TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107815
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001281
出願日
2024-01-09
発明の名称
走行管理システム及び走行管理方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/00 20060101AFI20250714BHJP(信号)
要約
【課題】所定エリア内の車両の走行管理において処理負荷が軽減された走行管理システムを提供する。
【解決手段】走行管理システムは、所定エリアに設置され所定エリア内の状況を認識する認識センサと、管理サーバと、を備える。管理サーバは、所定エリア内の車両の通路に関して、車両の走行位置を規定する通行経路を管理するように構成されている。また管理サーバは、認識センサを用いて所定エリア内の物体を検知し、検知された物体と通行経路との位置関係に基づいて、通行経路上の各地点において車両が従うべき車速条件を与える車速プロファイルを算出する処理を実行するように構成されている。また管理サーバは、対象車両の走行を管理するとき、通行経路のうち少なくとも対象車両が走行する走行区間の走行位置と、その走行区間の車速プロファイルと、を対象車両の制御システムに送信するように構成されている。
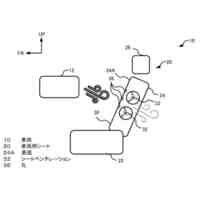
【選択図】図2
特許請求の範囲
【請求項1】
所定エリア内での車両の走行を管理する走行管理システムであって、
前記所定エリアに設置され前記所定エリア内の状況を認識する認識センサと、
管理サーバと、
を備え、
前記管理サーバは、
前記所定エリア内の前記車両の通路に関して、前記車両の走行位置を規定する通行経路を管理し、
前記認識センサを用いて前記所定エリア内の物体を検知し、
検知された前記物体と前記通行経路との位置関係に基づいて、前記通行経路上の各地点において前記車両が従うべき車速条件を与える車速プロファイルを算出する処理を実行し、
対象車両の走行を管理するとき、前記通行経路のうち少なくとも前記対象車両が走行する走行区間の前記走行位置と、前記走行区間の前記車速プロファイルと、を前記対象車両の制御システムに送信する
ように構成されている
走行管理システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の走行管理システムであって、
前記車速条件は、前記車両の最大車速又は目標車速である
走行管理システム。
【請求項3】
請求項2に記載の走行管理システムであって、
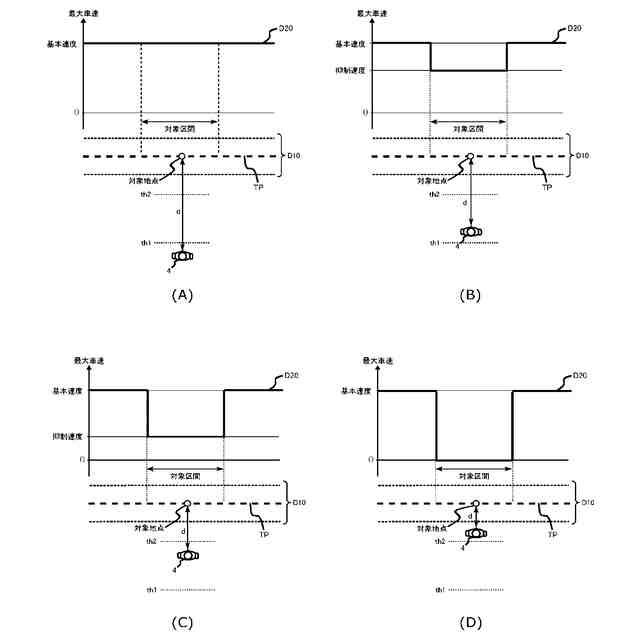
前記車速プロファイルを算出する処理において、前記管理サーバは、
前記物体が検知されていないとき、前記最大車速又は前記目標車速を基本速度とし、
検知された前記物体と前記通行経路上の対象地点との距離が第1しきい値以下となるとき、前記通行経路のうち前記対象地点を含む対象区間における前記最大車速又は前記目標車速を前記基本速度より低い抑制速度とする
ように構成されている
走行管理システム。
【請求項4】
請求項3に記載の走行管理システムであって、
前記車速プロファイルを算出する処理において、前記管理サーバは、
前記距離が前記第1しきい値以下となるとき、前記距離が小さくなるにつれて前記抑制速度を低くする
ように構成されている
走行管理システム。
【請求項5】
請求項3に記載の走行管理システムであって、
前記車速プロファイルを算出する処理において、前記管理サーバは、
前記距離が前記第1しきい値よりも小さい第2しきい値以下となるとき、前記対象区間における前記最大車速又は前記目標車速をゼロとする
ように構成されている
走行管理システム。
【請求項6】
請求項5に記載の走行管理システムであって、
前記管理サーバは、
前記物体の種別を取得し、
前記物体の前記種別に応じて、前記第1しきい値、前記第2しきい値、及び前記抑制速度、の少なくとも1つを変化させる
ように構成される
走行管理システム。
【請求項7】
請求項1乃至6のいずれか1項に記載の走行管理システムであって、
前記管理サーバは、さらに、
前記物体に関して、前記車両の走行に影響を与える影響範囲を算出し、
前記影響範囲が前記通行経路に接するとき、接する区間の前記走行位置を前記影響範囲から遠ざかる方向に移動させる変更が可能であるか否かを判断し、
前記変更が可能であると判断するとき、前記接する区間の前記走行位置を前記影響範囲から遠ざかる方向に移動させる
ように構成される
走行管理システム。
【請求項8】
請求項7に記載の走行管理システムであって、
前記管理サーバは、前記物体が移動物体であるとき、前記影響範囲を前記移動物体の移動予測範囲とする
走行管理システム。
【請求項9】
所定エリア内での車両の走行を管理する走行管理方法であって、
1又は複数のプロセッサと1又は複数の記憶装置との協働により、
前記所定エリア内の前記車両の通路に関して、前記車両の走行位置を規定する通行経路を管理し、
前記所定エリアに設置され前記所定エリア内の状況を認識する認識センサを用いて前記所定エリア内の物体を検知し、
検知された前記物体と前記通行経路との位置関係に基づいて、前記通行経路上の各地点において前記車両が従うべき車速条件を与える車速プロファイルを算出する処理を実行し、
対象車両の走行を管理するとき、前記通行経路のうち少なくとも前記対象車両が走行する走行区間の前記走行位置と、前記走行区間の前記車速プロファイルと、を前記対象車両の制御システムに送信する
ことを含む
走行管理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、所定のエリア内での車両の走行を管理する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、自動運行エリアを走行する自動運転車両を遠隔制御する走行制御装置が開示されている。特許文献1に開示される走行制御装置は、自動運行エリア内に規定される検出範囲の物標を検出するセンシング部と、センシング部の検出する物標の検出情報を用いて検出範囲内を走行する自動運転車両の走行経路を生成する経路生成部と、走行経路に基づく制御指令を自動運転車両に送信する経路送信部と、を備える。
【0003】
その他、本技術分野の技術レベルを示す文献として以下の特許文献2がある。
【先行技術文献】
【特許文献】
【0004】
特開2022-134583号公報
特開2015-074321号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
所定のエリア内の車両の走行を管理する場合、通常、エリア内には走行管理の対象となる複数の車両が存在する。特許文献1に開示される技術では、車両ごとにエリア内で検出される各物体(物標)を考慮した演算が必要となる。このため、走行管理の対象となる車両が多数となると、処理負荷が膨大となるおそれがある。このように、従来、エリア内の車両の走行を管理する技術では処理負荷の高さが課題となっていた。
【0006】
本開示の1つの目的は、上記の課題を鑑みたものであり、エリア内の車両の走行を管理する技術に関して処理負荷を軽減することにある。
【課題を解決するための手段】
【0007】
本開示の第1の観点は、所定エリア内での車両の走行を管理する走行管理システムに関する。走行管理システムは、所定エリアに設置され所定エリア内の状況を認識する認識センサと、管理サーバと、を備える。管理サーバは、所定エリア内の車両の通路に関して、車両の走行位置を規定する通行経路を管理するように構成されている。また管理サーバは、認識センサを用いて所定エリア内の物体を検知し、検知された物体と通行経路との位置関係に基づいて、通行経路上の各地点において車両が従うべき車速条件を与える車速プロファイルを算出する処理を実行するように構成されている。また管理サーバは、対象車両の走行を管理するとき、通行経路のうち少なくとも対象車両が走行する走行区間の走行位置と、その走行区間の車速プロファイルと、を対象車両の制御システムに送信するように構成されている。
【0008】
本開示の第2の観点は、所定エリア内での車両の走行を管理する走行管理方法に関する。走行管理方法は、1又は複数のプロセッサと1又は複数の記憶装置との協働により、所定エリア内の車両の通路に関して、車両の走行位置を規定する通行経路を管理し、認識センサを用いて所定エリア内の物体を検知し、検知された物体と通行経路との位置関係に基づいて、通行経路上の各地点において車両が従うべき車速条件を与える車速プロファイルを算出する処理を実行し、対象車両の走行を管理するとき、通行経路のうち少なくとも対象車両が走行する走行区間の走行位置と、その走行区間の車速プロファイルと、を対象車両の制御システムに送信することを含む。
【発明の効果】
【0009】
本開示によれば、車両の走行位置を規定する通行経路が管理され、所定エリア内で検知された検知物体と通行経路との位置関係に基づいて車速プロファイルが算出される。そして、対象車両の走行管理において、通行経路のうち対象車両が走行する走行区間の走行位置と車速プロファイルが対象車両の制御システムに送信される。これにより、車両ごとに検知された物体を考慮した演算を行うことなく、各車両の走行管理を行うことができる。結果として、走行管理の対象となる車両が多くなるときでも、処理負荷の増加を抑制して処理負荷を軽減することができる。
【図面の簡単な説明】
【0010】
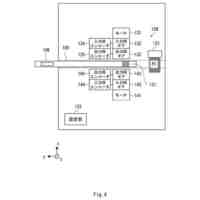
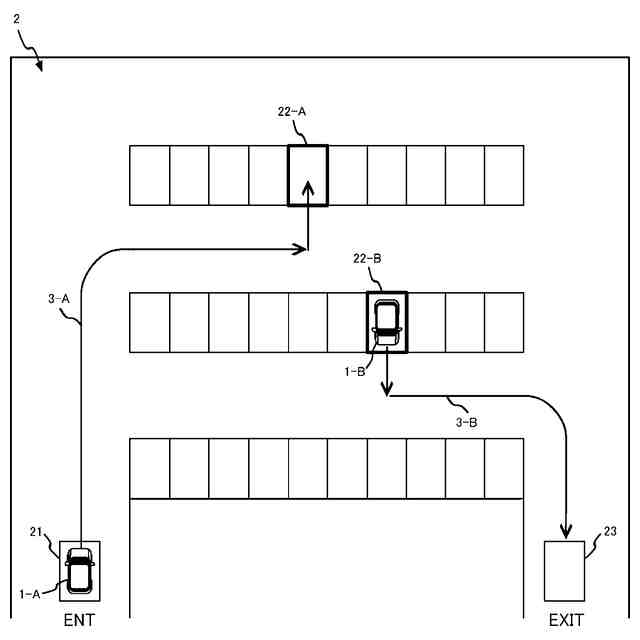
AVPシステムとしての走行管理システムが行う車両の走行管理の一例について説明するための概念図である。
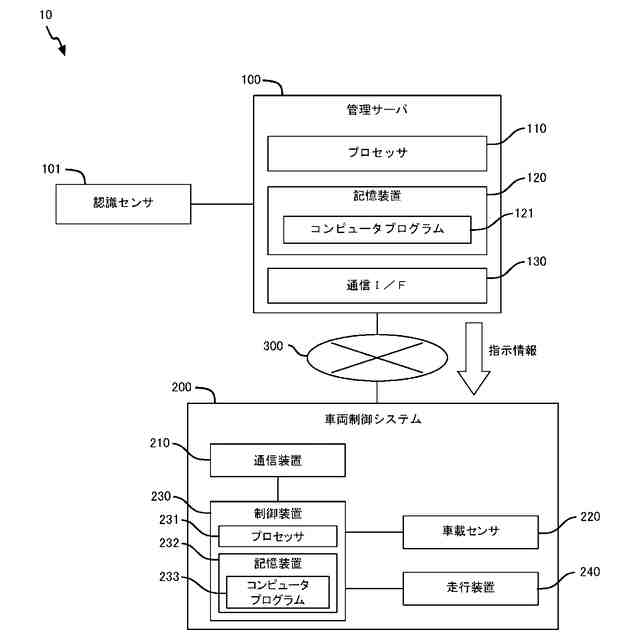
実施の形態に係る走行管理システムの構成の一例を示す図である。
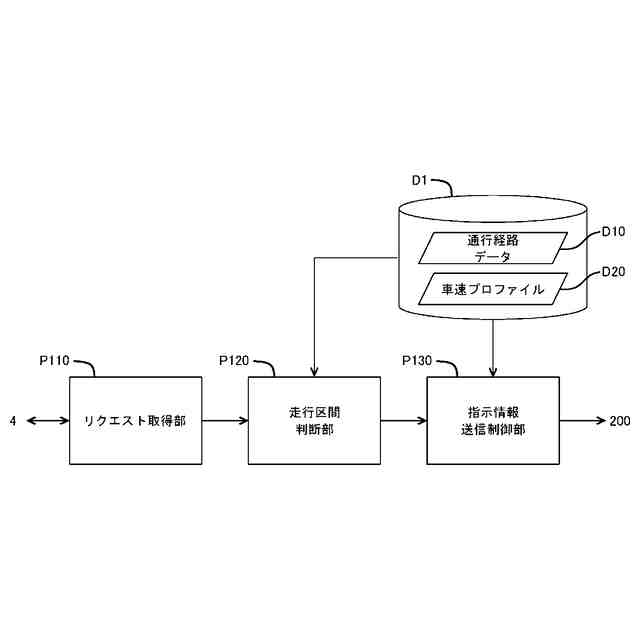
指示情報を送信する機能に関連する管理サーバの機能構成の一例を示すブロック図である。
通行経路データの一例を示す概念図である。
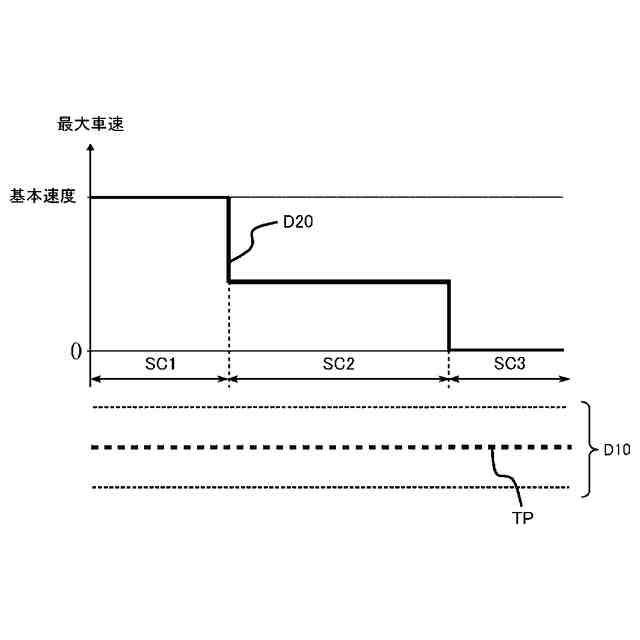
車速プロファイルの一例を示す概念図である。
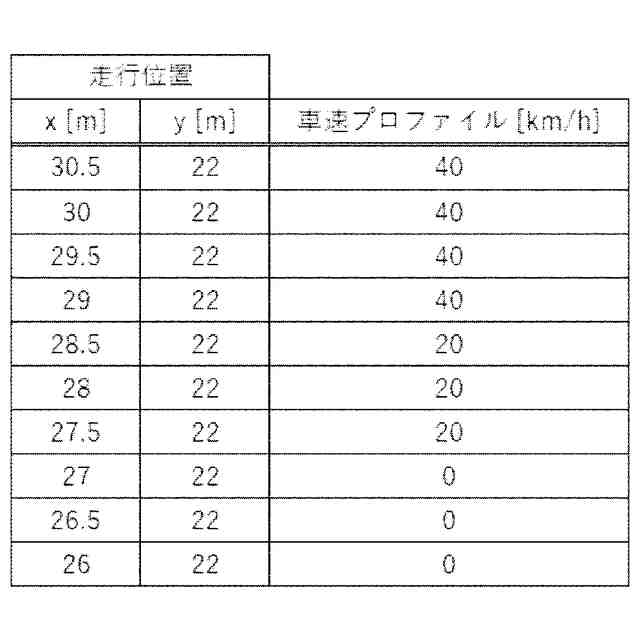
車速プロファイルのデータ管理の一例を示す図である。
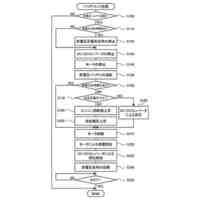
指示情報を送信する機能に関して管理サーバが実行する処理の処理フローを示すフローチャートである。
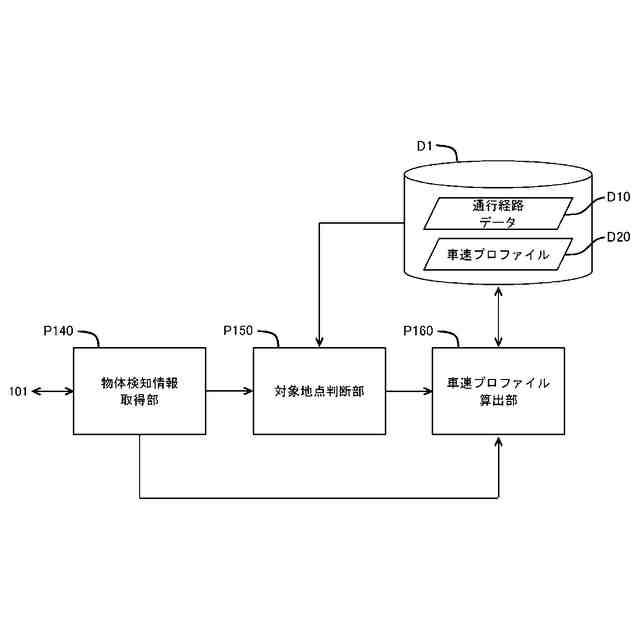
車速プロファイルを算出する機能に関連する管理サーバの機能構成の一例を示すブロック図である。
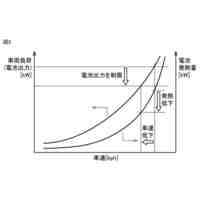
車速プロファイル算出部によって算出される車速プロファイルの一例を示す図である。
車速プロファイルを算出する機能に関して管理サーバが実行する処理の処理フローを示すフローチャートである。
通行経路データの動的な更新に関連する管理サーバの機能構成の一例を示すブロック図である。
通行経路更新部によって更新される通行経路データの一例を示す図である。
通行経路データの動的な更新に関して管理サーバが実行する処理の処理フローを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
膜体
15日前
トヨタ自動車株式会社
減圧弁
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
光電極
今日
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
自動車
7日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
評価方法
15日前
トヨタ自動車株式会社
診断装置
6日前
トヨタ自動車株式会社
車両構造
12日前
トヨタ自動車株式会社
接続構造
5日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
ステータ
7日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
コネクタ
15日前
トヨタ自動車株式会社
充電設備
15日前
トヨタ自動車株式会社
熱交換器
2日前
トヨタ自動車株式会社
記録装置
6日前
トヨタ自動車株式会社
評価装置
5日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
電子装置
今日
トヨタ自動車株式会社
電動車両
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ