TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025108493
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2025062905,2024206094
出願日
2025-04-07,2020-03-26
発明の名称
LIDARトランシーバ、LIDARシステム及びLIDARチップ
出願人
オーロラ・オペレイションズ・インコーポレイティッド
,
AURORA OPERATIONS, INC.
代理人
個人
,
個人
,
個人
主分類
G01S
7/481 20060101AFI20250715BHJP(測定;試験)
要約
【課題】既存のLIDARシステムは、レーザービームを誘導するために機械的移動部品を使用する。また、多数の用例(例、自動車)では、かさばり、コストがかかり、信頼性が低い。
【解決手段】FMCW LIDARトランシーバは、光集積回路(PIC、Photonic Integrated Circuit)に実装される。FMCW LIDARトランシーバは、スイッチング可能なコヒーレントピクセルアレイを介して、少なくとも1次元で光学ビームステアリングを実行する。一部の実施形態において、FMCW LIDARトランシーバは、アレイ(例えば、線形アレイ、2次元アレイなど)で配列された複数のFMCW LIDARトランシーバを含むLIDARチップの一部である。FMCW LIDARシステムは、トランシーバの視野についての深さ情報(例えば、トランシーバの視野内のオブジェクトまでの距離、オブジェクトの速度など)を決定する。
【選択図】図5a
特許請求の範囲
【請求項1】
車両用の光検出および距離測定(LIDAR)システムであって、前記LIDARシステムは、
光ビームを放出するように構成された光源と、
前記光ビームを送信信号と局部発振器信号に分割するように構成されたスプリッターと、
前記送信信号を環境に放出するように構成された複数のアンテナと、
前記送信信号を受信するように構成されたスイッチングデバイスであって、該スイッチングデバイスは、多層構成で配置された複数の光スイッチを含み、前記送信信号を前記複数のアンテナに順次供給するように動作可能である、スイッチングデバイスと、
を備えており、
前記送信信号が、前記複数のアンテナのそれぞれを介して放出され、前記送信信号の反射が、前記複数のアンテナのそれぞれを介して反射信号として受信される、LIDARシステム。
続きを表示(約 880 文字)
【請求項2】
前記多層構成は、
前記複数の光スイッチの第1グループと、
前記複数の光スイッチの第2グループであって、前記第2グループが、前記第1グループよりも多くの光スイッチを含む、前記複数の光スイッチの第2グループと、
前記複数の光スイッチの第3グループであって、前記第3グループが、前記第2グループよりも多くの光スイッチを含む、前記複数の光スイッチの第3グループと、
を含む、請求項1に記載のLIDARシステム。
【請求項3】
前記第1グループが、1つの光スイッチを含み、
前記第2グループが、2つの光スイッチを含み、
前記第3グループが、4つの光スイッチを含む、請求項2に記載のLIDARシステム。
【請求項4】
前記スイッチングデバイスが、バイナリツリースイッチネットワークを含む、請求項1に記載のLIDARシステム。
【請求項5】
前記複数の光スイッチがそれぞれ、1つ以上の光位相シフタを含む、請求項1に記載のLIDARシステム。
【請求項6】
前記複数の光スイッチがそれぞれ、マイクロリング共振器(MRR)を含む、請求項1に記載のLIDARシステム。
【請求項7】
前記複数の光スイッチがそれぞれ、マイクロ電子機械システム(MEMS)スイッチを含む、請求項1に記載のLIDARシステム。
【請求項8】
前記複数の光スイッチが、独立に制御される、請求項1に記載のLIDARシステム。
【請求項9】
前記複数の光スイッチがそれぞれ、光スイッチごとに2つの制御を使用して電気的に制御されるように構成されている、請求項8に記載のLIDARシステム。
【請求項10】
前記複数の光スイッチがそれぞれ、光スイッチごとに1つの制御のみを使用して電気的に制御される片側光スイッチとして構成されている、請求項8に記載のLIDARシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願についての相互参照
本出願は、その文献の内容全体が参照として含まれている2019年3月29日付出願の米国臨時特許出願第62/826、528号、2019年3月29日付出願の米国臨時特許出願第62/826、536号、2019年5月8日付出願の米国臨時特許出願第62/845、147号、2019年5月8日付出願の米国臨時特許出願第62/845、149号、2019年5月17日付出願の米国臨時特許出願第62/849、807号、2019年11月26日付出願の米国臨時特許出願第62/940、790号の35U.S.C.§119(e)による優先権を主張する。
続きを表示(約 2,600 文字)
【0002】
本開示内容は、概括的に周波数変調連続波(FMCW)光検出および距離測定(ライダ、LIDAR)に関するものであって、より具体的には、FMCW LIDAR用スイッチング可能なコヒーレントピクセルアレイに関するものである。
【背景技術】
【0003】
既存のLIDARシステムは、レーザービームを誘導するために機械的移動部品を使用する。また、多数の用例(例、自動車)では、かさばり、コストがかかり、信頼性が低い。
【発明の概要】
【課題を解決するための手段】
【0004】
FMCW LIDARトランシーバは、光集積回路(PIC、Photonic Integrated Circuit)に実装される。FMCW LIDARトランシーバは、スイッチング可能なコヒーレントピクセルアレイを介して、少なくとも1次元で光学ビームステアリングを実行する。一部の実施形態において、FMCW LIDARトランシーバは、アレイ(例えば、線形アレイ、2次元アレイなど)で配列された複数のFMCW LIDARトランシーバを含むLIDARチップの一部である。FMCW LIDARトランシーバおよび/またはLIDARチップは、FMCW LIDARシステムの一部であり得る。FMCW LIDARシステムは、トランシーバの視野についての深さ情報(例えば、トランシーバの視野内のオブジェクトまでの距離、オブジェクトの速度など)を決定する。
【0005】
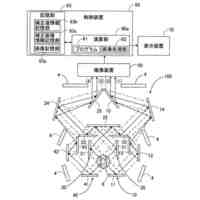
一部の実施形態において、FMCW LIDARトランシーバは、1つ以上のサブアレイを含む。サブアレイは、入力ポート、光スイッチ、複数のスプリッター、複数のミキサー、および複数のアンテナを含み得る。入力ポートは、周波数変調されたレーザー信号を受信するように構成される。光スイッチは、入力ポートを光アンテナにスイッチング可能に結合し、入力ポートと光アンテナとの間に光経路を形成するように構成される。入力ポートから光アンテナのうち、1つの光アンテナを向けたそれぞれの光経路について、複数のスプリッターのうち、いずれか1つのスプリッターが光経路に沿って結合される。それぞれのスプリッターは、レーザー信号の受信された部分を局部発振器信号と送信された信号に分割するように構成される。送信された信号は、光アンテナを介して放出され、送信された信号の反射は、光アンテナを介して反射した信号として受信される。スプリッターは、反射した信号の一部であるリターン信号も出力する。それぞれのスプリッターについて、複数のミキサーのうち、いずれか1つのミキサーがスプリッターからリターン信号および局部発振器信号を受信するように結合される。ミキサーは、トランシーバの視野についての深さ情報を決定するのに使用される1つ以上の出力信号を生成するように、リターン信号と局部発振器信号を混合するように構成される。
【0006】
一部の実施形態において、FMCW LIDARシステムは、LIDARチップを含む。LIDARチップは、光集積回路に実装されたFMCW LIDARトランシーバを含む。光集積回路は、1つ以上のサブアレイを含む。サブアレイは、入力ポート、光スイッチ、複数のスプリッター、複数のミキサー、複数のアンテナを含み得る。入力ポートは、周波数変調されたレーザー信号を受信するように構成される。光スイッチは、入力ポートを光アンテナにスイッチング可能に結合し、入力ポートと光アンテナとの間に光経路を形成するように構成される。入力ポートから光アンテナのうち、1つに向けたそれぞれの光経路について、複数のスプリッターのうち、いずれか1つのスプリッターが光経路に沿って結合される。それぞれのスプリッターは、レーザー信号の受信された部分を局部発振器信号と送信された信号に分割するように構成される。送信された信号は、光アンテナを介して放出され、送信された信号の反射は、光アンテナを介して反射した信号として受信される。スプリッターは、反射した信号の一部であるリターン信号も出力する。それぞれのスプリッターについて、複数のミキサーのうち、いずれか1つのミキサーが結合されてスプリッターからリターン信号および局部発振器信号を受信する。ミキサーは、リターン信号と局部発振器信号を混合し、FMCW LIDARシステムの視野についての深さ情報を決定するのに使用される1つ以上の出力信号を生成するように構成される。FMCW LIDARシステムは、また複数のアンテナを介して放出された送信された信号をコリメートするように配置されたレンズを含む。レンズは、また反射した信号を受信し、反射した信号を放出する光アンテナに結合するように配置される。
【図面の簡単な説明】
【0007】
本開示内容の実施形態は、添付図面の例に関連して取られるときに、以下の詳細な説明および添付された特許請求の範囲からより確実に明らかになる他の利点および特徴を有し、図面において、
【0008】
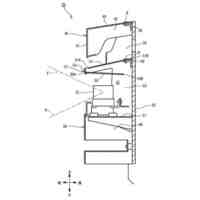
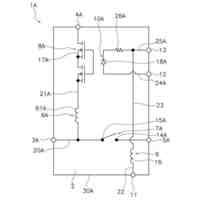
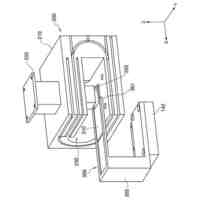
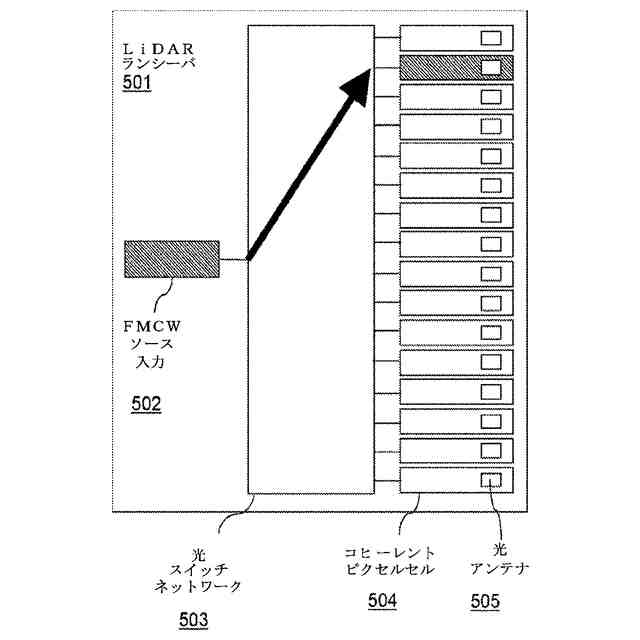
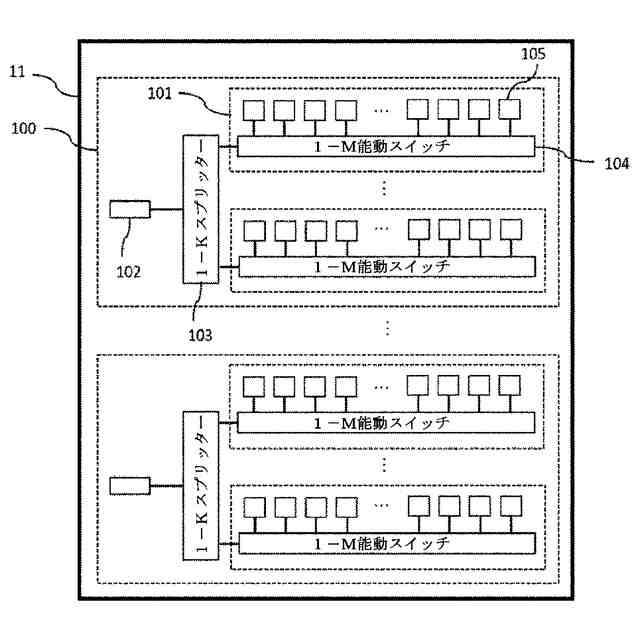
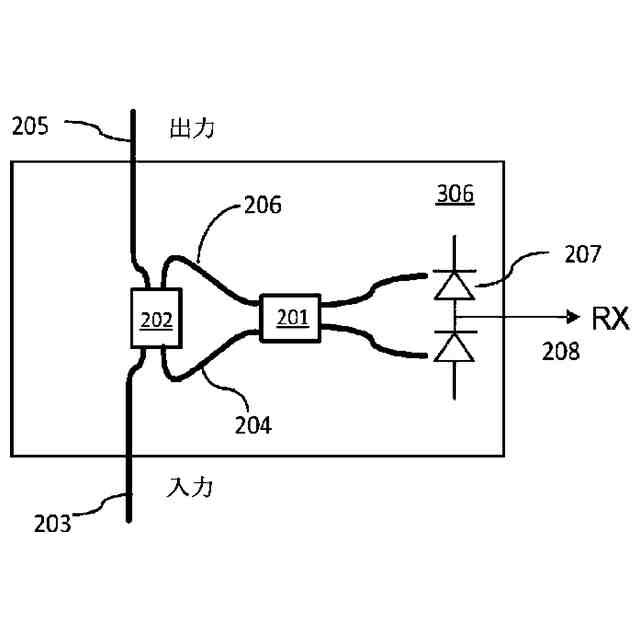
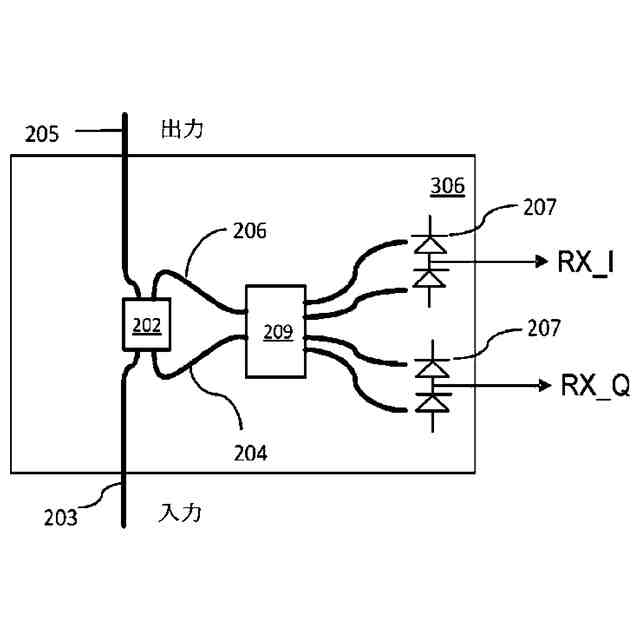
1つ以上の実施形態によるスイッチング可能なコヒーレントピクセルアレイFMCW LIDARチップの概略図を例示する。
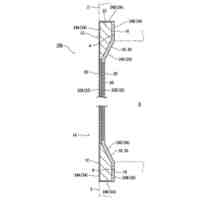
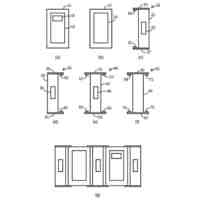
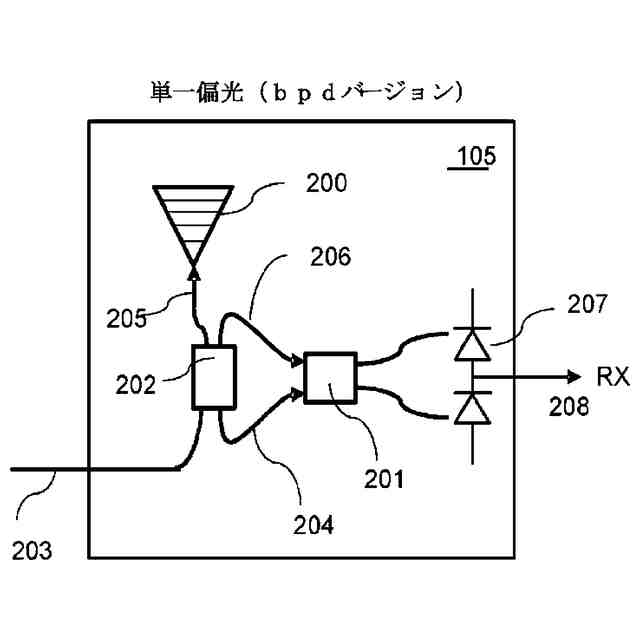
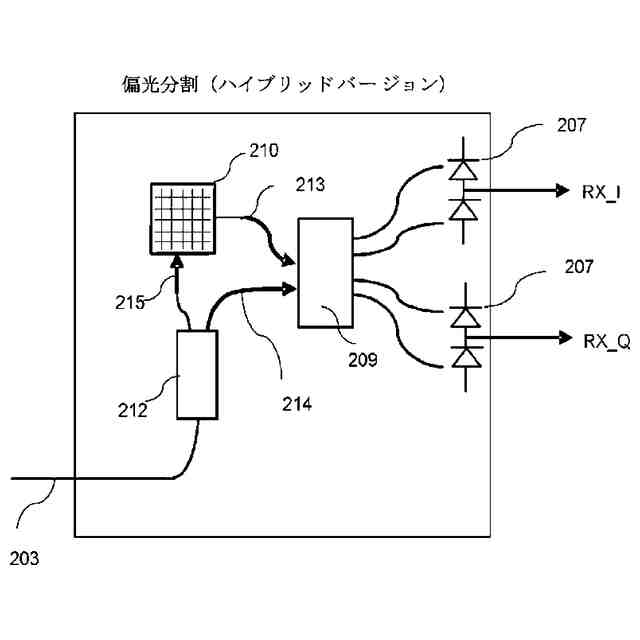
【0009】
1つ以上の実施形態による4つのバージョンのコヒーレントピクセルを例示する。
1つ以上の実施形態による4つのバージョンのコヒーレントピクセルを例示する。
1つ以上の実施形態による4つのバージョンのコヒーレントピクセルを例示する。
1つ以上の実施形態による4つのバージョンのコヒーレントピクセルを例示する。
【0010】
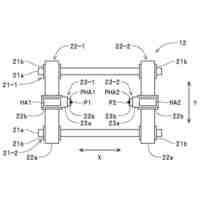
多重コヒーレントピクセルの間に光コヒーレント検出ブロックが共有される1つ以上の実施形態によるスイッチング可能なコヒーレントピクセルアレイを例示する。
多重コヒーレントピクセルの間に光コヒーレント検出ブロックが共有される1つ以上の実施形態によるスイッチング可能なコヒーレントピクセルアレイを例示する。
多重コヒーレントピクセルの間に光コヒーレント検出ブロックが共有される1つ以上の実施形態によるスイッチング可能なコヒーレントピクセルアレイを例示する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
8日前
株式会社ミツトヨ
測定器
1か月前
三菱電機株式会社
計測器
2日前
株式会社豊田自動織機
産業車両
15日前
横浜ゴム株式会社
音響窓
10日前
個人
センサーを備えた装置
12日前
日置電機株式会社
測定装置
9日前
株式会社国際電気
試験装置
22日前
日本精機株式会社
施工管理システム
12日前
IPU株式会社
距離検出装置
8日前
株式会社東芝
センサ
11日前
株式会社田中設備
報知装置
16日前
富士レビオ株式会社
嵌合システム
1日前
株式会社CAST
センサ固定治具
15日前
本多電子株式会社
超音波ソナー装置
3日前
WOTA株式会社
液位検出システム
22日前
株式会社熊平製作所
刃物類判別装置
15日前
タカノ株式会社
試料分析装置
1か月前
アズビル株式会社
火炎状態判定装置
9日前
日本装置開発株式会社
X線検査装置
25日前
富士電機株式会社
半導体パッケージ
4日前
オムロン株式会社
スイッチング装置
22日前
タカノ株式会社
試料分析装置
1か月前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
19日前
トヨタ自動車株式会社
データの補正方法
3日前
已久工業股ふん有限公司
空気圧縮機構造
11日前
東ソー株式会社
クロマトグラムの形状判定方法
4日前
トヨタ自動車株式会社
表面傷の検査方法
10日前
TDK株式会社
磁気検出システム
22日前
テックス理研株式会社
外周検査装置
1か月前
株式会社 ミックウェア
端末装置及びプログラム
17日前
コニカミノルタ株式会社
光学特性測定装置
15日前
愛知時計電機株式会社
超音波流量計
8日前
ミネベアミツミ株式会社
角度センサ
19日前
ミネベアミツミ株式会社
角度センサ
19日前
株式会社東芝
センサ及び電子装置
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ