TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109177
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024189595
出願日
2024-10-29
発明の名称
白色光干渉計及び白色光干渉計を用いて高さマップを求める方法
出願人
株式会社ミツトヨ
代理人
弁理士法人創光国際特許事務所
主分類
G01B
9/0209 20220101AFI20250716BHJP(測定;試験)
要約
【課題】既知の方法と比較して低減された振動依存性を有する試料の試料表面の高さマップを決定するための改善された方法を提供する。
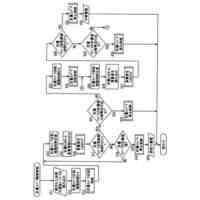
【解決手段】高さマップを決定するステップは、
最も大きな固有値に関連する共分散行列の固有ベクトルに対してヒルベルト変換を実行することにより、複素ヒルベルト変換された固有ベクトルを得るステップと、
複数の画素のうち基準画素の基準位相を決定するステップであって、前記基準画素に対応するヒルベルト変換された固有ベクトルの実部のベクトル成分と虚部のベクトル成分との比に基づいて前記基準位相を決定するステップと、
前記基準画素の測定された位相が前記基準画素の前記基準位相に対応するかどうかを決定するステップと、
前記基準画素の測定された位相が前記基準位相に対応しない場合、測定された位相のグローバル符号を反転させるステップと、を有する方法。
【選択図】なし
特許請求の範囲
【請求項1】
広帯域光源と複数の画素を有する光学センサとを備える白色光干渉計を使用して、白色光干渉法によって試料表面の高さマップを決定するための方法であって、
前記光学センサの焦点面を通るように前記試料表面を垂直走査することによって複数の干渉波を取得するステップであって、前記干渉波のそれぞれは、前記焦点面に対する前記試料表面のそれぞれの高さにおける前記光学センサの対応する画素について測定された光強度を含むステップと、
前記複数の干渉波に対する共分散行列を決定するステップと、
前記共分散行列の特異値分解を実行することによって前記複数の干渉波の主成分を決定するステップと、
前記共分散行列の最大固有値に関連する第1の主成分と、前記共分散行列の第2の最大固有値に関連する第2の主成分と、を選択するステップと、
前記複数の画素のそれぞれの画素に対応する前記第1の主成分のベクトル成分と前記第2の主成分のベクトル成分の比に基づいて、前記複数の画素のそれぞれの画素に対して測定された位相を決定するステップと、
前記それぞれの画素に対して測定された位相に基づいて前記高さマップを決定するステップと、
を有し、
前記高さマップを決定するステップは、
最も大きな固有値に関連する共分散行列の固有ベクトルに対してヒルベルト変換を実行することにより、複素ヒルベルト変換された固有ベクトルを得るステップと、
前記複数の画素のうち基準画素の基準位相を決定するステップであって、前記基準画素に対応するヒルベルト変換された固有ベクトルの実部のベクトル成分と虚部のベクトル成分との比に基づいて前記基準位相を決定するステップと、
前記基準画素の測定された位相が前記基準画素の前記基準位相に対応するかどうかを決定するステップと、
前記基準画素の測定された位相が前記基準位相に対応しない場合、測定された位相のグローバル符号を反転させるステップと、を有する方法。
続きを表示(約 2,900 文字)
【請求項2】
前記基準画素の測定された位相が前記基準画素の前記基準位相に対応するかどうかを決定するステップは、
測定された位相と前記基準画素の前記基準位相との和の大きさを計算し、測定された位相と前記基準画素の前記基準位相との差の大きさを計算するステップと、
前記差の大きさが前記和の大きさより小さい場合、前記基準画素の測定された位相が前記基準位相に対応すると決定し、前記差の大きさが前記和の大きさより大きい場合、前記基準画素の測定された位相が前記基準位相に対応しないと決定するステップと、
を有する、請求項1に記載の方法。
【請求項3】
広帯域光源と複数の画素を有する光学センサとを備える白色光干渉計を使用して、白色光干渉法によって試料の表面の高さマップを決定するための方法であって、
前記光学センサの焦点面を通るように前記表面を垂直走査することによって複数の干渉波を取得するステップであって、前記干渉波のそれぞれは、前記表面に対するそれぞれの高さにおける前記光学センサの対応する画素について測定された光強度を含むステップと、
前記複数の干渉波に対する共分散行列を決定するステップと、
前記共分散行列の特異値分解を実行することによって前記複数の干渉波の主成分を決定するステップと、
前記共分散行列の最大固有値に対応する第1の主成分と、前記共分散行列の第2の最大固有値に対応する第2の主成分と、を選択するステップと、
前記複数の画素のそれぞれの画素に対応する前記第1の主成分のベクトル成分と前記第2の主成分のベクトル成分の比に基づいて、前記複数の画素のそれぞれの画素に対して測定された位相を決定するステップと、
前記それぞれの画素に対して測定された位相に基づいて前記高さマップを決定するステップと、を有し、
前記高さマップを決定するステップは、
前記最大固有値に対応する前記共分散行列の第1の固有ベクトルのフーリエ変換を行い、前記第2の最大固有値に対応する前記共分散行列の第2の固有ベクトルのフーリエ変換を行うステップと、
フーリエ変換された前記第1の固有ベクトルの最高振幅周波数を決定するステップと、
決定された前記最高振幅周波数に対応する、フーリエ変換された前記第1の固有ベクトルの第1のフーリエ位相と、フーリエ変換された前記第2の固有ベクトルの第2のフーリエ位相とを計算するステップと、
前記第1のフーリエ位相から前記第2のフーリエ位相を減算することによって、前記第1のフーリエ位相と前記第2のフーリエ位相との間の差を決定するステップと、
前記第1のフーリエ位相と前記第2のフーリエ位相との間の差が2πを法とする0とπとの間にある場合、測定された位相のグローバル符号を反転させるステップと、を有する方法。
【請求項4】
前記第1の主成分のベクトル成分と前記第2の主成分のベクトル成分との比は、前記第2の主成分のベクトル成分を前記第1の主成分のベクトル成分で除算した値に比例する、
請求項1から3のいずれか1項に記載の方法。
【請求項5】
前記共分散行列を決定するステップは、前記複数の干渉波の平均強度を除去するステップを含む、請求項1から3のいずれか1項に記載の方法。
【請求項6】
前記共分散行列を決定するステップは、前記複数の干渉波を表す3次元M×N×Z行列を2次元M*N×Z行列に変形することを含み、前記光学センサはM×N画素を有し、前記複数の干渉波はZ個の干渉波を含む、
請求項1から3のいずれか1項に記載の方法。
【請求項7】
前記それぞれの画素に対して測定された位相に基づいて前記高さマップを決定するステップは、決定された前記測定された位相に前記広帯域光源の中心波長を乗算するステップを含む、
請求項1から3のいずれか1項に記載の方法。
【請求項8】
広帯域光源と、画素を備える光学センサと、試料の表面の高さマップを取得するためのプロセッサと、を備える白色光干渉計であって、前記プロセッサは、請求項1から3のいずれか1項に記載の方法を実行するように構成される、白色光干渉計。
【請求項9】
前記白色光干渉計は、
前記光学センサの焦点面を通るように前記表面を垂直走査することによって複数の干渉波を取得するステップであって、前記干渉波のそれぞれは、前記表面に対するそれぞれの高さにおける前記光学センサの対応する画素について測定された光強度を含むステップを実行するように構成されており、
前記プロセッサは、
前記複数の干渉波に対する共分散行列を決定するステップと、
前記共分散行列の特異値分解を実行することによって前記複数の干渉波の主成分を決定するステップと、
前記共分散行列の最大固有値に関連する第1の主成分と、前記共分散行列の第2の最大固有値に関連する第2の主成分と、を選択するステップと、
前記複数の画素のそれぞれの画素に対応する前記第1の主成分のベクトル成分と前記第2の主成分のベクトル成分の比の逆正接を算出することによって、前記複数の画素のそれぞれの画素に対して測定された位相を決定するステップと、
前記それぞれの画素に対して測定された位相に基づいて前記高さマップを決定するステップと、を実行するように構成され、
前記高さマップを決定するステップは、
最も大きな固有値に関連する共分散行列の固有ベクトルに対してヒルベルト変換を実行することにより、複素ヒルベルト変換された固有ベクトルを得るステップと、
前記複数の画素のうち基準画素の基準位相を決定するステップであって、前記基準画素に対応するヒルベルト変換された固有ベクトルの実部のベクトル成分と虚部のベクトル成分との比に基づいて前記基準位相を決定するステップと、
前記基準画素の測定された位相が前記基準画素の前記基準位相に対応するかどうかを決定するステップと、
前記基準画素の測定された位相が前記基準位相に対応しない場合、測定された位相のグローバル符号を反転させるステップと、を有する、
請求項8に記載の白色光干渉計。
【請求項10】
前記プロセッサは、
前記基準画素の測定された位相と前記基準位相との和の大きさを計算し、前記基準画素の測定された位相と前記基準位相との差の大きさを計算するステップと、
前記差の大きさが和の大きさより小さい場合、前記基準画素の測定された位相が前記基準位相に対応すると決定し、前記差の大きさが和の大きさより大きい場合、前記基準画素の測定された位相が前記基準位相に対応しないと決定するステップと、を実行するように構成される、
請求項9に記載の白色光干渉計。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
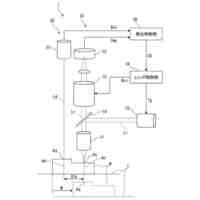
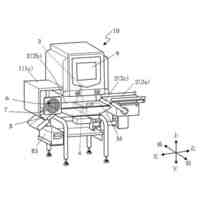
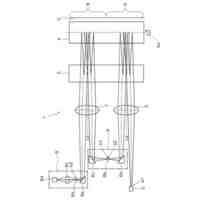
本発明は、白色光干渉法によって試料(sample)の表面の高さマップを決定する方法であって、広帯域光源と複数の画素を有する光学センサとを備える白色光干渉計を使用する方法に関する。本発明はさらに、広帯域光源と、複数の画素を有する光学センサと、本発明の方法を実行するように構成されたプロセッサとを備える白色光干渉計に関する。本発明はさらに、本発明による白色光干渉計のプロセッサ上で実行されると、白色光干渉計に本発明による方法を実行させるコンピュータプログラムを含むデジタルデータキャリアに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
白色光干渉法は、試料の表面の高さマップを決定するための標準的な技術である。白色光干渉法は、約1nmの非常に高い精度を可能にし得る。高さマップを決定するための白色光干渉法の例は、欧州特許第2314982号に見出すことができ、その例においてはゼロ位相交差法が使用されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
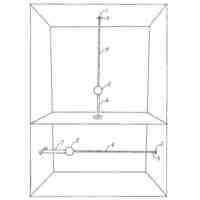
高さマップの測定における測定精度への要求の高まりに伴い、例えば高さマップの決定に使用される場合、白色光干渉法の精度を高める必要性が生じる。試料の高さマップを決定するために白色光干渉計を使用することの欠点は、白色光干渉計に対する試料の振動が、決定された高さマップに不正確さを引き起こし得ることである。白色光干渉計は、干渉計内の光路に沿って進行する光の光路長の違いによる反射光の位相差を決定することに依存する。光路長は、試料の振動によって影響を受ける可能性があり、これは次に位相差に影響を与えるので不正確な高さマップをもたらす。
【0004】
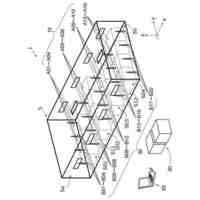
白色光干渉計に対する試料の振動は、試料ホルダの不安定性に起因して生じ得る。試料ホルダは、例えば車両又は人が動くことに起因する、白色光干渉計の周囲からの様々な種類の振動の影響を受ける可能性がある。試料ホルダはまた、実験室又は製造環境に典型的に存在するような他の機器の存在から生じ得る振動によって影響され得る。
【0005】
試料に対する振動の影響を排除するのに十分な注意が払われない場合、決定された高さマップの精度が悪影響を受けることがある。場合によっては、決定された高さマップは、その誤差が大きすぎるため役に立たない場合がある。振動は、白色光干渉計の結果の全体的な精度、信頼性、及び再現性に影響を及ぼし得る。
【0006】
白色光干渉計の結果に対する振動の影響を低減する既知の方法として、環境の振動の影響から白色光干渉計を隔離するための振動ダンパーを使用する方法等がある。これらの既知の方法の欠点は、全体的なコストの増加である。また、ダンパーの種類や振動の種類によっては、振動の影響を十分に低減できない場合がある。
【0007】
振動に対する依存性が低減された試料の試料表面の高さマップを決定する方法が必要とされている。
【0008】
本発明の目的は、既知の方法と比較して低減された振動依存性を有する試料の試料表面の高さマップを決定するための改善された方法を提供することである。本発明のさらなる目的は、既知の方法と比較して低減された振動依存性を有する試料の試料表面の高さマップを決定するための代替方法を提供することである。
【課題を解決するための手段】
【0009】
本発明の目的は、請求項1に記載の方法によって達成される。
本発明は、複数の干渉波(stack of interferograms)の主成分分析に基づくアルゴリズムを使用することにより、例えば振動により生じるランダム位相シフトのように、使用される干渉波におけるランダム位相シフトへの依存性を低減するための高さマップを決定する方法が可能になるという洞察に依拠する。主成分分析に基づく方法は、試料の高さに関連する位相シフトからランダム位相シフトを分離することを可能にする。試料の高さに関連する位相シフトは、本明細書において、測定された位相と記載される。結果として、本発明は、振動の影響を低減するための既知の方法を使用して高さマップを決定するための既知の方法と比較して、高さマップを決定する改善された又は代替の方法を可能にする。
【0010】
本発明は、白色光干渉法によって試料の試料表面の高さマップを決定する方法に関する。試料表面の高さマップは、試料表面の粗さを決定するために決定され得る。試料表面の高さマップはさらに、例えば製造プロセスの品質管理を提供するために決定されてもよい。白色光干渉法は、表面プロファイルを有する表面の表面高さ測定のための非接触光学方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツトヨ
画像検出装置および自動焦点調整方法
21日前
株式会社ミツトヨ
データ処理装置、測定システム、データ処理方法及びプログラム
14日前
株式会社ミツトヨ
表面マップを決定するための方法およびそのための撮像システム
1か月前
個人
計量スプーン
15日前
個人
微小振動検出装置
26日前
株式会社イシダ
X線検査装置
26日前
三菱電機株式会社
計測器
1か月前
株式会社辰巳菱機
システム
1か月前
アンリツ株式会社
分光器
21日前
株式会社FRPカジ
FRP装置
1か月前
トヨタ自動車株式会社
表示装置
7日前
ダイハツ工業株式会社
測定用具
19日前
株式会社東芝
センサ
26日前
アンリツ株式会社
分光器
21日前
株式会社カワタ
サンプリング装置
1か月前
TDK株式会社
ガスセンサ
29日前
学校法人立命館
液面レベルセンサ
1か月前
株式会社ヨコオ
コンタクタ
19日前
大和製衡株式会社
組合せ計量装置
1か月前
TDK株式会社
磁気センサ
22日前
株式会社ナリス化粧品
角層細胞採取用具
5日前
TDK株式会社
磁気センサ
15日前
株式会社精工技研
光電圧プローブ
27日前
富士レビオ株式会社
嵌合システム
1か月前
日本精工株式会社
分注装置
1か月前
個人
粘塑性を用いた有限要素法の定式化
7日前
中国電力株式会社
異常箇所検出装置
6日前
富士電機株式会社
半導体パッケージ
15日前
日本碍子株式会社
ガスセンサ
16日前
TDK株式会社
磁気計測装置
6日前
成田空港給油施設株式会社
保持治具
6日前
大同特殊鋼株式会社
超音波探傷方法
15日前
三菱マテリアル株式会社
温度センサ
5日前
個人
材料特性パラメータの算定方法
15日前
大陽日酸株式会社
液面センサ
22日前
三菱マテリアル株式会社
温度センサ
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ