TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103694
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221263
出願日
2023-12-27
発明の名称
ジャイロセンサ
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01C
19/5776 20120101AFI20250702BHJP(測定;試験)
要約
【課題】2つの振動モードを有する振動子を備え、モードマッチ制御とは独立して電圧印加時の振動子の振動軸と電極軸とを一致させるフィードバック制御を可能なジャイロセンサとする。
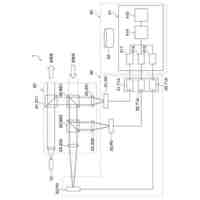
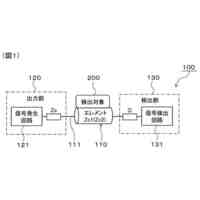
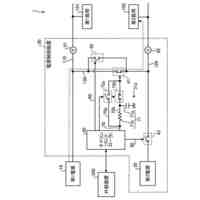
【解決手段】ジャイロセンサ1は、PLL回路110、120を有し、共振周波数ω
1
の第一振動モードの検出電圧V
XP
と第1の駆動信号に基づく復調、共振周波数ω
2
の第二振動モードの検出電圧V
YP
と第2の駆動信号に基づく復調を行う第1復調部113、123を有する。制御部10は、検出電圧V
XP
と第2の駆動信号に基づく復調、検出電圧V
YP
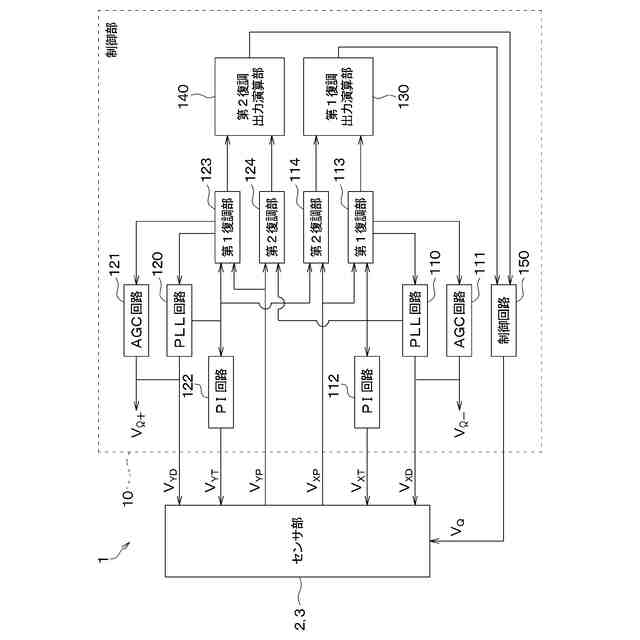
と第1の駆動信号に基づく復調を行う第2復調部114、124を有する。制御部10は、第1、第2復調部の復調出力に基づく演算を行う復調出力演算部130、140を有し、復調出力演算部130、140の演算結果に基づき、電圧印加時の振動子2の振動軸と電極軸とを一致させるフィードバック制御を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
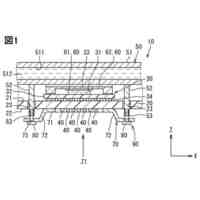
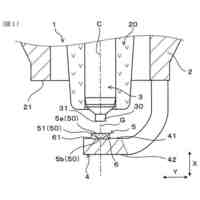
共振周波数が異なる第一振動モードと第二振動モードとを有する振動子(2)と、
前記振動子と対向する複数の電極(51)を有する実装基板(3)と、
前記振動子を前記第一振動モードで振動させるための駆動信号の周波数の制御を行う第1のPLL回路(110)と、
前記振動子を前記第二振動モードで振動させるための駆動信号の周波数の制御を行う第2のPLL回路(120)と、
複数の前記電極に囲まれた領域の中心を通り、前記実装基板の厚み方向に沿った仮想直線を軸とする径方向であって、複数の前記電極のうち前記第一振動モードおよび前記第二振動モードの駆動に用いられる駆動電極に沿った2つの方向を電極軸(X、Y)とし、
前記径方向に沿った方向であって、前記第一振動モードおよび前記第二振動モードの振動方向に沿った2つの方向を振動軸(x、y)として、
複数の前記電極のうち前記第一振動モードの振動を検出する前記電極からの第1の検出電圧(V
XP
)と前記第1のPLL回路から出力される前記第一振動モードを共振駆動する周波数(ω
1
)の第1の駆動信号とに基づいて第1の復調出力(V
Xi1
、V
Xq1
)、および複数の前記電極のうち前記第二振動モードの振動を検出する前記電極からの第2の検出電圧(V
YP
)と前記第2のPLL回路から出力される前記第二振動モードを共振駆動する周波数(ω
2
)の第2の駆動信号とに基づいて、第2の復調出力(V
Yi2
、V
Yq2
)を演算する第1復調部(113、123)と、
前記第1の検出電圧と前記第2の駆動信号とに基づいて第3の復調出力(V
Xi2
、V
Xq2
)、および前記第2の検出電圧と前記第1の駆動信号とに基づいて第4の復調出力(V
Yi1
、V
Yq1
)を演算する第2復調部(114、124)と、
前記第1の復調出力および前記第3の復調出力に基づいて、前記第一振動モードの振幅および位相を演算する第1復調出力演算部(130)と、
前記第2の復調出力および前記第4の復調出力に基づいて、前記第二振動モードの振幅および位相を演算する第2復調出力演算部(140)と、
前記第1復調出力演算部または前記第2復調出力演算部からの前記振幅および前記位相についての入力信号に基づいて、前記振動軸と前記電極軸とを一致させる制御信号(V
Q+
、V
Q-
)を出力する制御回路(150)と、を備えるジャイロセンサ。
続きを表示(約 940 文字)
【請求項2】
前記第1復調出力演算部は、前記第1の復調出力および前記第3の復調出力の一部をカットするハイパスフィルタ(131~134)と、前記ハイパスフィルタを通した後の前記第1の復調出力および前記第3の復調出力を二乗して加算する二乗和の演算をし、前記第一振動モードの振幅を算出する演算部(137、138)と、前記ハイパスフィルタを通した後の前記第1の復調出力および前記第3の復調出力に基づいて前記第一振動モードの位相を演算する位相比較部(135、136)とを有し、
前記第2復調出力演算部は、前記第2の復調出力および前記第4の復調出力の一部をカットするハイパスフィルタ(141~144)と、前記ハイパスフィルタを通した後の前記第2の復調出力および前記第4の復調出力を二乗して加算する二乗和の演算をし、前記第二振動モードの振幅を算出する演算部(147、148)と、前記ハイパスフィルタを通した後の前記第2の復調出力および前記第4の復調出力に基づいて前記第二振動モードの位相を演算する位相比較部(145、146)とを有する、請求項1に記載のジャイロセンサ。
【請求項3】
前記第1の駆動信号と前記第2の駆動信号とに基づいて、前記第一振動モードと前記第二振動モードとの共振周波数の差(Δω)の周波数信号を出力する発振回路(160)をさらに有し、
前記第1復調出力演算部は、前記発振回路からの前記周波数信号を用いて復調処理を行い、前記第一振動モードの振幅および位相を演算する第3復調部(139)を有し、
前記第2復調出力演算部は、前記発振回路からの前記周波数信号を用いて復調処理を行い、前記第二振動モードの振幅および位相を演算する第3復調部(149)を有する、請求項1に記載のジャイロセンサ。
【請求項4】
前記第1復調出力演算部または前記第2復調出力演算部からの前記入力信号に基づいて、前記第一振動モードの共振周波数と前記第二振動モードの共振周波数との差をゼロにするための制御信号(V
XT
、V
YT
)を出力するPI回路(151)をさらに有する、請求項2に記載のジャイロセンサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ジャイロセンサに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、振動型のジャイロセンサにおいて、センサ素子である振動子に励振される2つの振動モードの共振周波数を一致させること、すなわちモードマッチにより、センサの精度向上が可能であることが知られている。振動子は、通常、振動モードを調整する特別な加工を施さない限り、振動軸と電極軸が異なる、または2つの共振周波数ω
1
、ω
2
が異なる。以下、説明の簡便化のため、振動子の第一振動モードの共振周波数を単に「共振周波数ω
1
」と称し、振動子の第二振動モードの共振周波数を単に「共振周波数ω
2
」と称する。また、本明細書では、振動子の2つの共振周波数ω
1
、ω
2
をまとめて「モード周波数ω
1
、ω
2
」と称することがある。
【0003】
そこで、モードマッチは、センサの精度向上のため、静電駆動式の場合、電気バネ効果を利用し、振動モードの状態を電圧印加による静電気力で調整することでモード周波数ω
1
、ω
2
(ω
2
>ω
1
)を一致させる。以下、説明の便宜上、振動子の振動軸と電極軸とのなす角度をθ
ωα
と称し、モード周波数の周波数差をΔω
α
と称し、振動子を駆動する際の電圧印加時における振動軸と電極軸とのなす角度およびモード周波数の差をそれぞれθ
ωβ
、Δω
β
と称する。
【0004】
上記のモードマッチを常時維持するためのジャイロセンサとしては、例えば、特許文献1に記載のものが挙げられる。特許文献1に記載のジャイロセンサは、振動子を第一振動モードで振動させるための駆動信号の周波数制御を行う第1のPLL回路と、振動子を第二振動モードで振動させるための駆動信号の周波数制御を行う第2のPLL回路とを備える。このジャイロセンサは、モードマッチにおいて、振動子の2つの共振周波数ω
1
、ω
2
がそれぞれ基準周波数ω
ref
となるように制御する。なお、PLLとは、Phase Locked Loopの略称であり、位相同期ループとも称される。
【先行技術文献】
【特許文献】
【0005】
中国特許出願公開第115597574号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、2つのPLL回路を有し、モードマッチを常時維持するジャイロセンサが提案されているが、ω
2
-ω
1
=Δω
α
=0およびθ
ωα
=0の2つの条件を満たすには振動モードを調整する特別な加工あるいは周到な電圧印加が事前に必要となる。しかし、特別な加工等がなく、初期状態でΔω
α
≠0かつθ
ωα
≠0のセンサ素子である場合、モードマッチを常時維持するためには、Δω
β
とは独立にθ
ωβ
を制御することが必要となる。
【0007】
本開示は、上記の点に鑑み、初期状態でΔω
α
≠0かつθ
ωα
≠0であっても、Δω
β
の制御とは独立して、振動モードの電圧印加時におけるθ
ωβ
のフィードバック制御が可能なジャイロセンサを提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の1つの観点によれば、ジャイロセンサは、共振周波数が異なる第一振動モードと第二振動モードとを有する振動子(2)と、振動子と対向する複数の電極(51)を有する実装基板(3)と、振動子を第一振動モードで振動させるための駆動信号の周波数の制御を行う第1のPLL回路(110)と、振動子を第二振動モードで振動させるための駆動信号の周波数の制御を行う第2のPLL回路(120)と、複数の電極に囲まれた領域の中心を通り、実装基板の厚み方向に沿った仮想直線を軸とする径方向であって、複数の電極のうち第一振動モードおよび第二振動モードの駆動に用いられる駆動電極に沿った2つの方向を電極軸(X、Y)とし、径方向に沿った方向であって、第一振動モードおよび第二振動モードの振動方向に沿った2つの方向を振動軸(x、y)として、複数の電極のうち第一振動モードの振動を検出する電極からの第1の検出電圧(V
XP
)と第1のPLL回路から出力される第一振動モードを共振駆動する周波数(ω
1
)の第1の駆動信号とに基づいて第1の復調出力(V
Xi1
、V
Xq1
)、および複数の電極のうち第二振動モードの振動を検出する電極からの第2の検出電圧(V
YP
)と第2のPLL回路から出力される第二振動モードを共振駆動する周波数(ω
2
)の第2の駆動信号とに基づいて、第2の復調出力(V
Yi2
、V
Yq2
)を演算する第1復調部(113、123)と、第1の検出電圧と第2の駆動信号とに基づいて第3の復調出力(V
Xi2
、V
Xq2
)、および第2の検出電圧と第1の駆動信号とに基づいて第4の復調出力(V
Yi1
、V
Yq1
)を演算する第2復調部(114、124)と、第1の復調出力および第3の復調出力に基づいて、第一振動モードの振幅および位相を演算する第1復調出力演算部(130)と、第2の復調出力および第4の復調出力に基づいて、第二振動モードの振幅および位相を演算する第2復調出力演算部(140)と、第1復調出力演算部または第2復調出力演算部からの振幅および位相についての入力信号に基づいて、振動軸と電極軸とを一致させる制御信号(V
Q+
、V
Q-
)を出力する制御回路(150)と、を備える。
【0009】
これにより、ジャイロセンサは、2つの独立したPLL回路と、振動子の第一振動モードの第1の検出電圧とその第1の駆動信号とに基づく復調、および振動子の第二振動モードの第2の検出電圧とその第2の駆動信号とに基づく復調を行う第1復調部とを有する。また、ジャイロセンサは、第1の検出電圧と第2の駆動信号とに基づく復調、および第2の検出電圧と第1の駆動信号とに基づく復調を行う第2復調部を有する。さらに、ジャイロセンサは、第1、第2復調部の復調出力に基づいて2つの振動モードの振幅・位相を演算する復調出力演算部と、復調出力演算部からの入力信号に基づいて振動子の振動軸と電極軸とを一致させる制御信号を出力する制御回路とを備える。これにより、ジャイロセンサは、初期状態において、振動子の2つの共振周波数差Δω
α
≠0、かつ振動軸と電極軸とがズレたθ
ωα
≠0であっても、2種の復調部およびその復調出力に基づいてθ
ωβ
=0のフィードバック制御が可能となっている。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
25日前
株式会社デンソーウェーブ
携帯端末
20日前
株式会社デンソー
圧電素子
27日前
株式会社デンソー
電子装置
29日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
ステータ
13日前
株式会社デンソー
電子機器
25日前
株式会社デンソー
測距装置
4日前
株式会社デンソー
電子装置
14日前
株式会社デンソー
電子装置
18日前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
送電装置
14日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
駆動装置
28日前
株式会社デンソー
ステータ
18日前
株式会社デンソー
書込装置
今日
株式会社デンソー
電子装置
今日
株式会社デンソー
駆動装置
28日前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
点火プラグ
13日前
株式会社デンソー
熱音響装置
18日前
株式会社デンソー
半導体装置
21日前
株式会社デンソー
ガスセンサ
今日
株式会社デンソー
半導体装置
14日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソーエレクトロニクス
点灯制御装置
1か月前
株式会社デンソーテン
電源制御装置
21日前
株式会社デンソー
電力変換装置
29日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソー
中継システム
4日前
株式会社デンソー
特性補償回路
26日前
株式会社デンソー
小型電動車両
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ