TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104817
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222932
出願日
2023-12-28
発明の名称
作業車両、及び作業車両の制御プログラム
出願人
国立研究開発法人農業・食品産業技術総合研究機構
代理人
個人
主分類
A01B
59/042 20060101AFI20250703BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】低コストで、作業機を連結可能な位置に位置決めすることが可能な作業車両を提供する。
【解決手段】作業機と連結可能な作業車両であって、撮影装置と、前記撮影装置が撮影した画像に基づいて、前記作業車両の駆動を制御する制御装置と、を備え、前記制御装置は、前記作業機を撮影した画像から前記作業機の特徴量を検出し、前記特徴量に基づいて前記作業車両を駆動して、前記撮影装置が前記作業機に設けられた標定用ターゲットを撮影できる所定位置に位置決めし、前記所定位置において、前記作業機に設けられた標定用ターゲットを前記撮影装置を用いて撮影した画像に基づいて、前記作業車両を前記作業機と連結可能な位置まで駆動する。
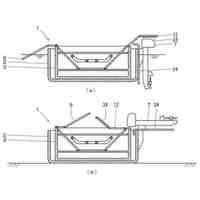
【選択図】図7
特許請求の範囲
【請求項1】
作業機と連結可能な作業車両であって、
撮影装置と、
前記撮影装置が撮影した画像に基づいて、前記作業車両の駆動を制御する制御装置と、を備え、
前記制御装置は、
前記作業機を撮影した画像から前記作業機の特徴量を検出し、
前記特徴量に基づいて前記作業車両を駆動して、前記撮影装置が前記作業機に設けられた標定用ターゲットを撮影できる所定位置に位置決めし、
前記所定位置において、前記作業機に設けられた標定用ターゲットを前記撮影装置を用いて撮影した画像に基づいて、前記作業車両を前記作業機と連結可能な位置まで駆動する、
ことを特徴とする作業車両。
続きを表示(約 760 文字)
【請求項2】
前記制御装置は、
前記作業機を撮影した画像から検出した特徴量と、格納部に格納されている複数種類の作業機それぞれの特徴量のデータとを比較し、比較結果に基づいて、前記撮影装置が撮影した作業機の種類を特定する、ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、特定した作業機の種類が予め定められている作業機の種類でなかった場合に、前記所定位置に位置決めする処理を行わない、ことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記撮影装置は、単眼の撮影装置である、ことを特徴とする請求項1に記載の作業車両。
【請求項5】
前記制御装置は、
前記標定用ターゲットを前記撮影装置を用いて撮影した画像に基づいて、前記作業機の識別情報を読み出し、
前記作業機の識別情報が予め定められている作業機の識別情報と一致しなかった場合に、前記作業車両を前記作業機と連結可能な位置まで駆動する処理を行わない、ことを特徴とする請求項1~4のいずれか一項に記載の作業車両。
【請求項6】
作業機と連結可能な作業車両の制御プログラムであって、
前記作業機を撮影装置を用いて撮影した画像から前記作業機の特徴量を検出し、
前記特徴量に基づいて前記作業車両を駆動して、前記作業機に設けられた標定用ターゲットを前記撮影装置を用いて撮影できる所定位置に位置決めし、
前記所定位置において、前記作業機に設けられた標定用ターゲットを前記撮影装置を用いて撮影した画像に基づいて、前記作業車両を前記作業機と連結可能な位置まで駆動する、
処理をコンピュータに実行させることを特徴とする作業車両の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両、及び作業車両の制御プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
トラクタなどの作業車両に牽引され、あるいは作業車両に装着されて各種の作業を行う作業機が知られている。作業機は、多くの種類がある。一例として、施肥、耕耘、農薬散布、種まき等を行う作業機が挙げられる。
【0003】
作業機は、農作業の内容に応じて選択され、作業車両に装着される。その際、作業車両と作業機の連結作業が必要となる。この連結作業は煩雑であり、またその作業時における事故の発生が懸念される。この問題に対応する技術として、特許文献1の技術が知られている。特許文献1には、トラクタと作業機の連結をより簡便にする連結部材について記載されている。
【先行技術文献】
【特許文献】
【0004】
KR102062994号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業車両に計測機器を搭載し、作業車両と作業機の位置関係や姿勢の関係を計測した結果に基づき作業車両を自動的に制御することで、作業車両に作業機を連結する方法が考えられる。ここで、実用性を考慮すると、高価な計測機器の利用は得策でない。
【0006】
本発明は、かかる事情の下でなされたものであり、低コストで、作業機を連結可能な位置に位置決めすることが可能な作業車両、及び作業車両の制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の作業車両は、作業機と連結可能な作業車両であって、撮影装置と、前記撮影装置が撮影した画像に基づいて、前記作業車両の駆動を制御する制御装置と、を備え、前記制御装置は、前記作業機を撮影した画像から前記作業機の特徴量を検出し、前記特徴量に基づいて前記作業車両を駆動して、前記撮影装置が前記作業機に設けられた標定用ターゲットを撮影できる所定位置に位置決めし、前記所定位置において、前記作業機に設けられた標定用ターゲットを前記撮影装置を用いて撮影した画像に基づいて、前記作業車両を前記作業機と連結可能な位置まで駆動する、
作業車両である。
【発明の効果】
【0008】
本発明の作業車両、及び作業車両の制御プログラムは、低コストで、作業機を連結可能な位置に位置決めすることができるという効果を奏する。
【図面の簡単な説明】
【0009】
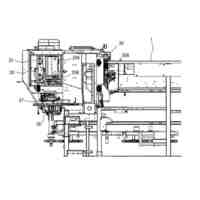
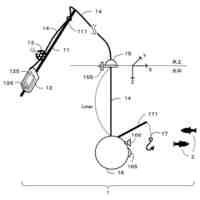
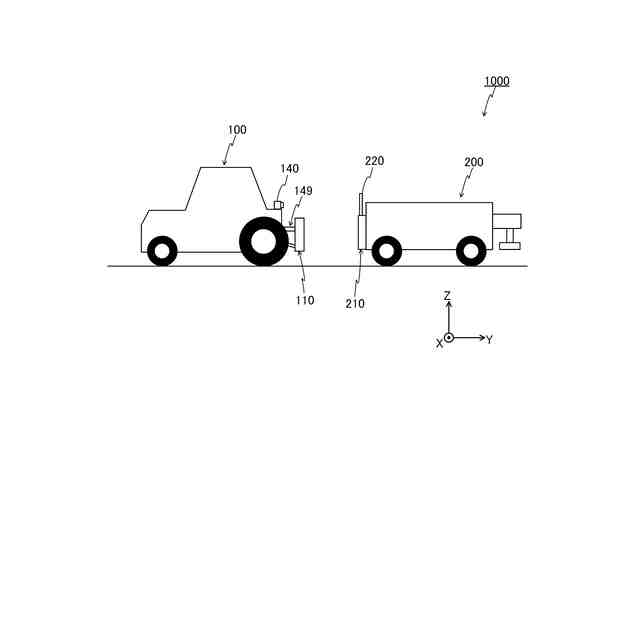
図1は、一実施形態の作業車両システムの構成を示す図である。
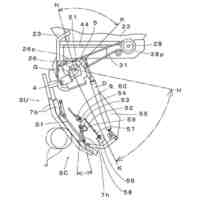
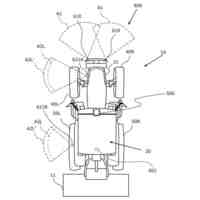
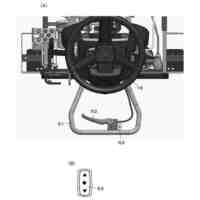
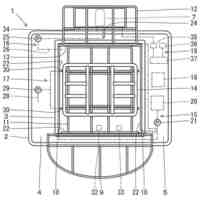
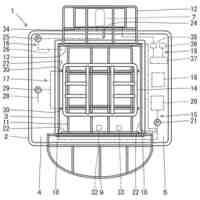
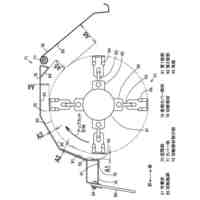
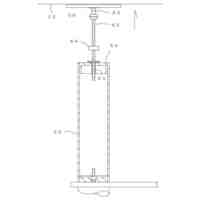
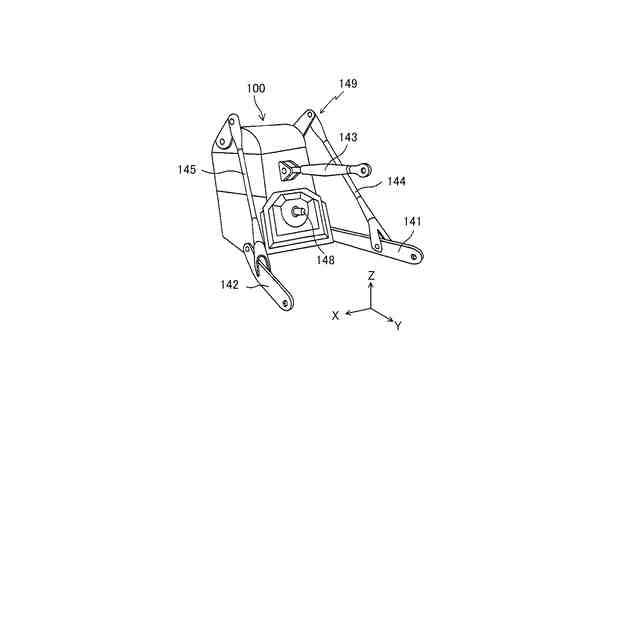
図2は、トラクタの後部を斜視図にて示す図である。
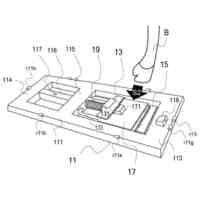
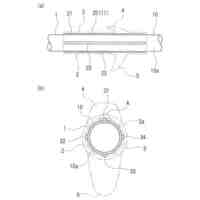
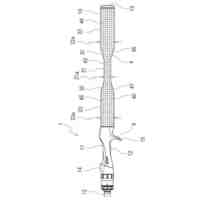
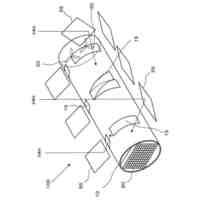
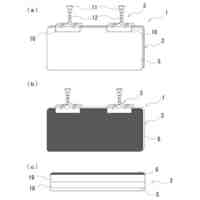
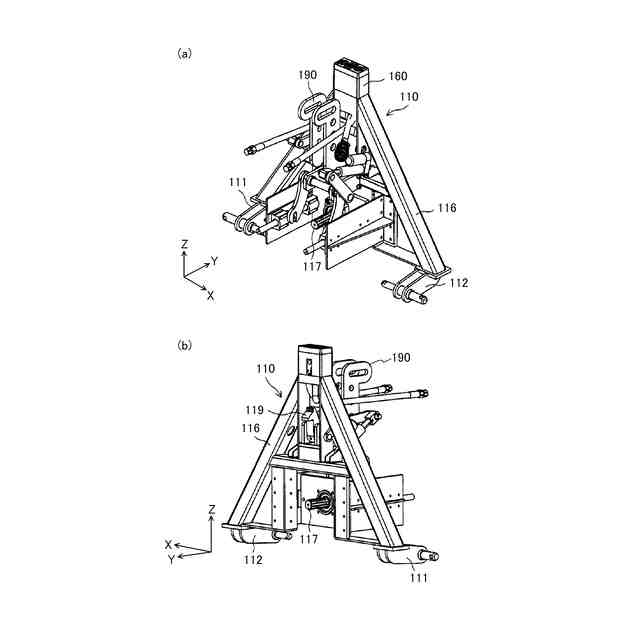
図3(a)は、トラクタ側ヒッチフレームを-Y側(トラクタに取り付けられる側)から見た状態を示す斜視図であり、図3(b)は、トラクタ側ヒッチフレームを+Y側(作業機が連結する側)から見た状態を示す斜視図である。
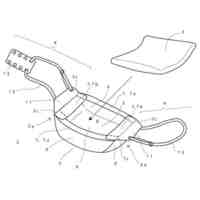
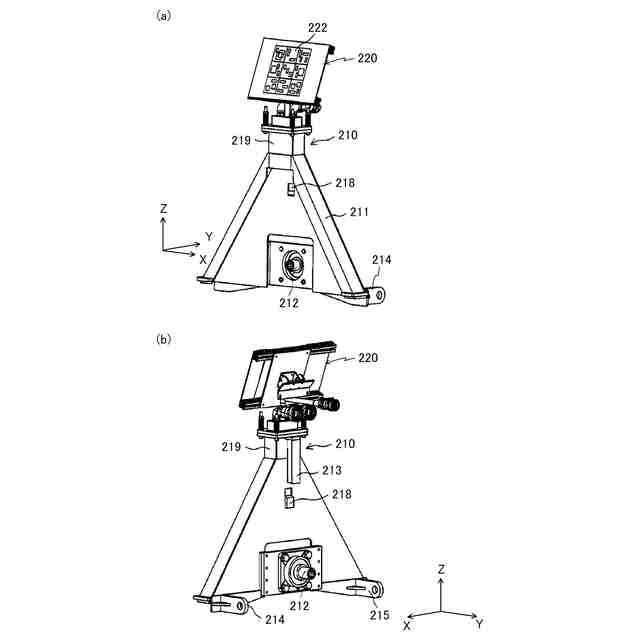
図4(a)は、作業機側ヒッチフレームを-Y側(トラクタ側ヒッチフレームに取り付けられる側)から見た状態を示す斜視図であり、図4(b)は、作業機側ヒッチフレームを+Y側(作業機側)から見た状態を示す斜視図である。
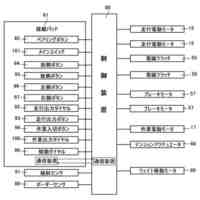
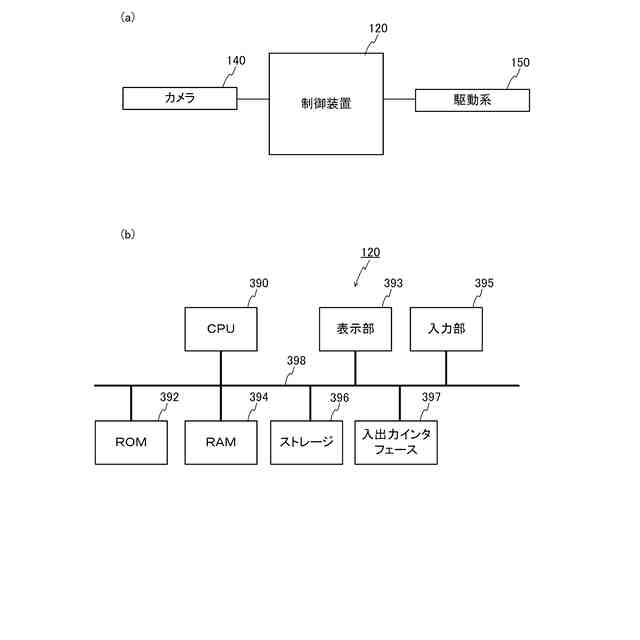
図5(a)は、トラクタの制御系を示すブロック図であり、図5(b)は、制御装置のハードウェア構成を概略的に示す図である。
図6(a)は、制御装置の機能ブロック図であり、図6(b)は、作業機DBの一例を示す図である。
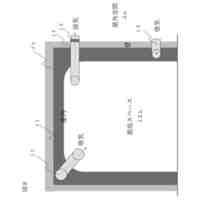
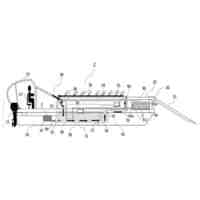
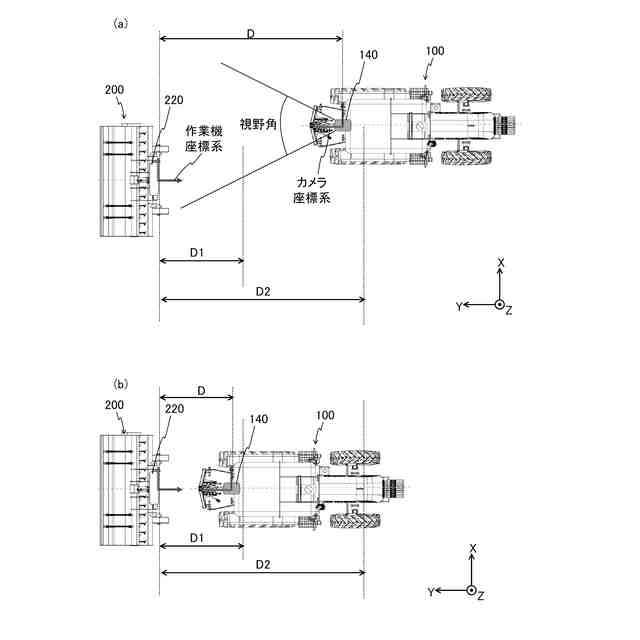
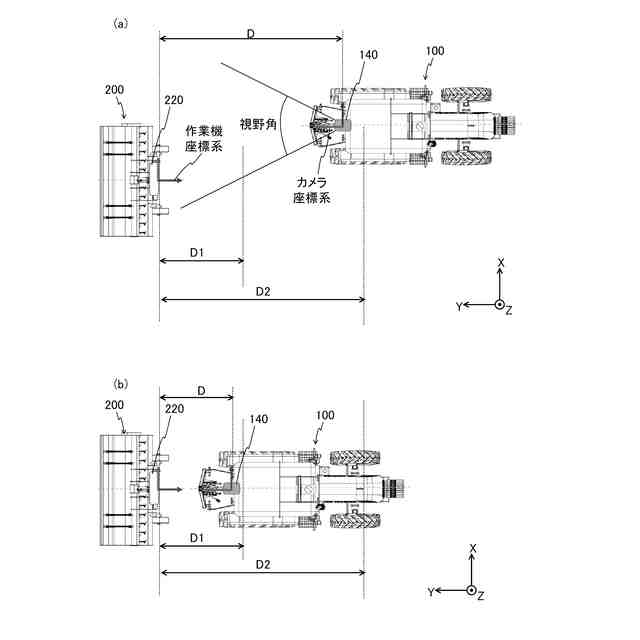
図7(a)は、トラクタと作業機の距離Dが、D1<D≦D2である場合を示す図であり、図7(b)は、トラクタと作業機の距離Dが、D≦D1である場合を示す図である。
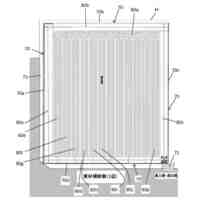
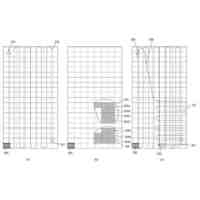
図8は、作業機を撮影した画像から特徴量を検出した結果の一例を示す図である。
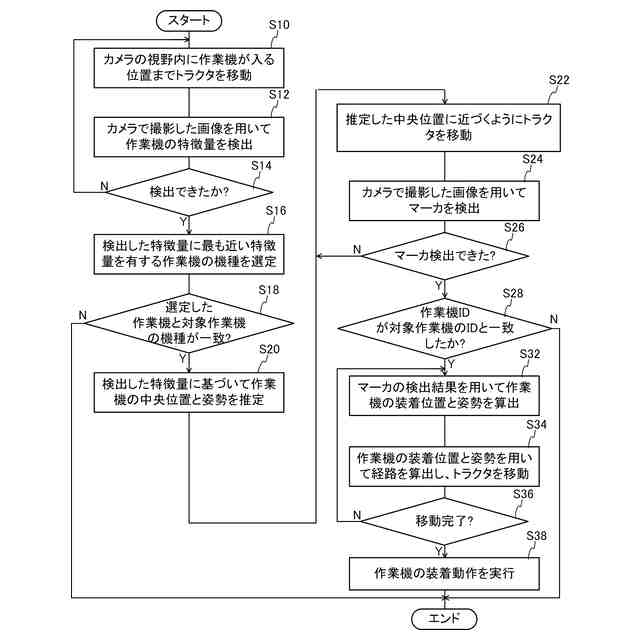
図9は、制御装置の処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本実施形態に係る作業車両システム1000について、図1~図9に基づいて詳細に説明する。図1は、本実施形態の作業車両システム1000を概略的に示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
24日前
個人
釣り用ルアー
24日前
個人
播種機
1か月前
個人
プランターセット
1日前
個人
生命力近親交配方法
1日前
個人
獣捕獲罠装置
4日前
株式会社アテックス
草刈機
9日前
株式会社シマノ
釣竿
8日前
個人
ペット用オムツカバー
8日前
井関農機株式会社
作業車両
25日前
個人
室内栽培システム
1か月前
株式会社シマノ
釣り具
1か月前
井関農機株式会社
圃場作業機
26日前
有限会社マイク
囲い罠
1か月前
井関農機株式会社
コンバイン
1か月前
個人
植物栽培装置
10日前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
歩行型管理機
24日前
株式会社シマノ
釣竿
25日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイイチ
海苔網の酸処理船
1か月前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社村岡水産
釣り用ワーム
24日前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社フルトン
水中捕捉装置
9日前
松山株式会社
草刈作業機
23日前
株式会社パクマケ
植栽用遮光板
16日前
個人
害虫捕獲、解放及び駆除装置
4日前
株式会社泰
愛玩動物用タワー家具
11日前
松山株式会社
スタンド装置
1か月前
花王株式会社
抗菌剤組成物
23日前
井関農機株式会社
水田引水管理システム
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ