TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105659
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025067938,2023531433
出願日
2025-04-17,2022-03-24
発明の名称
農業機械の制御システムおよび農業管理システム
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250703BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動運転を行う農業機械による農作業をより効率的に行う。
【解決手段】制御システムは、自動運転を行う農業機械を制御するシステムである。前記制御システムは、前記農業機械が実行する農作業のスケジュールを記憶する記憶装置と、前記スケジュールに従って前記農業機械の動作を制御する制御装置と、を備える。前記制御装置は、前記スケジュールに含まれる特定の農作業が終了した後、前記スケジュールに含まれる次の農作業に基づいて、予め設定された前記農業機械の保管場所とは異なる待機場所に前記農業機械を移動させる。
【選択図】図13
特許請求の範囲
【請求項1】
自動運転を行う農業機械の制御システムであって、
前記農業機械が実行する農作業のスケジュールを記憶する記憶装置と、
前記スケジュールに従って前記農業機械の動作を制御する制御装置と、
を備え、
前記制御装置は、前記スケジュールに含まれる特定の農作業が終了した後、前記スケジュールに含まれる次の農作業に基づいて、予め設定された前記農業機械の保管場所とは異なる待機場所に前記農業機械を移動させる、
制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記制御装置は、前記保管場所と、前記特定の農作業が行われた圃場と、前記次の農作業が行われる圃場と、前記待機場所との位置関係に基づいて、前記待機場所に前記農業機械を移動させる、請求項1に記載の制御システム。
【請求項3】
前記制御装置は、前記特定の農作業が行われた圃場から前記保管場所を経て前記次の農作業が行われる圃場まで移動する場合の第1移動距離よりも、前記特定の農作業が行われた圃場から前記待機場所を経て前記次の農作業が行われる圃場まで移動する場合の第2移動距離が短い場合に、前記農業機械を前記待機場所に移動させる、請求項1または2に記載の制御システム。
【請求項4】
前記制御装置は、前記第2移動距離が前記第1移動距離よりも長い場合に、前記農業機械を前記保管場所に移動させる、請求項3に記載の制御システム。
【請求項5】
前記制御装置は、前記特定の農作業が終了した後時点から、前記次の農作業を開始するまでの時間が所定時間以上である場合に、前記農業機械を前記待機場所に移動させる、請求項1から4のいずれかに記載の制御システム。
【請求項6】
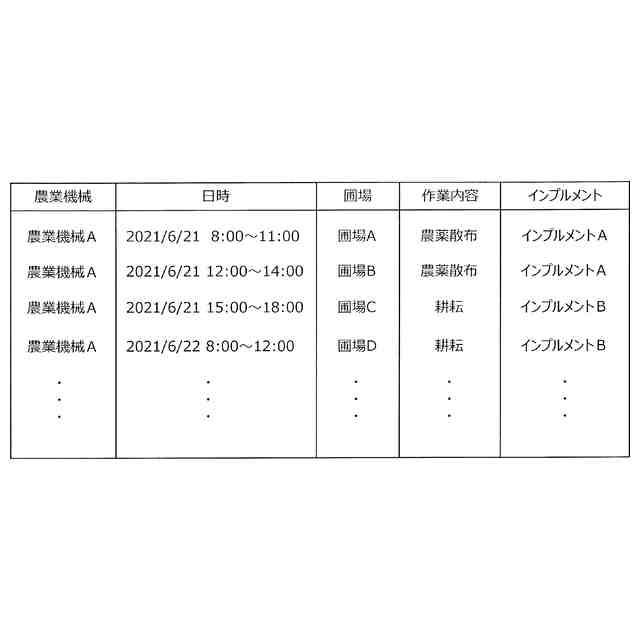
前記記憶装置は、複数の作業日にわたって前記農業機械が実行する複数の農作業であって、前記特定の農作業として各作業日において最後に行われる農作業と、前記次の農作業として各作業日において最初に行われる農作業とを含む複数の農作業を記憶する、請求項1から5のいずれかに記載の制御システム。
【請求項7】
前記農業機械のユーザが管理する場所である前記保管場所と、前記複数のユーザが共同で使用する場所である前記待機場所とを、前記制御装置に入力する入力装置をさらに備えている、請求項1から6のいずれかに記載の制御システム。
【請求項8】
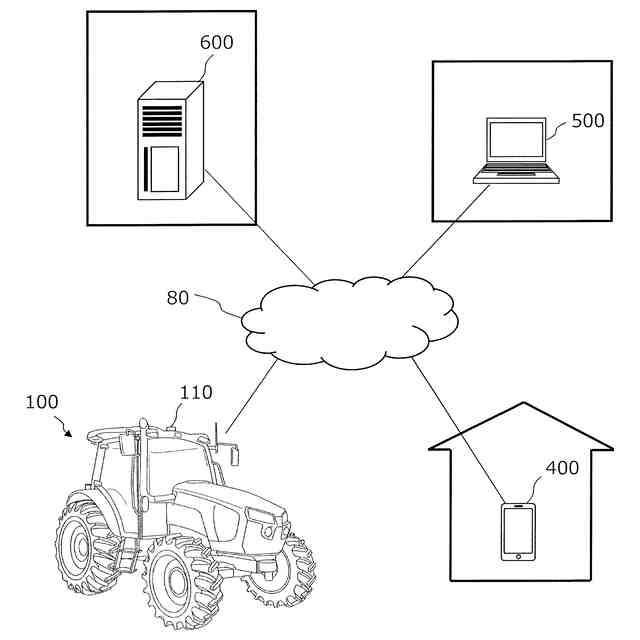
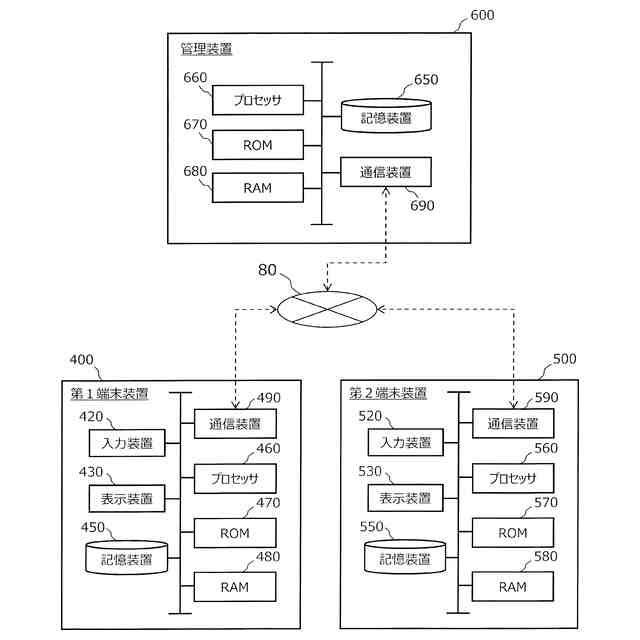
農作業のスケジュールの管理を行う管理装置と、
自動運転を制御する制御装置と、前記管理装置から前記スケジュールを受信する通信装置と、を含む農業機械と、
を備え、
前記制御装置は、前記通信装置が受信した前記スケジュールに含まれる特定の農作業が終了した後、前記スケジュールに含まれる次の農作業に基づいて、予め設定された前記農業機械の保管場所とは異なる待機場所に前記農業機械を移動させる、
農業管理システム。
【請求項9】
前記通信装置は、前記スケジュールとして、前記特定の農作業が行われる圃場を示す情報と、前記次の農作業が行われる圃場を示す情報とを含むスケジュールを受信し、
前記制御装置は、前記保管場所と、前記特定の農作業が行われた圃場と、前記次の農作業が行われる圃場と、前記待機場所との位置関係に基づいて、前記待機場所に前記農業機械を移動させる、
請求項8に記載の農業管理システム。
【請求項10】
前記制御装置は、前記特定の農作業が行われた圃場から前記保管場所を経て前記次の農作業が行われる圃場まで移動する場合の第1移動距離よりも、前記特定の農作業が行われた圃場から前記待機場所を経て前記次の農作業が行われる圃場まで移動する場合の第2移動距離が短い場合に、前記農業機械を前記待機場所に移動させる、請求項8または9に記載の農業管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、農業機械の制御システムおよび農業管理システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
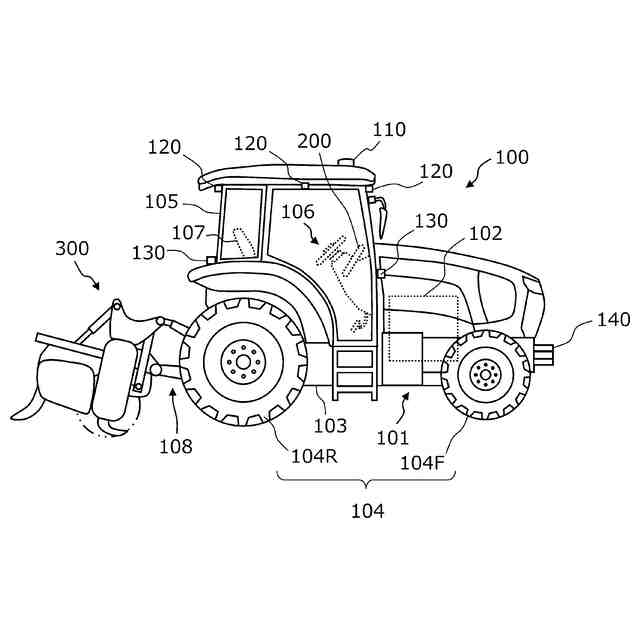
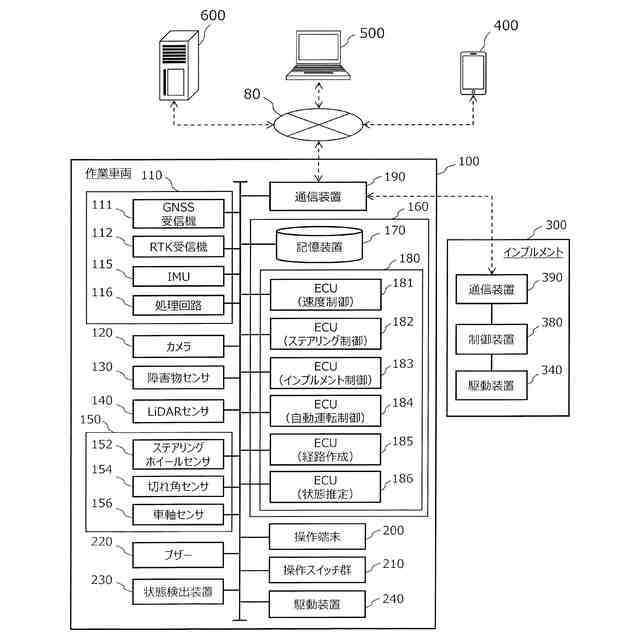
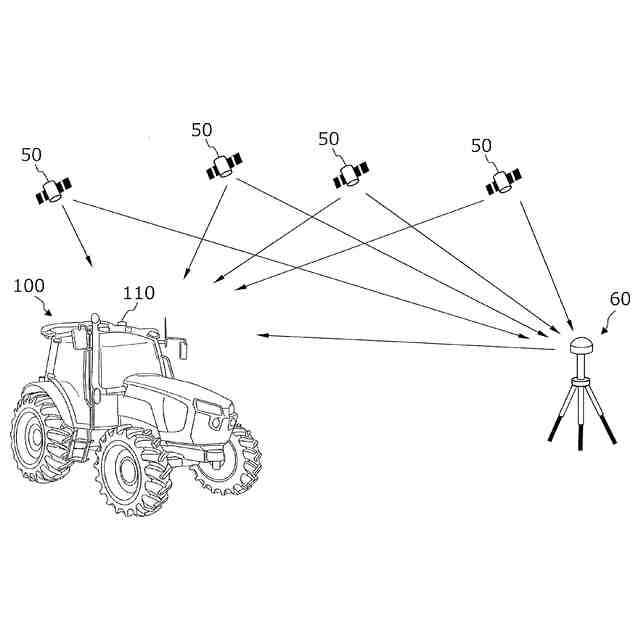
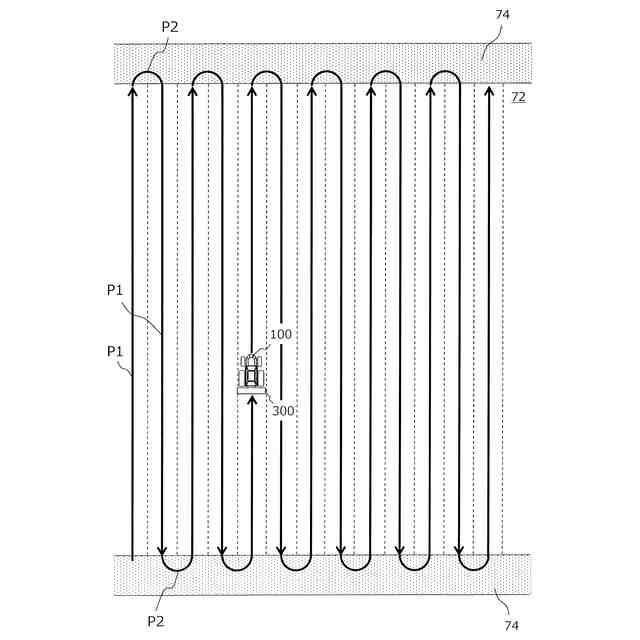
圃場で使用される農業機械の自動化に向けた研究開発が進められている。例えば、GNSS(Global Navigation Satellite System)などの測位システムを利用して圃場内を自動で走行するトラクタ、コンバイン、および田植機などの作業車両が実用化されている。圃場内だけでなく、公道を含む圃場外でも自動で走行する作業車両の研究開発も進められている。
【0003】
特許文献1および2は、道路を挟んで互いに離れた2つの圃場間で無人の作業車両を自動走行させるシステムの例を開示している。
【0004】
特許文献3は、車両の利用者のスケジュールが登録されていない時間帯に、車両の走行に用いられるエネルギーを充填する拠点に車両を自動で移動させる車両制御システムを開示している。
【先行技術文献】
【特許文献】
【0005】
特開2021-073602号公報
特開2021-029218号公報
特開2021-006802号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は、自動運転を行う農業機械による農作業をより効率的に行うための技術を提供する。
【課題を解決するための手段】
【0007】
本明細書は、以下の項目に記載の解決手段を開示している。
【0008】
[項目a1]
農業機械の制御システムであって、
前記農業機械の自動運転を制御する制御装置を備え、
前記制御装置は、農作業のために、前記農業機械に装着されるインプルメントの交換、前記インプルメントのメンテナンス、前記農業機械の部品の交換、前記農業機械の部品のメンテナンス、および資材の補充の少なくとも1つを含む準備作業が必要である場合に、前記農作業の前に、前記準備作業が行われる立ち寄り地に前記農業機械を移動させる、
制御システム。
【0009】
[項目a2]
前記制御装置は、前記インプルメントの装着状態、前記インプルメントの劣化、前記農業機械の部品の劣化、または資材の不足を検出するための1つ以上のセンサから出力された信号に基づいて、前記準備作業が必要であるか否かを決定する、項目a1に記載の制御システム。
【0010】
[項目a3]
前記1つ以上のセンサは、前記インプルメント、前記農業機械の部品、または資材を撮像できるように配置されたイメージセンサ、および前記資材の残量を計測するセンサの少なくとも一方を含む、項目a2に記載の制御システム。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ルアー
9日前
個人
播種装置
6日前
個人
プランターセット
13日前
個人
養殖システム
1日前
個人
生命力近親交配方法
13日前
株式会社シマノ
釣竿
2日前
個人
漁業支援装置及び方法
7日前
ウエダ産業株式会社
切断装置
2日前
個人
落口枡用取付部材及び落口枡
10日前
鹿島建設株式会社
レインガーデン
10日前
OTIS株式会社
ルアー用スカート
6日前
株式会社ササキコーポレーション
農作業機
8日前
株式会社クボタ
水田作業機
13日前
株式会社クボタ
圃場作業機
1日前
株式会社シマノ
ルアー
8日前
株式会社Personal AI
反射光拡散装置
13日前
株式会社タカミヤ
台車用レール構造
7日前
第一精工株式会社
釣り糸の張力付与装置
14日前
株式会社やまぜん
簡易建物及び簡易建物の組立方法
13日前
井関農機株式会社
田植機
9日前
株式会社荏原製作所
養殖装置
1日前
日本製紙クレシア株式会社
ペット用吸収性物品
2日前
三菱マヒンドラ農機株式会社
コンバイン
1日前
株式会社シマノ
ルアー
6日前
丸東東海商事株式会社
蜂用巣箱
2日前
井関農機株式会社
農作業機
15日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
水田除草装置
13日前
花王株式会社
ウイルス不活化剤
13日前
住化エンバイロメンタルサイエンス株式会社
害虫防除用組成物
今日
個人
猫捕獲収容装置
7日前
住友林業株式会社
プランターボックス、及び緑化システム
6日前
ヤンマーホールディングス株式会社
収穫機械
6日前
ヤンマーホールディングス株式会社
収穫機械
6日前
井関農機株式会社
コンバイン
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ