TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116959
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011518
出願日
2024-01-30
発明の名称
制御対象に対する予測制御のための学習装置、制御装置、機械学習プログラム、制御プログラム、機械学習方法、および制御方法
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G06N
20/00 20190101AFI20250804BHJP(計算;計数)
要約
【課題】制御対象に対する予測制御の信頼性を向上させる。
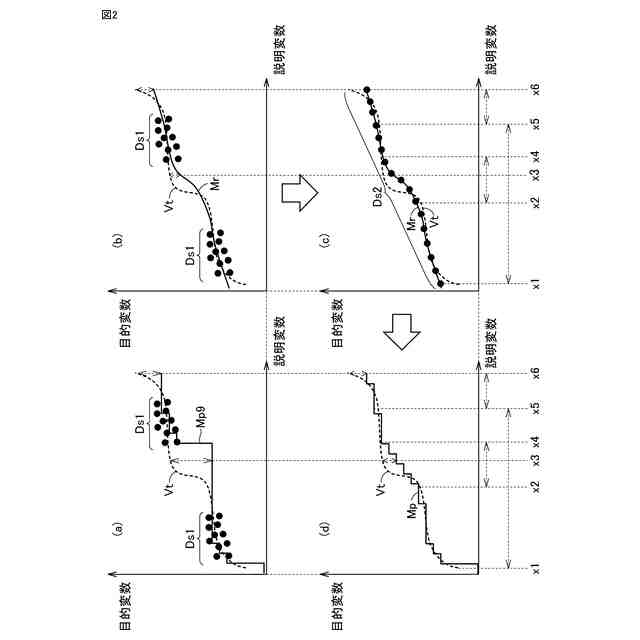
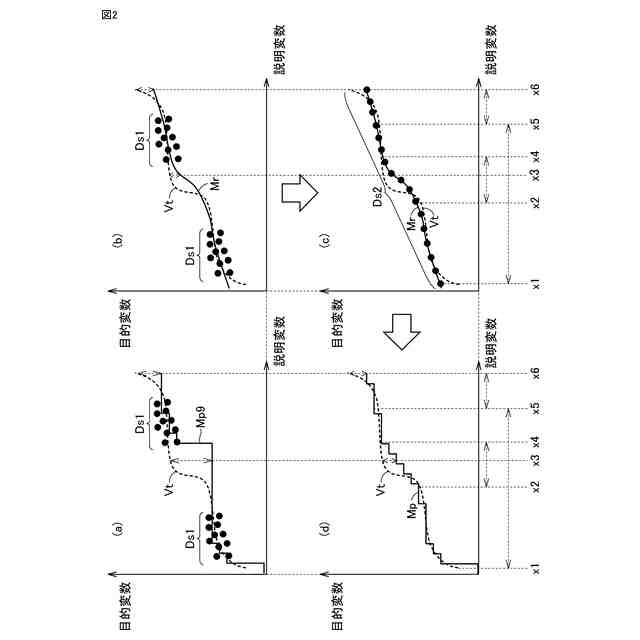
【解決手段】学習装置は、第1学習データセットDs1を用いる第1学習アルゴリズムによって、事前学習モデルMrを生成する。第1学習データセットDs1に含まれる各学習データは、外乱の計測値と、外乱に対応する補正値とを含む。学習装置は、事前学習モデルMrに対する入力と、当該入力に対応する事前学習モデルMrの出力とを含む第2学習データセットDs2を用いる第2学習アルゴリズムによって、予測モデルMpを生成する。事前学習モデルMrの出力は、当該出力の信頼度を定義可能な特定情報を含む。
【選択図】図2
特許請求の範囲
【請求項1】
外乱を受ける制御対象への操作量の補正値を予測する予測モデルに対する機械学習のための学習装置であって、
第1学習データセットが保存された第1記憶部と、
前記第1学習データセットを用いる第1学習アルゴリズムによって、事前学習モデルを生成する学習部とを備え、
前記第1学習データセットに含まれる各学習データは、前記外乱の計測値と、前記外乱に対応する前記補正値とを含み、
前記学習部は、前記事前学習モデルに対する入力と、当該入力に対応する前記事前学習モデルの出力とを含む第2学習データセットを用いる第2学習アルゴリズムによって、前記予測モデルを生成し、
前記事前学習モデルの出力は、当該出力の信頼度を定義可能な特定情報を含む、学習装置。
続きを表示(約 1,700 文字)
【請求項2】
前記学習部は、前記予測モデルの入力の範囲において、前記信頼度が第1閾値より大きい第1範囲および前記信頼度が第2閾値より小さい第2範囲を特定し、前記第1範囲および前記第2範囲を出力する、請求項1に記載の学習装置。
【請求項3】
前記第2学習データセットに含まれる前記事前学習モデルに対する入力のすべては、前記第1範囲に含まれている、請求項2に記載の学習装置。
【請求項4】
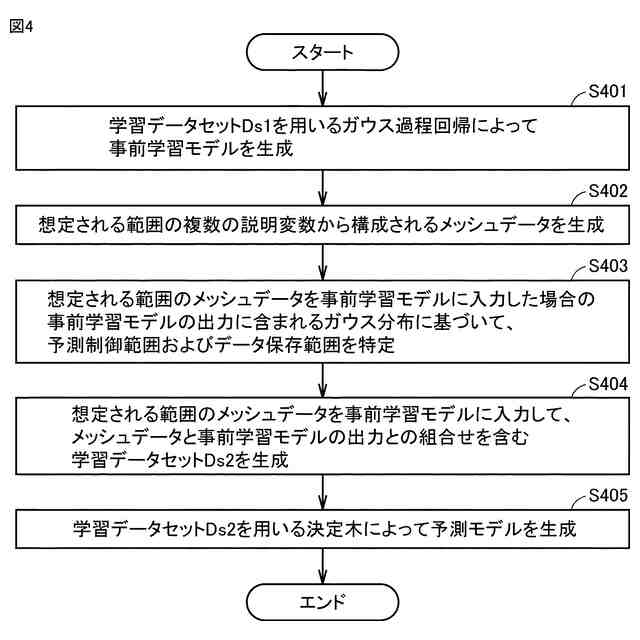
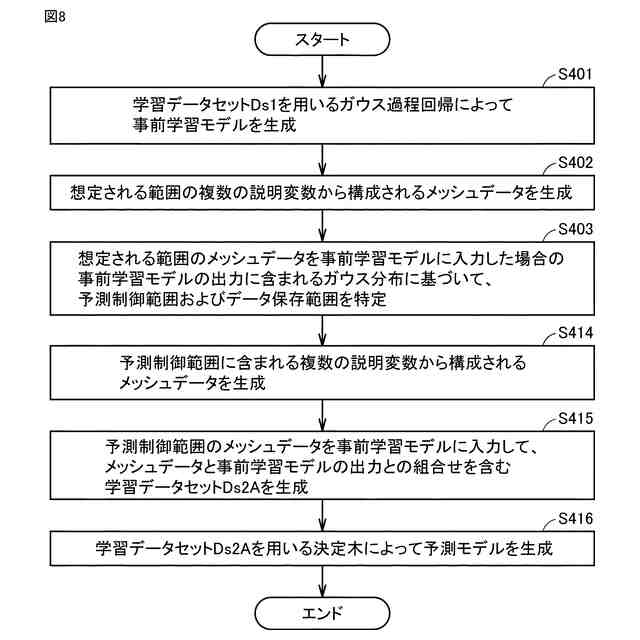
前記第1学習アルゴリズムは、ガウス過程回帰を含み、
前記特定情報は、ガウス分布を含み、
前記第2学習アルゴリズムは、決定木を含む。請求項1~3のいずれか1項に記載の学習装置。
【請求項5】
請求項2または3に記載の学習装置によって生成された前記予測モデルを用いて前記制御対象を制御するための制御装置であって、
制御部と、
第2記憶部とを備え、
前記制御部は、
前記信頼度が前記第1閾値より大きい場合、前記予測モデルの出力を用いて前記操作量を補正して前記制御対象を制御し、
前記信頼度が前記第1閾値より小さい場合、前記操作量を補正せずに前記制御対象を制御する、制御装置。
【請求項6】
前記制御部は、前記信頼度が前記第2閾値より小さい場合、前記予測モデルの入力および出力を前記第2記憶部に保存する、請求項5に記載の制御装置。
【請求項7】
請求項2または3に記載の学習装置によって生成された前記予測モデルを用いて前記制御対象を制御するための制御プログラムであって、前記制御プログラムは、プロセッサによって実行されると、前記プロセッサに、
前記信頼度が前記第1閾値より大きい場合、前記予測モデルの出力を用いて前記操作量を補正して前記制御対象を制御させ、
前記信頼度が前記第1閾値より小さい場合、前記操作量を補正せずに前記制御対象を制御させる、制御プログラム。
【請求項8】
請求項2または3に記載の学習装置によって生成された前記予測モデルを用いて前記制御対象を制御するための制御方法であって、
前記信頼度が前記第1閾値より大きい場合、前記予測モデルの出力を用いて前記操作量を補正して前記制御対象を制御するステップと、
前記信頼度が前記第1閾値より小さい場合、前記操作量を補正せずに前記制御対象を制御するステップとを含む、制御方法。
【請求項9】
外乱を受ける制御対象への操作量の補正値を予測する予測モデルに対する機械学習のための機械学習プログラムであって、前記機械学習プログラムは、プロセッサによって実行されると、前記プロセッサに、
第1学習データセットを用いる第1学習アルゴリズムによって、事前学習モデルを生成させ、
前記第1学習データセットに含まれる各学習データは、前記外乱の計測値と、前記外乱に対応する前記補正値とを含み、前記機械学習プログラムは、前記プロセッサにさらに、
前記事前学習モデルに対する入力と、当該入力に対応する前記事前学習モデルの出力とを含む第2学習データセットを用いる第2学習アルゴリズムによって、前記予測モデルを生成させ、
前記事前学習モデルの出力は、当該出力の信頼度を定義可能な特定情報を含む、機械学習プログラム。
【請求項10】
外乱を受ける制御対象への操作量の補正値を予測する予測モデルに対する機械学習のための機械学習方法であって、
第1学習データセットを用いる第1学習アルゴリズムによって、事前学習モデルを生成するステップを含み、
前記第1学習データセットに含まれる各学習データは、前記外乱の計測値と、前記外乱に対応する前記補正値とを含み、前記機械学習方法はさらに、
前記事前学習モデルに対する入力と、当該入力に対応する前記事前学習モデルの出力とを含む第2学習データセットを用いる第2学習アルゴリズムによって、前記予測モデルを生成するステップを含み、
前記事前学習モデルの出力は、当該出力の信頼度を定義可能な特定情報を含む、機械学習方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御対象に対する予測制御のための学習装置、制御装置、機械学習プログラム、制御プログラム、機械学習方法、および制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、制御対象に対して予測制御を行う構成が知られている。たとえば、特開2022-139055号公報(特許文献1)には、設定値に従って、制御対象がツールを通じてワークに作用することによって、ワークの加工をするための制御対象の制御量を制御する制御器と、ワークまたはツールの少なくともいずれかに作用する外乱に応じて、設定値を補正する予測器とを備える制御システムが開示されている。当該予測器は、外乱を入力とし、品質特性値を品質特性目標値とするための設定値を出力する第1の予測モデルに基づいて構築されている。
【0003】
特許文献1には、第1の予測モデルがサポートベクターマシンによって生成されるとともに、決定木モデルによって生成された第2の予測モデルを予測器が有する構成が開示されている。第2の予測モデルに対する機械学習においては、外乱の仮想値と、当該外乱の仮想値について第1の予測モデルが出力する設定値の仮想値との組が教師データとして使用される。第1の予測モデルによって生成された教師データは、機械学習のための良質な教師データであるために、第2の予測モデルに対する機械学習は、演算のためのリソースを多量に要求しないアルゴリズムを用いることができる。
【先行技術文献】
【特許文献】
【0004】
特開2022-139055号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
制御対象に対する制御の運用においては、製品品質の確保という観点、および制御対象の不測の挙動の回避等の観点から、予測モデルの出力に信頼性が認められる場合に限って予測制御を行うことが望ましい。しかしながら、特許文献1においては、予測モデルの予測の信頼性について考慮されていない。
【0006】
本開示は上記のような課題を解決するためになされたものであり、その目的は、制御対象に対する予測制御の信頼性を向上させることである。
【課題を解決するための手段】
【0007】
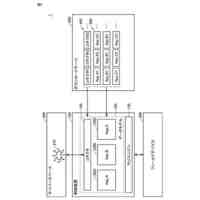
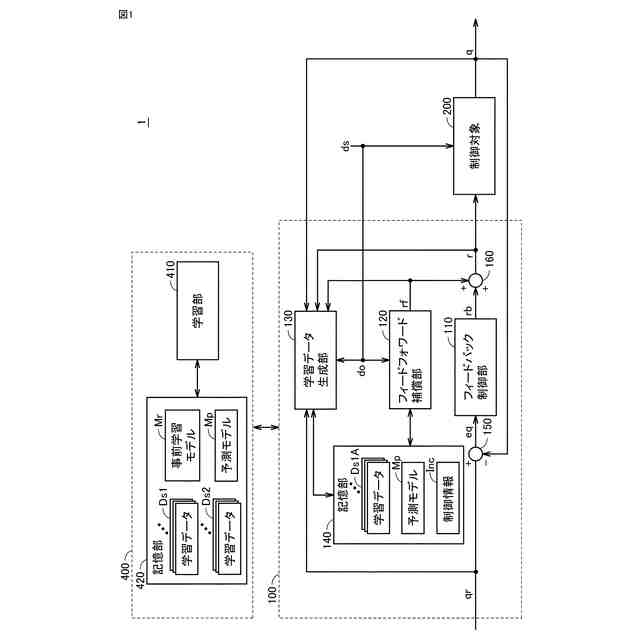
本開示の一局面に係る学習装置は、外乱を受ける制御対象への操作量の補正値を予測する予測モデルに対する機械学習のための学習装置である。学習装置は、第1記憶部と、学習部とを備える。第1記憶部には、第1学習データセットが保存されている。学習部は、第1学習データセットを用いる線形学習アルゴリズムによって、事前学習モデルを生成する。第1学習データセットに含まれる各学習データは、外乱の計測値と、外乱に対応する補正値とを含む。学習部は、事前学習モデルに対する入力と、当該入力に対応する事前学習モデルの出力とを含む第2学習データセットを用いる非線形学習アルゴリズムによって、予測モデルを生成する。事前学習モデルの出力は、当該出力の信頼度を定義可能な特定情報を含む。
【0008】
この開示によれば、予測モデルの出力が当該出力の信頼度を定義可能な特定情報を含むことにより、制御対象に対する予測制御の信頼性を向上させることができる。
【0009】
上記の開示において、学習部は、予測モデルの入力の範囲において、信頼度が第1閾値より大きい第1範囲および信頼度が第2閾値より小さい第2範囲を特定し、第1範囲および第2範囲を出力してもよい。
【0010】
この開示によれば、予測制御の運用において、第1範囲外において予測制御を行わないことにより、予測制御の信頼性をさらに向上させることができる。また、予測制御の運用において、学習データの保存をデータ保存範囲に限定することにより、予測制御のための学習データの収集を効率化することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
制御装置
1か月前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
無停電電源装置
1か月前
オムロン株式会社
電気機器ユニット
1か月前
オムロン株式会社
導線折り曲げ治具
18日前
オムロン株式会社
情報処理システム
1か月前
オムロン株式会社
スイッチング装置
1か月前
オムロン株式会社
充電システム及びモジュール
2か月前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
トルク推定方法及びトルク推定装置
1か月前
オムロン株式会社
回転制御システム及び回転制御方法
18日前
オムロン株式会社
画像処理システムおよび画像処理方法
24日前
オムロン株式会社
非接触給電システム及びその制御方法
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
1か月前
オムロン株式会社
安全監視装置、制御方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
充電器、電力開閉モジュール、充電システム
1か月前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
12日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
24日前
オムロン株式会社
外装ケースユニット、外装ケース及び電気設備
1か月前
オムロン株式会社
整列制御装置、整列制御方法、およびプログラム
1か月前
オムロン株式会社
アンテナ設定方法及びそれを用いた測位システム
1か月前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
28日前
オムロン株式会社
雨滴検出装置の検査装置、検査用治具、検査方法
1か月前
オムロン株式会社
情報処理システム、情報処理方法及びプログラム
12日前
オムロン株式会社
整流回路、整流回路の制御方法、及び電力システム
1か月前
オムロン株式会社
雨滴検出装置およびその補正方法、補正プログラム
1か月前
オムロン株式会社
センサ装置および対象物検知方法、対象物検知プログラム
27日前
オムロン株式会社
支援システム、支援装置、支援方法、及び支援プログラム
26日前
オムロン株式会社
充電計画生成装置、電力開閉モジュール及び充電システム
1か月前
オムロン株式会社
センサ、センサの制御方法、プログラム及び安全監視システム
17日前
オムロン株式会社
制御装置、無人飛行体、飛行制御方法、および飛行制御プログラム
1か月前
オムロン株式会社
電力システム、情報処理装置、電力供給計画作成方法及びプログラム
4日前
オムロン株式会社
ペン型入力装置、描画態様変更方法、および、描画態様変更プログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法、情報処理プログラム、情報処理システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ