TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103695
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221264
出願日
2023-12-27
発明の名称
ジャイロセンサおよびジャイロセンサの制御方法
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01C
19/5726 20120101AFI20250702BHJP(測定;試験)
要約
【課題】ジャイロセンサにおいて、振動子の駆動/検出の信号のゲイン影響を低減し、0点バイアス出力を最小化する。
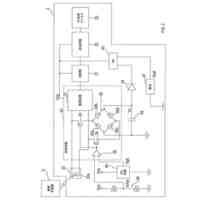
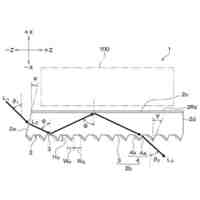
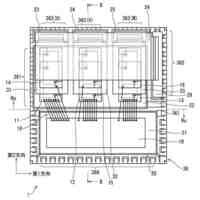
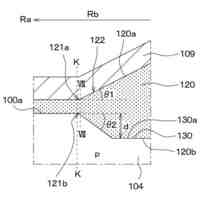
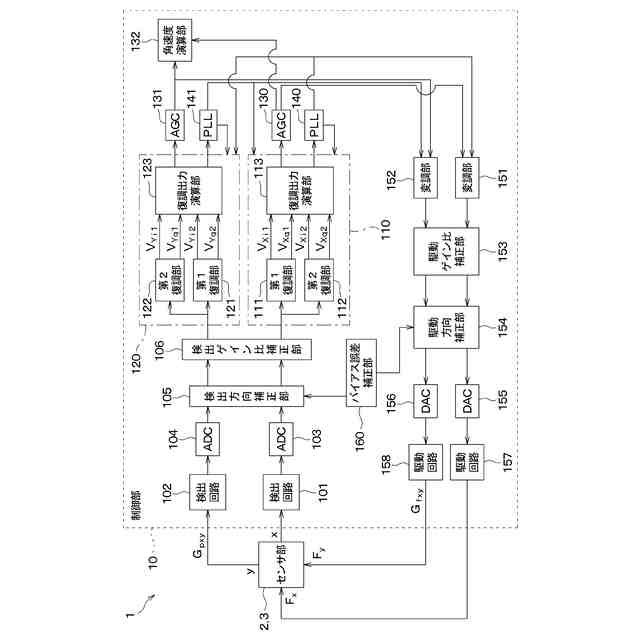
【解決手段】ジャイロセンサは、振動子2と、振動子2と対向する複数の電極を有する実装基板3とによりなるセンサ部が、検出ゲイン比補正部106、駆動ゲイン比補正部153、バイアス誤差補正部160を有する制御部10により駆動制御される。振動子2の2つの振動軸をx軸、y軸として、検出ゲイン比補正部106は、センサ部からのx軸、y軸の振動の検出信号のゲイン比を補正し、駆動ゲイン比補正部153は、センサ部へのx軸、y軸の駆動信号のゲイン比を補正する。バイアス誤差補正部160は、検出ゲイン比、駆動ゲイン比の補正後、角速度演算部132が算出する角速度がゼロに最も近い値となる角度を演算し、当該角度を振動子2の振動の検出/駆動の方向に決定する。
【選択図】図7
特許請求の範囲
【請求項1】
ジャイロセンサであって、
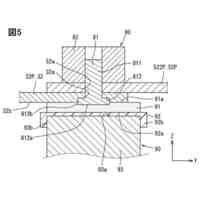
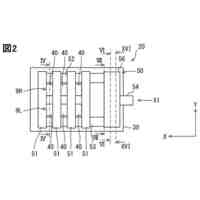
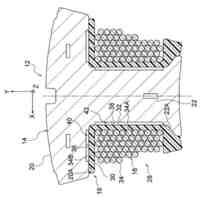
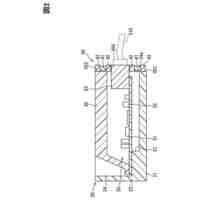
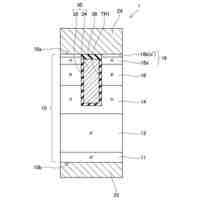
共振角周波数が異なる第一振動モードと第二振動モードとを有する振動子(2)と、
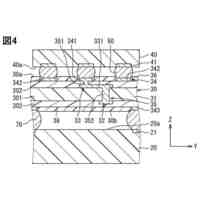
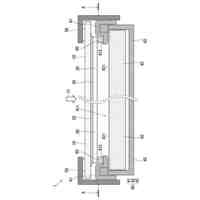
前記振動子と対向する複数の電極(51)を有する実装基板(3)と、
前記振動子の駆動制御を実行する制御部(10)と、を備え、
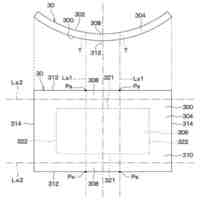
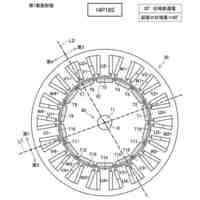
複数の前記電極に囲まれた領域の中心を通り、前記実装基板の厚み方向に沿った仮想直線を軸とする径方向であって、前記第一振動モードの振動方向に沿った方向をx軸とし、前記第二振動モードの振動方向に沿った方向をy軸として、
前記制御部は、
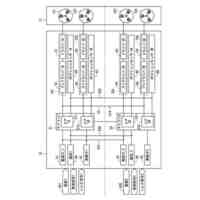
前記振動子を前記第一振動モードで共振駆動させるための第1の駆動信号の周波数制御を実行する第1のPLL(140)と、
前記振動子を前記第二振動モードで共振駆動させるための第2の駆動信号の周波数制御を実行する第2のPLL(141)と、
複数の前記電極のうち前記振動子の前記x軸における振動を検出する第1の検出電極からの第1の検出信号のゲインと、複数の前記電極のうち前記振動子の前記y軸における振動を検出する第2の検出電極からの第2の検出信号のゲインとの比である検出ゲイン比(G
pxy
)の補正を行う検出ゲイン比補正部(106)と、
複数の前記電極のうち前記振動子を前記第一振動モードで振動させるための第1の駆動電極への前記第1の駆動信号のゲインと、複数の前記電極のうち前記振動子を前記第二振動モードで振動させるための第2の駆動電極への前記第2の駆動信号のゲインとの比である駆動ゲイン比(G
fxy
)の補正を行う駆動ゲイン比補正部(153)と、
前記第1の検出信号と前記第1の駆動信号に基づく第1の復調出力(V
Xi1
、V
Xq1
)、および前記第1の検出信号と前記第2の駆動信号に基づく第2の復調出力(V
Xi2
、V
Xq2
)の演算を行う第1復調ブロック(110)と、
前記第2の検出信号と前記第1の駆動信号に基づく第3の復調出力(V
Yi1
、V
Yq1
)、および前記第2の検出信号と前記第2の駆動信号に基づく第4の復調出力(V
Yi2
、V
Yq2
)の演算を行う第2復調ブロック(120)と、
前記第1復調ブロックからの出力信号に基づいて、前記振動子の前記第一振動モードでの共振駆動における振幅を維持するための駆動出力の演算を行う第1のAGC(130)と、
前記第2復調ブロックからの出力信号に基づいて、前記振動子の前記第二振動モードでの共振振動における振幅を維持するための駆動出力の演算を行う第2のAGC(131)と、
外部から印加された角速度の演算を実行する角速度演算部(132)と、
前記検出ゲイン比および前記駆動ゲイン比の補正後に、前記角速度演算部が算出する角速度がゼロに最も近い値となる角度を演算し、当該角度を前記振動子の振動の検出方向および駆動方向として決定するバイアス誤差補正部(160)と、を有するジャイロセンサ。
続きを表示(約 1,000 文字)
【請求項2】
前記検出ゲイン比補正部は、前記検出ゲイン比の逆数である1/G
pxy
を含む行列を乗算し、前記検出ゲイン比を打ち消す行列演算を行う、請求項1に記載のジャイロセンサ。
【請求項3】
前記駆動ゲイン比補正部は、前記駆動ゲイン比の逆数である1/G
fxy
を含む行列を乗算し、前記駆動ゲイン比を打ち消す行列演算を行う、請求項1または2に記載のジャイロセンサ。
【請求項4】
共振角周波数が異なる第一振動モードと第二振動モードとを有する振動子(2)が、前記振動子と対向する複数の電極(51)を有する実装基板(3)に搭載されてなるジャイロセンサの制御方法であって、
2つのPLL(140、141)を用いて、前記振動子を前記第一振動モードおよび前記第二振動モードでの共振駆動を維持することと、
複数の前記電極に囲まれた領域の中心を通り、前記実装基板の厚み方向に沿った仮想直線を軸とする径方向であって、前記第一振動モードの振動方向に沿った方向をx軸とし、前記第二振動モードの振動方向に沿った方向をy軸として、複数の前記電極のうち前記振動子の前記x軸における振動を検出する第1の検出電極からの第1の検出信号のゲインと、複数の前記電極のうち前記振動子の前記y軸における振動を検出する第2の検出電極からの第2の検出信号のゲインとの比である検出ゲイン比(G
pxy
)を演算して決定することと、
複数の前記電極のうち前記振動子を前記x軸で振動させるための第1の駆動電極への第1の駆動信号のゲインと、複数の前記電極のうち前記振動子を前記y軸で振動させるための第2の駆動電極への第2の駆動信号のゲインとの比である駆動ゲイン比(G
fxy
)を演算して決定することと、
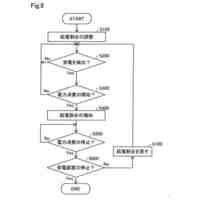
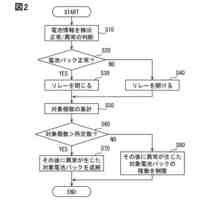
前記検出ゲイン比および前記駆動ゲイン比を決定した後、前記振動子の振動の検出方向および駆動方向を0°~360°の範囲で角度入力してスイープさせつつ、入力した角度ごとに角速度もしくは前記振動子を振動させるための駆動出力を算出し、前記角速度がゼロに最も近い値を指令値(θ
0
)として決定することと、
前記検出方向および前記駆動方向を前記指令値の角度に決定し、角速度の計測を行うことと、を含むジャイロセンサの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ジャイロセンサおよびジャイロセンサの制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、共振角周波数が異なる2つの振動モードを有する振動子と、当該振動子を囲む複数の電極とを有し、電極の一部から振動子に静電気力を印加して共振モードで振動させ、外部から印加される角速度を検出するジャイロセンサが知られている。この種のジャイロセンサは、電極と振動子との間における静電容量に基づき、外部から印加された角速度に応じた信号を出力するが、角速度が印加されていない状態においてもゼロ点誤差による信号出力が存在する。以下、説明の簡便化のため、角速度が印加されていない状態におけるジャイロセンサからの信号出力を「0点バイアス出力」と称する。
【0003】
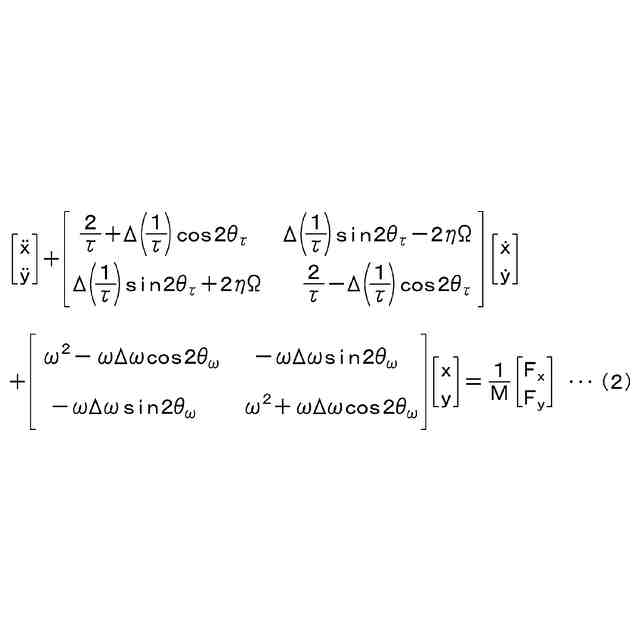
0点バイアス出力の主要因は、振動子の非対称性に由来する成分であり、具体的には振動子の振動軸x、yのQ値の差Δ(1/τ)およびθ
τ
により生じることが知られている。0点バイアス出力は、以下の(1)式で表される。
【0004】
0点バイアス出力=(1/2η)Δ(1/τ)sin2θ
τ
・・・(1)
【0005】
(1)式におけるηとはAngular gainと称される振動子の構造により決まる定数であり、τとは時定数であり、θ
τ
とは振動子のダンパ軸と振動子の駆動および振動の検出を行う電極に沿った電極軸とのなす角度である。
【0006】
0点バイアス出力を低減可能なジャイロセンサとしては、例えば、非特許文献1に記載のものが挙げられる。非特許文献1に記載のジャイロセンサは、0点バイアス出力の成分であるΔ(1/τ)sin2θ
τ
をバイアスとして、バイアスがゼロとなるように、モードを減衰軸上に偏向させるMode Deflectionという方法を採用することで、0点バイアス出力を低減する。
【先行技術文献】
【非特許文献】
【0007】
WANG, Peng, et al. Bias Thermal Stability Improvement of Mode-Matching MEMS Gyroscope Using Mode Deflection. Journal of Microelectromechanical Systems, 2022, 32.1: 1-3.
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上記のモードを減衰軸上に偏向させる、すなわちθ
τ
によるバイアス出力が一番小さい方向でジャイロ動作をさせた場合であっても、0点バイアス出力には残差が生じうる。振動子の駆動信号や振動の検出信号に、振動子の2つの振動軸間においてゲイン比が存在する場合には、0点バイアス出力に残差が生じ、0点バイアス出力を最小化することができない。例えば、振動子への駆動の指令を出した方向と実際の振動子の振動方向とが異なる状態、あるいは振動子の実際の振動角度と電圧値から読み取った振動角度とが異なる状態では、0点バイアス出力に残差が生じてしまう。
【0009】
また、キャリブレーション等によりシステム上において(1)式で表される0点バイアス出力が0になるように数値補正することも考えられる。しかし、動作状態における温度変化や経時変化等の影響によって0点バイアス出力が変動しうるため、このような場合には、キャリブレーション等による0点バイアス出力の低減効果が薄れてしまう。また、この方法であっても、非特許文献1に記載の方法と同様に、検出信号や駆動信号で2つの振動軸間におけるゲイン比が存在する場合には対応することができない。
【0010】
本開示は、上記の点に鑑み、振動子の駆動/検出の信号の2つの振動軸間のゲイン比影響を低減し、0点バイアス出力を最小化することが可能なジャイロセンサおよびその制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
携帯機
2か月前
株式会社デンソーエレクトロニクス
発音器
23日前
株式会社デンソー
受電装置
29日前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
ステータ
15日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
23日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電気装置
1か月前
株式会社デンソー
受電装置
15日前
株式会社デンソー
検出装置
28日前
株式会社デンソーウェーブ
決済端末
1か月前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
受電装置
21日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
電子装置
24日前
株式会社デンソー
電子装置
24日前
株式会社デンソー
撮像装置
24日前
株式会社デンソー
熱交換器
24日前
株式会社デンソー
冷却装置
24日前
株式会社デンソー
通信装置
24日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
23日前
株式会社デンソーテン
表示装置
1か月前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
回転電機
1か月前
株式会社デンソー
電源装置
2日前
株式会社デンソー
半導体素子
1か月前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
熱音響装置
16日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
半導体装置
14日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ