TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102236
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219562
出願日
2023-12-26
発明の名称
路面状態検出装置および路面状態検出プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/00 20060101AFI20250701BHJP(信号)
要約
【課題】減速帯のような路面凹凸を路面勾配と良好に区別して検出することを可能とする技術を提供すること。
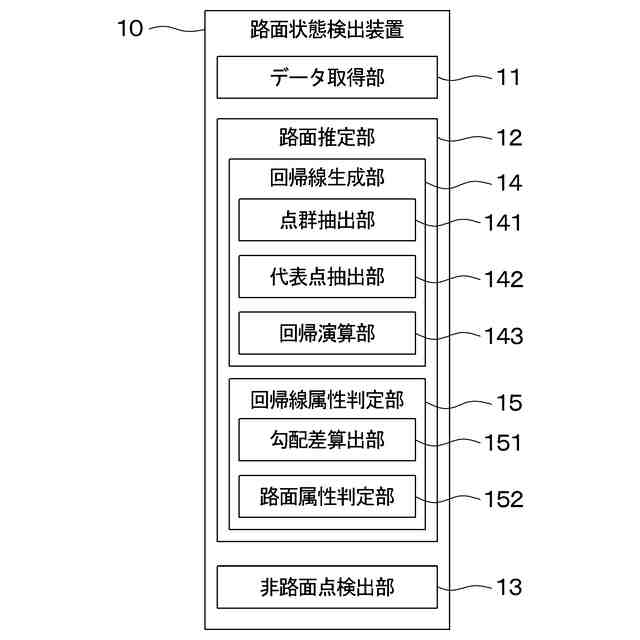
【解決手段】路面状態検出装置(10)は、回帰線生成部(14)と回帰線属性判定部(15)と非路面点検出部(13)とを備える。回帰線生成部は、複数の測距点について奥行方向と高さ方向とによる2次元座標系における回帰線を生成する。回帰線属性判定部は、奥行方向における所定距離内の回帰線の勾配変化に基づいて、回帰線が路面に対応する路面構成線であるか路面に対応しない非路面構成線であるかを判定する。非路面点検出部は、回帰線属性判定部による判定結果と、回帰線と測距点との位置関係とに基づいて、路面を構成しない測距点である非路面点を検出する。
【選択図】図2
特許請求の範囲
【請求項1】
測距センサ(3)により位置情報を検出した測距点(P)に基づいて、前記測距センサを搭載した自車両(V)の進行先の路面状態を検出する、路面状態検出装置(10)であって、
複数の前記測距点について、路面(R)および前記自車両の進行方向に沿った奥行方向と高さ方向とによる2次元座標系における回帰線(L)を生成する、回帰線生成部(14)と、
前記回帰線が前記路面に対応する路面構成線(Lgr)であるか前記路面に対応しない非路面構成線(Lgu)であるかの判定である属性判定を実行する、回帰線属性判定部(15)と、
前記回帰線属性判定部による判定結果と、前記回帰線と前記測距点との位置関係とに基づいて、前記路面を構成しない前記測距点である非路面点(Pu)を検出する、非路面点検出部(13)と、
を備え、
前記回帰線属性判定部は、
前記回帰線の勾配変化を算出する、勾配差算出部(151)と、
前記奥行方向における所定距離内の前記勾配変化に基づいて前記属性判定を実行する、路面属性判定部(152)と、
を備えた、
路面状態検出装置。
続きを表示(約 1,700 文字)
【請求項2】
前記回帰線生成部は、前記奥行方向に並んだ複数の回帰線セグメント(Lg)からなる前記回帰線を生成し、
前記勾配差算出部は、前記奥行方向について隣接する前記回帰線セグメントの間の前記勾配変化を算出する、
請求項1に記載の路面状態検出装置。
【請求項3】
前記回帰線生成部は、線分による前記回帰線セグメントを生成し、
前記勾配差算出部は、前記奥行方向について隣接する前記線分の間の勾配差を算出する、
請求項2に記載の路面状態検出装置。
【請求項4】
前記回帰線生成部は、複数の前記測距点としてのセグメント構成点(Pxx)によって形成された前記回帰線セグメントである注目セグメント(Lg_t)と前記セグメント構成点に追加するか否かの判定対象としての前記測距点である注目測距点(Px_t)から前記注目セグメントにおける前記注目測距点に近接する側の端部に向かう仮想線分(Ldt)との勾配差分、または、前記注目測距点を前記セグメント構成点に追加した場合の統計尺度に基づいて、前記注目測距点を前記セグメント構成点に追加するか否かを判定する、
請求項2または3に記載の路面状態検出装置。
【請求項5】
前記回帰線生成部は、所定の水平方位領域(Sg)内の前記測距点についての前記位置情報を取得する、点群抽出部(141)を備えた、
請求項1に記載の路面状態検出装置。
【請求項6】
前記回帰線生成部は、
複数の前記測距点のうちから、前記回帰線を生成するための代表点(Px)を抽出する、代表点抽出部(142)を備え、
前記代表点抽出部にて抽出した前記代表点に基づいて、前記回帰線を生成する、
請求項1に記載の路面状態検出装置。
【請求項7】
前記非路面点検出部は、前記路面構成線と前記測距点との前記高さ方向における距離と閾値との比較によって、前記測距点が前記非路面点であるか否かを判定する、
請求項1に記載の路面状態検出装置。
【請求項8】
測距センサ(3)により位置情報を検出した測距点(P)に基づいて、前記測距センサを搭載した自車両(V)の進行先の路面状態を検出する、路面状態検出装置(10)によって実行される、路面状態検出プログラムであって、
前記路面状態検出装置によって実行される処理は、
任意の水平方位の複数の前記測距点について、路面(R)および前記自車両の進行方向に沿った奥行方向と高さ方向とによる2次元座標系における回帰線(L)を生成する、回帰線生成処理(S103)と、
前記回帰線が前記路面に対応する路面構成線(Lgr)であるか前記路面に対応しない非路面構成線(Lgu)であるかの判定である属性判定を実行する、回帰線属性判定処理(S104)と、
前記回帰線属性判定処理による判定結果と、前記回帰線と前記測距点との位置関係とに基づいて、前記路面を構成しない前記測距点である非路面点(Pu)を検出する、非路面点検出処理(S105)と、
を含み、
前記回帰線属性判定処理にて、
前記回帰線の勾配変化を算出し、
前記奥行方向における所定距離内の前記勾配変化に基づいて前記属性判定を実行する、
路面状態検出プログラム。
【請求項9】
前記回帰線生成処理にて、前記奥行方向に並んだ複数の回帰線セグメント(Lg)からなる前記回帰線を生成し、
前記回帰線属性判定処理にて、前記奥行方向について隣接する前記回帰線セグメントの間の前記勾配変化を算出する、
請求項8に記載の路面状態検出プログラム。
【請求項10】
前記回帰線生成処理にて、線分による前記回帰線セグメントを生成し、
前記回帰線属性判定処理にて、前記奥行方向について隣接する前記線分の間の勾配差を算出する、
請求項9に記載の路面状態検出プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距センサにより位置情報を検出した測距点に基づいて、かかる測距センサを搭載した自車両の進行先の路面状態を検出する、路面状態検出装置および路面状態検出プログラムに関するものである。
続きを表示(約 4,900 文字)
【背景技術】
【0002】
特許文献1に記載された路面領域検出装置は、レーザセンサで取得した個々の測距点すなわち注目点に対し、注目点より俯角が上方向および下方向に隣接した測距点を、それぞれ1点ずつ一組の隣接点として抽出する。そして、隣接点と注目点とがなす角を算出して、注目点が隣接点を結ぶ直線上に存在するか否かを判定する。さらに、直線上に存在すると判定した点については、注目している点より下方の測距点に対する判定結果を判断材料として、路面を構成する可能性が高い測距点と、路面を構成する候補となる測距点とに分類する。次段階として、抽出した測距点について周囲の上記判定結果から路面を構成する測距点すなわち路面点を選択し、路面領域を示すデータを出力する。かかる路面領域検出装置によれば、注目点の形状判定結果に基づき測距点を路面点と候補点と路面点ではない測距点との3つに分類することが可能であるため、路面形状を精度よく判定することができる。
【先行技術文献】
【特許文献】
【0003】
特許第6903196号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、運転を支援する様々な機能が車両に搭載されている。かかる機能の一つとして、例えば、乗員の乗り心地を快適にするサスペンション制御のため、路面形状や凹凸を検出するニーズが増えつつある。特に、私有地や市街地に設置されている減速帯は、乗員への衝撃が大きい。このため、減速帯の検出機能を実装することで、乗り心地の快適さを実現することが可能となる。この点、例えば、減速帯における手前側部分の路面形状は、上り勾配の路面形状と類似する。よって、特許文献1に記載された技術によれば、隣接点と注目点とがなす角が勾配路面の場合と減速帯の場合とで同様の値となるために、勾配路面を減速帯と誤検出する可能性がある。
【0005】
本発明は、上記に例示した事情等に鑑みてなされたものである。すなわち、本発明は、例えば、減速帯のような路面凹凸を路面勾配と良好に区別して検出することを可能とする技術を提供するものである。
【課題を解決するための手段】
【0006】
路面状態検出装置(10)は、測距センサ(3)により位置情報を検出した測距点(P)に基づいて、前記測距センサを搭載した自車両(V)の進行先の路面状態を検出するように構成されている。
請求項1に記載の路面状態検出装置は、
複数の前記測距点について、路面(R)および前記自車両の進行方向に沿った奥行方向と高さ方向とによる2次元座標系における回帰線(L)を生成する、回帰線生成部(14)と、
前記回帰線が前記路面に対応する路面構成線(Lgr)であるか前記路面に対応しない非路面構成線(Lgu)であるかの判定である属性判定を実行する、回帰線属性判定部(15)と、
前記回帰線属性判定部による判定結果と、前記回帰線と前記測距点との位置関係とに基づいて、前記路面を構成しない前記測距点である非路面点(Pu)を検出する、非路面点検出部(13)と、
を備え、
前記回帰線属性判定部は、
前記回帰線の勾配変化を算出する、勾配差算出部(151)と、
前記奥行方向における所定距離内の前記勾配変化に基づいて前記属性判定を実行する、路面属性判定部(152)と、
を備えている。
路面状態検出プログラムは、測距センサ(3)により位置情報を検出した測距点(P)に基づいて、前記測距センサを搭載した自車両(V)の進行先の路面状態を検出する、路面状態検出装置(10)によって実行されるコンピュータプログラムである。
請求項8に記載の路面状態検出プログラムは、前記路面状態検出装置によって実行される処理として、
任意の水平方位の複数の前記測距点について、路面(R)および前記自車両の進行方向に沿った奥行方向と高さ方向とによる2次元座標系における回帰線(L)を生成する、回帰線生成処理(S103)と、
前記回帰線が前記路面に対応する路面構成線(Lgr)であるか前記路面に対応しない非路面構成線(Lgu)であるかの判定である属性判定を実行する、回帰線属性判定処理(S104)と、
前記回帰線属性判定処理による判定結果と、前記回帰線と前記測距点との位置関係とに基づいて、前記路面を構成しない前記測距点である非路面点(Pu)を検出する、非路面点検出処理(S105)と、
を含み、
前記回帰線属性判定処理にて、
前記回帰線の勾配変化を算出し、
前記奥行方向における所定距離内の前記勾配変化に基づいて前記属性判定を実行する。
【0007】
かかる構成によれば、回帰線生成部および回帰線生成処理は、複数の測距点について、奥行方向と高さ方向とによる2次元座標系における回帰線を生成する。回帰線属性判定部および回帰線属性判定処理は、回帰線の勾配変化を算出し、奥行方向における所定距離内の勾配変化に基づいて回帰線が路面に対応する路面構成線であるか路面に対応しない非路面構成線であるかの判定である属性判定を実行する。非路面点検出部および非路面点検出処理は、回帰線属性判定部による判定結果と、回帰線と測距点との位置関係とに基づいて、路面を構成しない測距点である非路面点を検出する。これにより、減速帯のような路面凹凸を路面勾配と良好に区別して検出することが可能となる。
【0008】
なお、出願書類の各欄において、各要素に括弧付きの参照符号が付される場合がある。しかしながら、かかる参照符号は、同要素と後述する実施形態に記載の具体的手段との対応関係の一例を、単に示すものにすぎない。よって、本発明は、上記の参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0009】
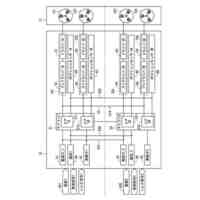
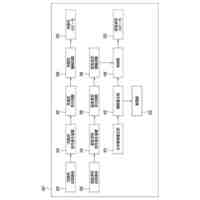
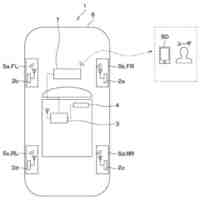
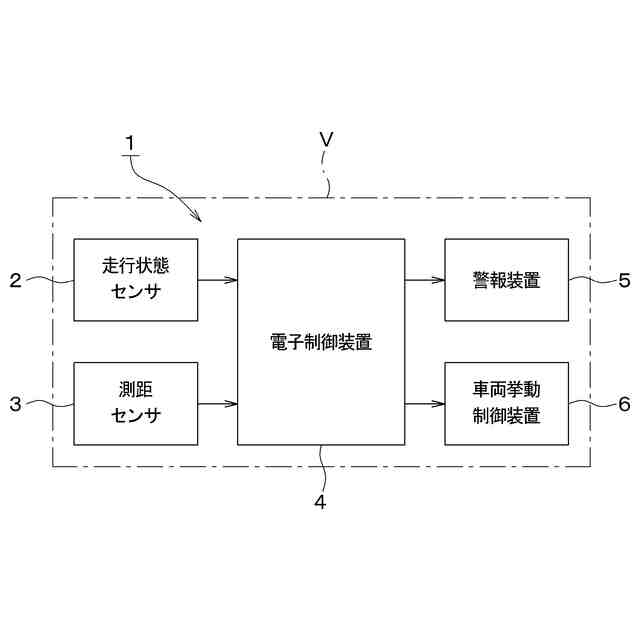
本発明の一実施形態に係る路面状態検出装置を構成する電子制御装置を備えた車載システムの概略的な構成を示すブロック図である。
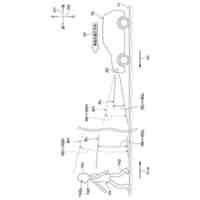
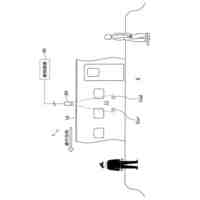
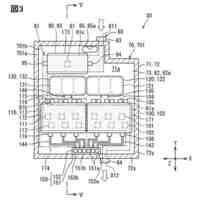
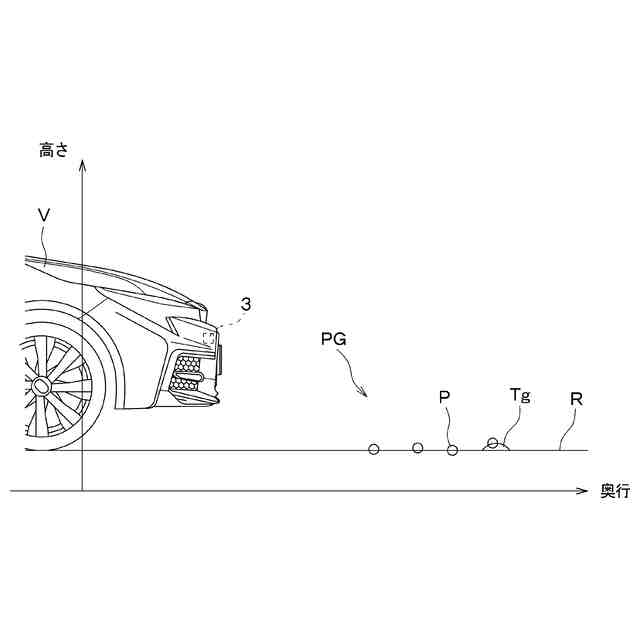
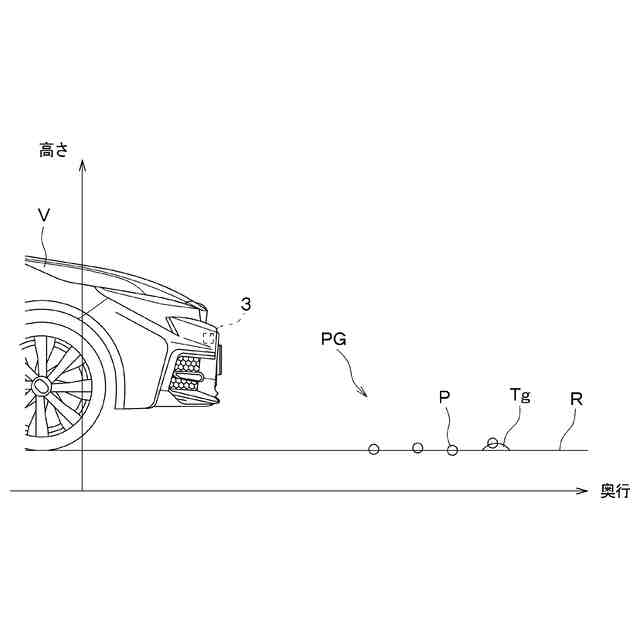
図1に示された測距センサによる測距動作の概要を示す概念図である。
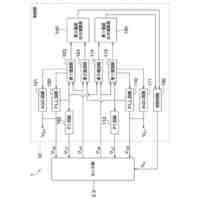
本発明の一実施形態に係る路面状態検出装置の概略的な機能構成を示すブロック図である。
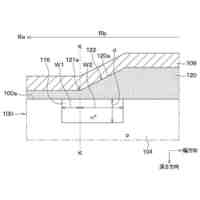
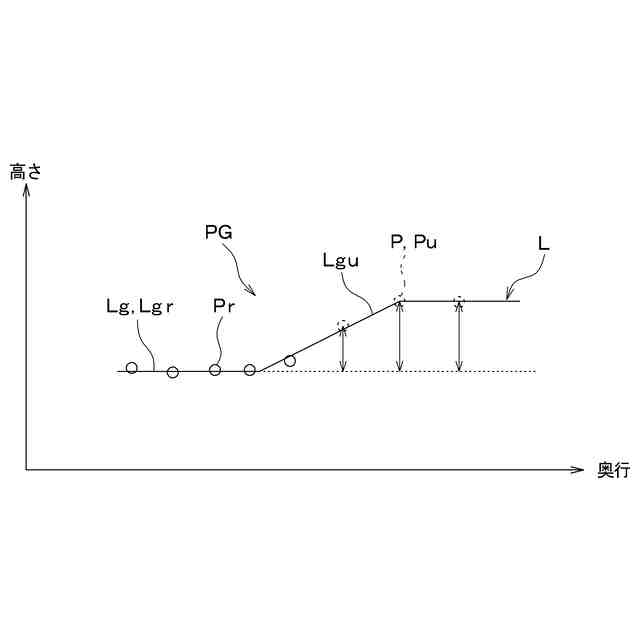
ほぼ平坦な路面上に減速帯が設けられている場合の路面状態の一例を示す概略図である。
図4に示された減速帯のような凹凸を有しない勾配路面における路面状態の一例を示す概略図である。
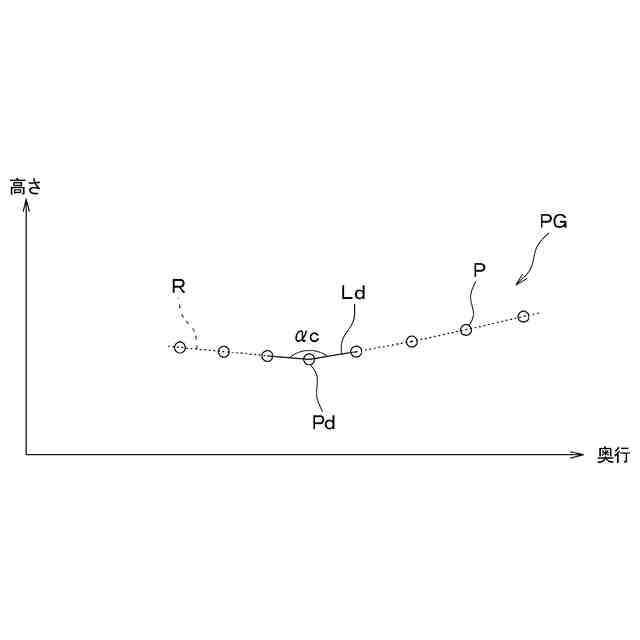
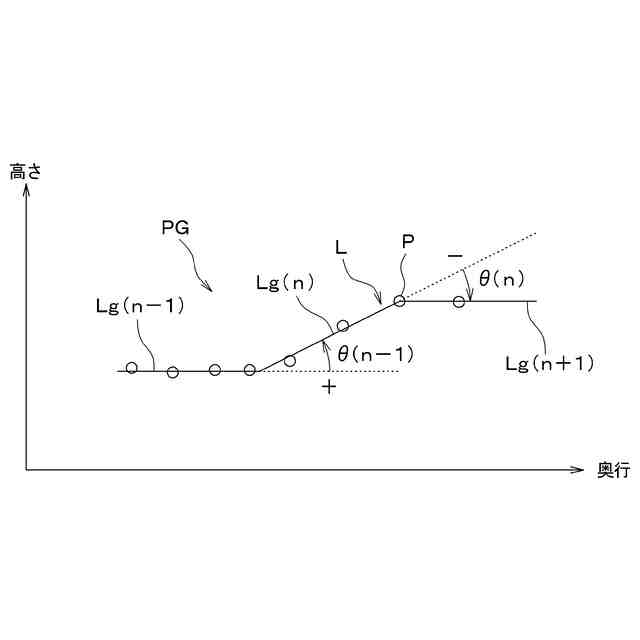
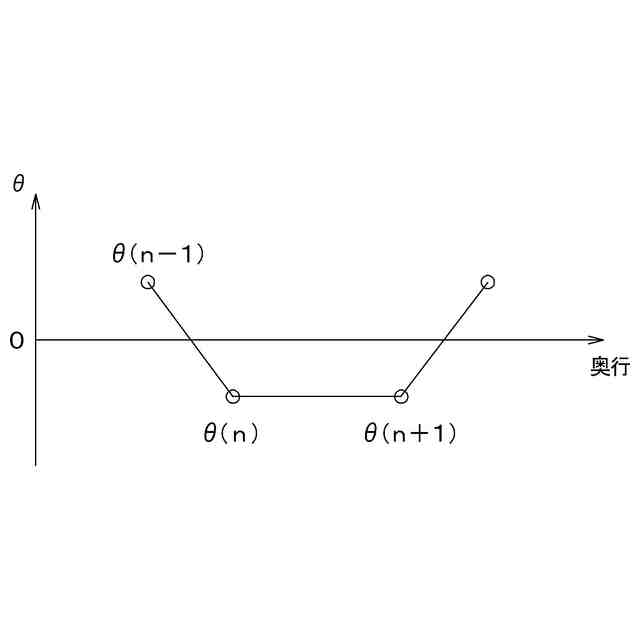
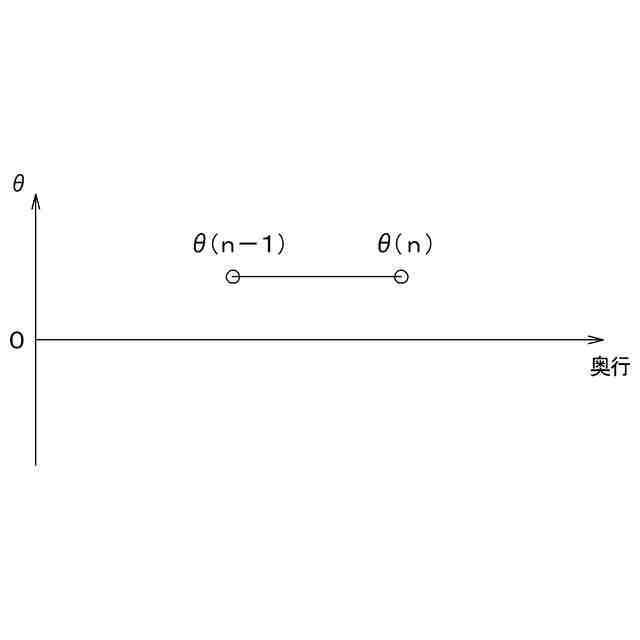
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示す概念図である。
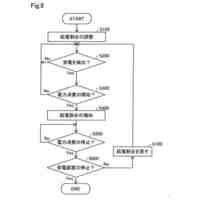
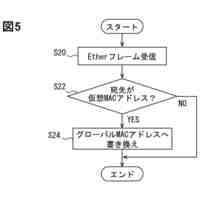
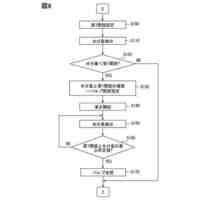
本実施形態に係る路面状態検出装置および路面状態検出プログラムによる路面状態検出の概要を示すフローチャートである。
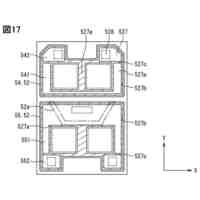
図16に示されたフローチャートにおけるステップ103の処理内容の概要を示すフローチャートである。
図17に示されたフローチャートにおけるステップ203およびステップ204の処理内容の概要を示す概念図である。
図17に示されたフローチャートにおけるステップ203およびステップ204の処理内容の概要を示す概念図である。
図17に示されたフローチャートにおけるステップ203およびステップ204の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ104の処理内容の概要を示すフローチャートである。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図28に示されたフローチャートによる処理内容の具体例を示す概念図である。
図16に示されたフローチャートにおけるステップ105の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ105の処理内容の概要を示す概念図である。
図16に示されたフローチャートにおけるステップ105の処理内容の概要を示す概念図である。
【発明を実施するための形態】
【0010】
(実施形態)
以下、本発明の例示的な実施形態や具体例について、適宜図面を参照しつつ説明する。図1を参照すると、車載システム1は、自車両Vに搭載されている。自車両Vは、地上すなわち道路上を走行する、いわゆる自動車であって、箱状の車体を備えている。車載システム1は、自車両Vに搭載されることで、かかる自車両Vにおける運転制御や挙動制御等の各種機能(例えばサスペンション制御やADAS制御等)を実現可能に構成されている。ADASはAdvanced Driver-Assistance Systemsの略である。具体的には、車載システム1は、走行状態センサ2と、測距センサ3と、電子制御装置4と、警報装置5と、車両挙動制御装置6とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
19日前
株式会社デンソー
通信装置
20日前
株式会社デンソー
電子装置
19日前
株式会社デンソー
電子装置
19日前
株式会社デンソー
受電装置
17日前
株式会社デンソー
ステータ
11日前
株式会社デンソー
受電装置
11日前
株式会社デンソー
熱音響装置
12日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
半導体装置
12日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
10日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
通信レシーバ
10日前
株式会社デンソー
電子制御装置
19日前
株式会社デンソー
スパークプラグ
20日前
株式会社デンソー
睡眠補助用装置
13日前
株式会社デンソーエレクトロニクス
前照灯制御装置
13日前
株式会社デンソー
ジャイロセンサ
11日前
株式会社デンソーウェーブ
コード読取装置
11日前
株式会社デンソー
コンデンサ装置
12日前
株式会社デンソーウェーブ
食事管理システム
17日前
株式会社デンソーウェーブ
作業管理システム
18日前
株式会社デンソー
通信トランシーバ
10日前
株式会社デンソー
半導体装置の製造方法
19日前
株式会社デンソーウェーブ
停車位置検知システム
12日前
株式会社デンソー
タイヤ空気圧監視システム
19日前
株式会社デンソー
点火プラグとその製造方法
2日前
株式会社デンソー
潅水システムおよび制御装置
4日前
株式会社デンソー
センサ固定具および温度検出装置
11日前
トヨタ自動車株式会社
制御装置
18日前
株式会社デンソー
音処理装置および音処理プログラム
17日前
株式会社デンソー
電力変換装置及び回転電機ユニット
11日前
株式会社デンソー
電力変換装置及び回転電機ユニット
11日前
株式会社デンソー
電力変換装置及び回転電機ユニット
11日前
株式会社デンソー
電力変換装置及び回転電機ユニット
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ