TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025104466
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222292
出願日
2023-12-28
発明の名称
自律走行型のロボット掃除機
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
弁理士法人前田特許事務所
主分類
G05D
1/242 20240101AFI20250703BHJP(制御;調整)
要約
【課題】段差の乗り越えおよび段差降下のいずれにも対応可能なロボット掃除機を提供する。
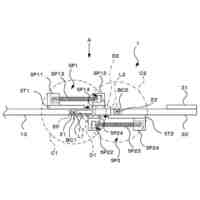
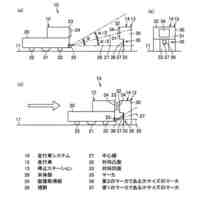
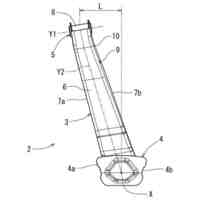
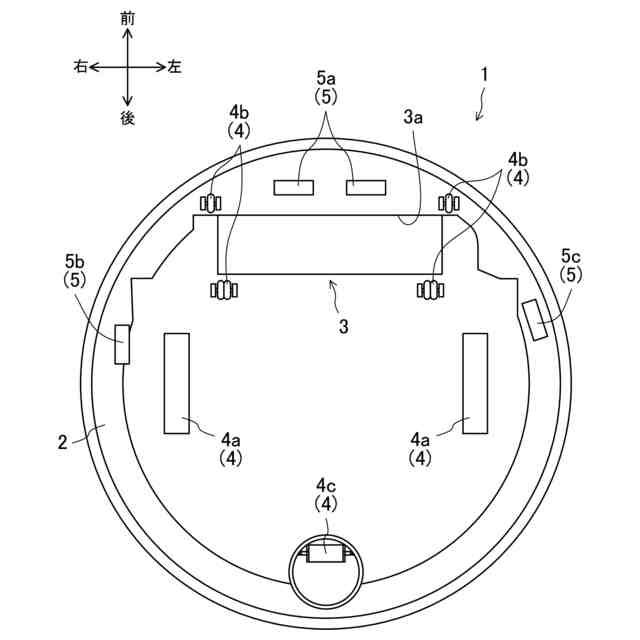
【解決手段】走行手段4により床の上を走行するロボット本体2と、ロボット本体2の進行方向の床からの光の反射強度を計測する反射強度計測手段と、ロボット本体2の姿勢を計測する姿勢計測手段と、判定手段8を備える。判定手段8は、反射強度計測手段による計測値の一定期間の第1時系列データおよび姿勢検出手段による計測値の一定期間の第2時系列データを用いて、進行方向の床が進行可能な高低差かを推定し、進行の可否を判定する。
【選択図】図4
特許請求の範囲
【請求項1】
自律走行型のロボット掃除機であって、
走行手段により進行方向に床の上を走行するロボット本体と、
前記進行方向の床からの光の反射強度を計測する反射強度計測手段と、
前記ロボット本体の姿勢を計測する姿勢計測手段と、
反射強度計測手段による計測値の一定期間の時系列データである第1時系列データおよび前記姿勢計測手段による計測値の一定期間の時系列データである第2時系列データを用いて、前記進行方向の床が進行可能な高低差かを推定し、進行の可否を判定する判定手段を備える、
ことを特徴とするロボット掃除機。
続きを表示(約 660 文字)
【請求項2】
請求項1に記載のロボット掃除機において、
前記ロボット掃除機の走行速度を計測する速度計測手段ないし前記ロボット本体の慣性を計測する慣性計測手段を備え、
前記判定手段は、前記速度計測手段による計測値の一定期間の時系列データである第3時系列データないし前記慣性計測手段による計測値の一定期間の時系列データである第4時系列データを、前記進行方向の床が進行可能な高低差かの推定に用いる、
ことを特徴とするロボット掃除機。
【請求項3】
請求項1に記載のロボット掃除機において、
前記走行手段は、モータによって駆動される駆動輪と、前記駆動輪よりも進行方向後側に回転可能に設けられた従動輪とを備え、
前記反射強度計測手段は、前記駆動輪よりも進行方向側に設けられた光反射強度センサを備える、
ことを特徴とするロボット掃除機。
【請求項4】
請求項1に記載のロボット掃除機において、
前記反射強度計測手段は、前記進行方向の位置をずらして配置された複数の光反射強度センサを備える、
ことを特徴とするロボット掃除機。
【請求項5】
請求項1から請求項4のいずれか1項に記載されたロボット掃除機において、
前記判定手段は、前記第1時系列データおよび前記第2時系列データを用いて、前記進行方向の床が進行可能な高低差かを推定する学習済み機械学習モデルを備える、
ことを特徴とするロボット掃除機。
発明の詳細な説明
【技術分野】
【0001】
開示する技術は、一般家庭向けの自律走行型のロボット掃除機に関し、特に段差を検知する技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、障害物を回避しながら走行し、床面を自動的に掃除するロボット(自律走行型のロボット掃除機、以下単に「ロボット掃除機」という)が注目されている。コンピュータ技術の進歩により、ロボット掃除機は、家具、家電製品、インテリアなどの室内に常備されている障害物について、比較的高い精度で検知でき、これらを回避して床面を走行できるようになってきている。
【0003】
例えば、特許文献1には、段差センサにより検知したクリアランスと傾斜検出手段により検出した傾斜量とに基づいて、床面の段差の乗り越えの可否を判断するように構成されたロボット掃除機が開示されている。すなわち、特許文献1では、本体ケース前のケース下のクリアランスと、進行方向の傾斜量を計測し、計測したクリアランスに傾き量を反映させて、段差乗り越えの可否を判断している。
【先行技術文献】
【特許文献】
【0004】
特許第61893636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術では、本体ケース下面において、幅方向中央の前後にそれぞれ設けられた光学センサを用いて段差センサおよび傾斜検出手段を構成している。具体的には、前側のセンサによりクリアランス(ケース本体の下面と床面との距離)を測定し、前後のセンサそれぞれの検出値とそれらの変化量に基づいて、前後の傾斜を計測するように構成されている。
【0006】
一般的に、クリアランスなどの距離をある程度の精度で測定しようとすると、例えば、PSD(Position Sensitive Detector)等の相対的に高価な位置検出デバイスを用いる必要がある。
【0007】
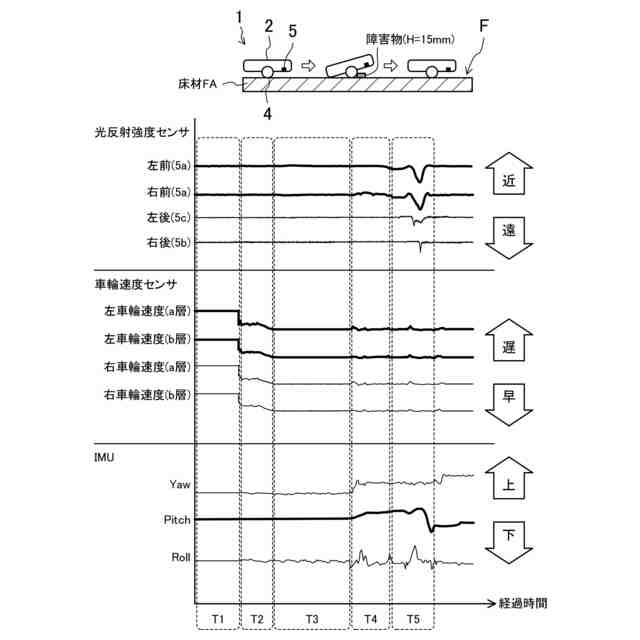
PSDのような位置検出デバイスの他に、光の反射強度を用いて距離を測定する相対的に安価な光反射強度センサが知られている。しかしながら、光反射強度センサを用いた場合、対象となる床面の素材や表面形状の影響を受けやすく、正確な距離の計測が困難であるという問題がある。例えば、ロボット掃除機の進行方向の前後で反射率が異なる床面があるときに、ロボット掃除機が、その境界において、床面に段差があると誤判定するおそれがある。また、床面の反射率が異なりかつ床面より低い段差があるときに、段差の深さを誤判定するおそれがある。
【0008】
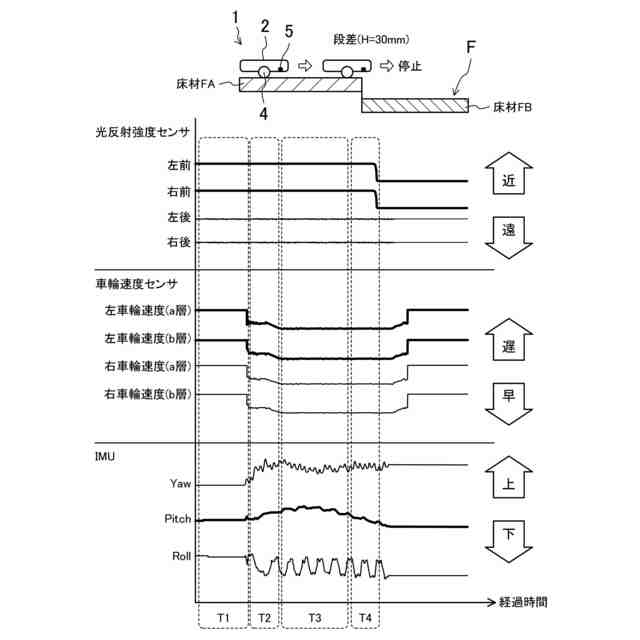
また、別の観点として、一般的なロボット掃除機では、20mm程度の段差を乗り越えることができるように構成されている。一方で、床面に対して所定以上の深さの段差から落下すると、元の高さへの復帰が困難になったり、破損の恐れがあるため、停止または後退するような落下防止機能がはたらくように構成されている。
【0009】
ここで、ロボット掃除機の下面と床面とのクリアランス測定に光反射強度センサを用いた場合、段差を乗り上げる過程において、ロボット掃除機の下面と床面との距離が所定の閾値以上離れていると計測される、すなわち、進行方向に所定以上の深さの段差があると誤判定し、落下防止機能が作動することがある。そうすると、乗り超えることができる段差にもかかわらず、ロボット掃除機が停止または後退するという課題がある。すなわち、ロボット掃除機が、段差の乗り越えの可否または段差の降下の可否について、十分に判定できないという課題がある。
【0010】
そこで、ここに開示する技術は、光反射強度センサを用いた場合においても、段差の乗り越えの可否や段差の降下の可否の判断ができるロボット掃除機を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
21日前
株式会社ダイヘン
移動体
26日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
21日前
三栄ハイテックス株式会社
基準電圧回路
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
6日前
株式会社鷺宮製作所
制御装置
20日前
株式会社オプトン
制御プログラム生成装置
19日前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイヘン
負荷時タップ切換器
26日前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
三菱電機株式会社
電源回路
6日前
シンフォニアテクノロジー株式会社
異常検知装置
19日前
オムロン株式会社
安全装置
19日前
個人
ペダル装置、及びペダル装置を具備する自動車
1日前
株式会社ダイフク
飛行体制御システム
8日前
ローム株式会社
半導体装置
1か月前
株式会社日立製作所
製造工程管理システム
20日前
株式会社大林組
作業機械の自動運転制御システム
1か月前
株式会社豊田自動織機
無人搬送車両
29日前
株式会社東芝
監視制御システム及び監視制御方法
7日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社FUJI
工作機械
22日前
オークラ輸送機株式会社
走行車および自律走行方法
1か月前
横河電機株式会社
プラント運転支援装置
20日前
オークラ輸送機株式会社
走行車および走行車システム
1か月前
花王株式会社
制御方法及び製造装置
1か月前
富士電機株式会社
制御装置、制御方法、及びプログラム
13日前
豊田鉄工株式会社
車両用操作ペダル
1か月前
日清紡マイクロデバイス株式会社
基準電圧回路
22日前
日清紡マイクロデバイス株式会社
基準電圧回路
22日前
日清紡マイクロデバイス株式会社
基準電圧回路
22日前
日清紡マイクロデバイス株式会社
基準電圧回路
20日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ