TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107466
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025081172,2022162256
出願日
2025-05-14,2022-10-07
発明の名称
移動体支援システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06T
7/00 20170101AFI20250710BHJP(計算;計数)
要約
【課題】インフラカメラの位置ずれを精度よく検出することができる技術を提供すること。
【解決手段】本開示は、1以上のマーカが配置された所定エリアにおける移動体の移動を支援する移動体支援システムに関する。移動体支援システムは、所定エリアに設置されたカメラによって撮像される画像を取得する。カメラは、異なる位置から同じマーカを撮像する第1のカメラと第2のカメラとを含む。移動体支援システムは、第1のカメラから今回取得された第1画像と前回取得された第1画像とを比較して、上記同じマーカの位置の変化を検出し、第2のカメラから今回取得された第2画像と前回取得された第2画像とを比較して、上記同じマーカの位置の変化を検出し、第1画像から上記同じマーカの位置の変化が検出され、かつ、第2画像から上記同じマーカの位置の変化が検出されない場合は、第1のカメラが位置ずれしたと判定する。上記カメラはインフラカメラである。
【選択図】図6
特許請求の範囲
【請求項1】
1以上のマーカが配置された所定エリアにおける移動体の移動を支援する移動体支援システムであって、
1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
前記所定エリアに設置されたインフラカメラによって撮像される画像を取得し、
前記インフラカメラは、異なる位置から同じマーカを撮像する第1のインフラカメラと第2のインフラカメラとを含み、
前記第1のインフラカメラから今回取得された第1画像と前回取得された第1画像とを比較して、前記同じマーカの位置の変化を検出し、
前記第2のインフラカメラから今回取得された第2画像と前回取得された第2画像とを比較して、前記同じマーカの位置の変化を検出し、
前記第1画像から前記同じマーカの位置の変化が検出され、かつ、前記第2画像から前記同じマーカの位置の変化が検出されない場合は、前記第1のインフラカメラが位置ずれしたと判定する
移動体支援システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、動物体が存在する動体領域の存在を良好に判定するための画像処理装置を開示している。当該技術によれば、複数のカメラ画像のそれぞれから動体領域が検出され、指定された平面座標系における動体領域に変換される。そして、各動体領域の重なりが検出され、重なりの検出結果に基づいて実空間内での動体領域の存在が判定される。
【先行技術文献】
【特許文献】
【0003】
特開2008-015573号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
インフラカメラが撮像する画像を用いて移動体の位置推定を行う技術が知られている。位置推定の結果は、例えば移動体の制御などに用いることができる。ただし、このとき、カメラの位置がずれると位置推定に誤差が生じ、移動体の制御が正しく行えなくなる可能性がある。そのため、カメラが位置ずれしている場合には、制御前や制御時に位置ずれを精度よく検出することが求められる。本開示の一つの目的は、インフラカメラの位置ずれを精度よく検出することができる技術を提供することにある。
【課題を解決するための手段】
【0005】
本開示の1つの観点は、1以上のマーカが配置された所定エリアにおける移動体の移動を支援する移動体支援システムに関する。移動体支援システムは、1又は複数のプロセッサを備える。1又は複数のプロセッサは、所定エリアに設置されたカメラによって撮像される画像を取得する。カメラは、異なる位置から同じマーカを撮像する第1のカメラと第2のカメラとを含む。1又は複数のプロセッサは、第1のカメラから今回取得された第1画像と前回取得された第1画像とを比較して、上記同じマーカの位置の変化を検出し、第2のカメラから今回取得された第2画像と前回取得された第2画像とを比較して、上記同じマーカの位置の変化を検出し、第1画像から上記同じマーカの位置の変化が検出され、かつ、第2画像から上記同じマーカの位置の変化が検出されない場合は、第1のカメラが位置ずれしたと判定する。上記カメラはインフラカメラである。
【発明の効果】
【0006】
本開示によれば、インフラカメラの位置ずれを精度よく検出することができる。
【図面の簡単な説明】
【0007】
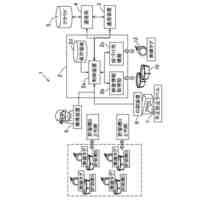
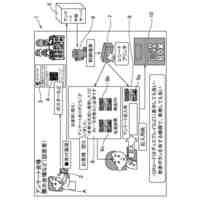
第1の実施の形態の概要を説明するための図である。
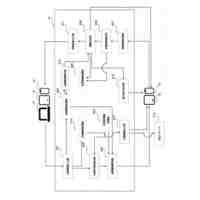
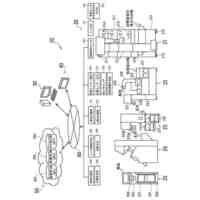
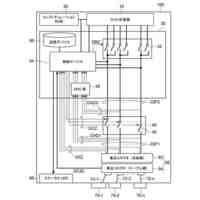
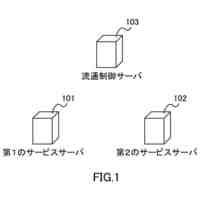
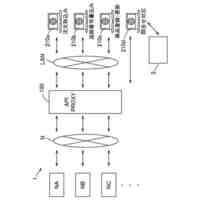
第1の実施の形態に係る移動体支援システムの構成例を示す図である。
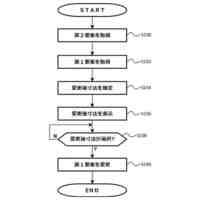
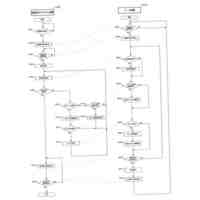
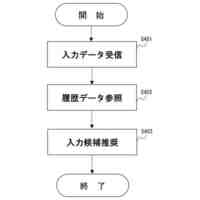
第1の実施の形態に係る処理フロー例を示すフローチャートである。
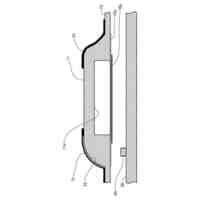
位置変化量を説明するための図である。
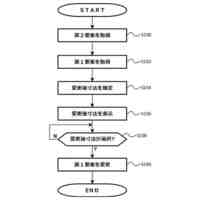
第2の実施の形態に係る処理フロー例を示すフローチャートである。
第3の実施の形態の概要を説明するための図である。
【発明を実施するための形態】
【0008】
添付図面を参照して、本開示の実施の形態を説明する。
【0009】
1.概要
マーカが配置された所定エリアにおいて移動体の制御を行う制御装置について考える。所定エリアとしては駐車場が例示される。駐車場はAVP駐車場であってもよい。移動体としては車両やロボットが例示される。一例として、以下の説明においては、移動体が車両である場合について考える。
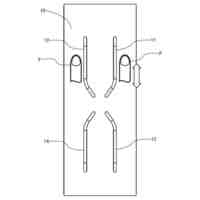
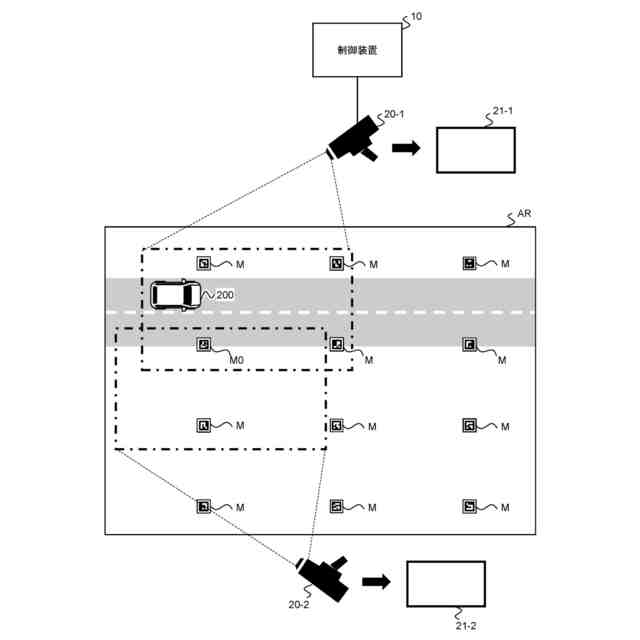
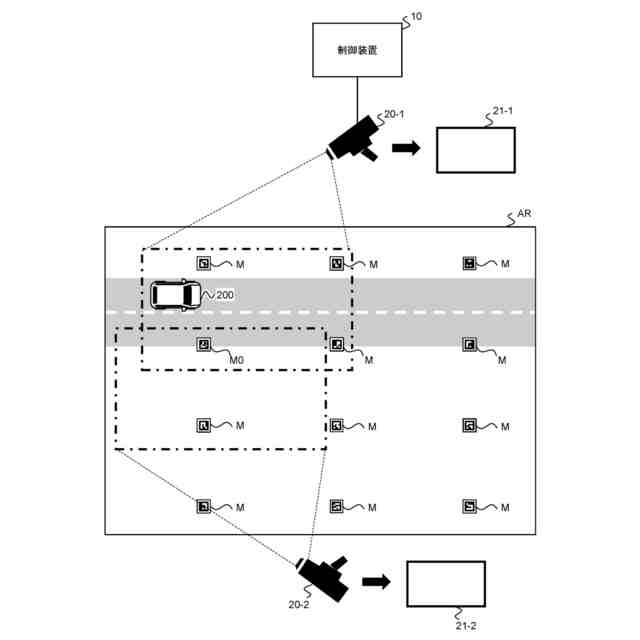
【0010】
図1には、所定エリアARの例が示されている。所定エリアARにはマーカMが配置されている。マーカMは所定エリアAR内の位置についての情報を有する目印である。カメラ20は、インフラに設置されるインフラカメラであり、マーカMを含むように所定エリアAR内の画像を撮像する。図1には、カメラ20が撮像する範囲が一点鎖線で示されている。制御装置は、カメラ20が撮像する画像21を取得し、少なくとも画像21に基づいて車両200の位置推定を行う。また、制御装置10は、推定した車両200の位置に基づいて、所定エリアAR内における車両200の移動の制御を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
裁判のAI化
25日前
個人
フラワーコートA
4日前
個人
情報処理システム
1か月前
個人
検査システム
1か月前
個人
記入設定プラグイン
1か月前
個人
介護情報提供システム
11日前
個人
設計支援システム
17日前
個人
設計支援システム
17日前
個人
不動産売買システム
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
キヤノン電子株式会社
携帯装置
1か月前
株式会社カクシン
支援装置
20日前
個人
備蓄品の管理方法
1か月前
個人
アンケート支援システム
6日前
キヤノン株式会社
情報処理装置
1か月前
サクサ株式会社
中継装置
7日前
個人
ジェスチャーパッドのガイド部材
10日前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社BONNOU
管理装置
1か月前
株式会社東芝
電子機器
1か月前
東洋電装株式会社
操作装置
1か月前
キヤノン電子株式会社
名刺管理システム
1か月前
株式会社アジラ
移動方向推定装置
5日前
東洋電装株式会社
操作装置
1か月前
株式会社ワコム
電子消去具
1か月前
アスエネ株式会社
排水量管理方法
1か月前
株式会社寺岡精工
システム
10日前
ホシデン株式会社
タッチ入力装置
1か月前
個人
リテールレボリューションAIタグ
3日前
日本電気株式会社
システム及び方法
19日前
株式会社JVCケンウッド
管理装置
1か月前
株式会社ライト
情報処理装置
1か月前
個人
パターン抽出方法及び通信多重化方法
1か月前
株式会社アザース
企業連携システム
11日前
株式会社リ・パワー
電力入札システム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ