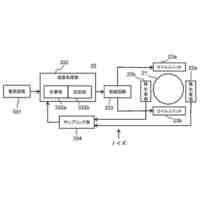
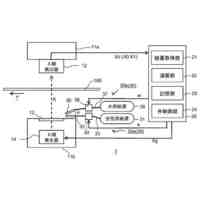
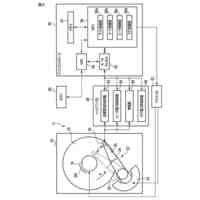
図1は、実施形態に係る処理システムの構成を示す模式図である。
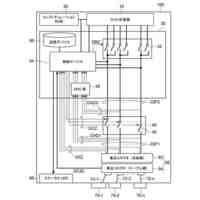
図2は、処理システムの具体的構成を例示する模式図である。
図3は、判定器の一例を示す模式図である。
図4は、判定器の別の一例を示す模式図である。
図5(a)及び図5(b)は、判定器の学習方法の一例を示す模式図である。
図6は、物体の外形データの算出方法を模式的に例示する斜視図である。
図7は、物体の外形データの算出方法を模式的に例示する平面図である。
図8は、接触面の中心と物体の重心との距離を示す距離データについて説明するための模式図である。
図9は、吸着機構が物体を把持するときの様子を示す模式図である。
図10は、挟持機構が物体を把持する際の様子を示す模式図である。
図11は、第2モデルを例示する模式図である。
図12は、グラフィカルユーザインターフェースの一例を示す模式図である。
図13(a)及び図13(b)は、グラフィカルユーザインターフェースの一例を示す模式図である。
図14は、グラフィカルユーザインターフェースの一例を示す模式図である。
図15(a)~図15(c)は、グラフィカルユーザインターフェースの一例を示す模式図である。
図16は、実施形態に係る処理方法を例示するフローチャートである。
図17は、実施形態の第1変形例に係る処理方法を示すフローチャートである。
図18は、実施形態の変形例に係る処理システムの構成を示す模式図である。
図19は、ハードウェア構成を表す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
図1は、実施形態に係る処理システムの構成を示す模式図である。
実施形態に係る処理システム1は、判定装置10、記憶装置15、演算装置20、センサ30、制御装置40、搬送装置50、及び端末装置60を含む。
【0009】
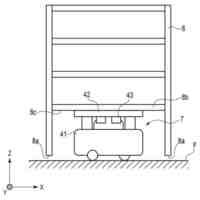
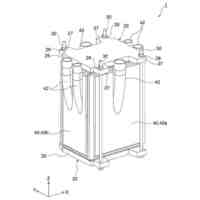
搬送装置50は、物体を搬送可能である。例えば、搬送装置50は、ある容器に収容されている物体を把持する。搬送装置50は、把持した物体を持ち上げ、別の容器までその物体を搬送する。搬送装置50は、その別の容器の中で把持した物体を解放する。物体は、容器の中に載置され、収容される。ここでは、把持、搬送、及び載置を含む一連の動作を、「ピッキング」と呼ぶ。例えば、搬送装置50は、ピッキングロボットである。
【0010】
搬送装置50は、把持部55を含む。把持部55は、挟持、吸着、又はジャミングなどにより、物体を把持可能である。把持部55は、挟持のための機構と、吸着のための機構と、の両方を備え、いずれかの機構が選択的に用いられても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
センサ
28日前
株式会社東芝
固定子
11日前
株式会社東芝
センサ
4日前
株式会社東芝
センサ
3か月前
株式会社東芝
回路素子
27日前
株式会社東芝
遮断装置
2か月前
株式会社東芝
ドア構造
14日前
株式会社東芝
搬送装置
2か月前
株式会社東芝
立て看板
2か月前
株式会社東芝
電子機器
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
配線治具
1か月前
株式会社東芝
制御装置
3か月前
株式会社東芝
燃料電池
1か月前
株式会社東芝
判定装置
2か月前
株式会社東芝
電磁流量計
1か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
ラック装置
7日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
電動送風機
5日前
株式会社東芝
X線厚み計
1か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
ディスク装置
2か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
21日前
株式会社東芝
スイッチギヤ
2か月前
株式会社東芝
計測システム
20日前
株式会社東芝
電力変換装置
25日前
株式会社東芝
区分システム
3か月前
株式会社東芝
開発支援装置
15日前
株式会社東芝
異常検出装置
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ