TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101411
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218246
出願日
2023-12-25
発明の名称
可変磁束モータの制御プログラム
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H02P
21/22 20160101AFI20250630BHJP(電力の発電,変換,配電)
要約
【課題】可変磁束モータの着磁あるいは減磁を確実に行わせることが可能な可変磁束モータの制御プログラムを提供する。
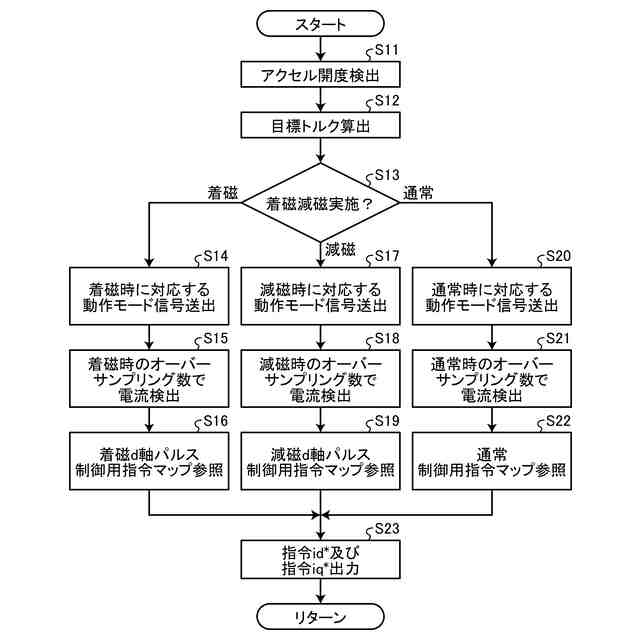
【解決手段】実施形態の可変磁束モータの制御プログラムは、可変磁束モータの電流制御を行う可変磁束モータの制御装置をコンピュータにより制御するための可変磁束モータの制御プログラムであり、コンピュータを、動作モードが通常制御時、着磁制御時あるいは減磁制御時のいずれであるかを判断して、動作モード信号を出力する手段と、電流センサの出力した電流検出信号を前記動作モード信号に対応する所定のオーバーサンプリング数をサンプリングして電流検出データを生成する手段と、前記電流検出データに基づいて前記可変磁束モータの電流制御を行う手段と、前記減磁制御時の前記オーバーサンプリング数を前記着磁制御時のオーバーサンプリング数よりも多くする手段と、して機能させる。
【選択図】図3
特許請求の範囲
【請求項1】
可変磁束モータの電流制御を行う可変磁束モータの制御装置をコンピュータにより制御するための可変磁束モータの制御プログラムにおいて、
前記コンピュータを、
動作モードが通常制御時、着磁制御時あるいは減磁制御時のいずれであるかを判断して、動作モード信号を出力する手段と、
電流センサの出力した電流検出信号を前記動作モード信号に対応する所定のオーバーサンプリング数をサンプリングして電流検出データを生成する手段と、
前記電流検出データに基づいて前記可変磁束モータの電流制御を行う手段と、
前記減磁制御時の前記オーバーサンプリング数を前記着磁制御時のオーバーサンプリング数よりも多くする手段と、
して機能させる可変磁束モータの制御プログラム。
続きを表示(約 94 文字)
【請求項2】
前記着磁制御時の前記オーバーサンプリング数を前記通常制御時のオーバーサンプリング数よりも多くする、
請求項1に記載の可変磁束モータの制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、可変磁束モータの制御プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、インバータから固定子巻線に供給される磁化電流によって永久磁石の磁力を変化させる可変磁束モータが知られている。
この可変磁束モータは、車両の運転状態に応じて永久磁石の磁力を変化させることにより、駆動時の損失を低減させて、モータ効率を向上させることができるという特性を有している。
【先行技術文献】
【特許文献】
【0003】
特開2018-085851号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記従来の可変磁束モータにおいては、着磁時には着磁用電流を供給し、減磁時に減磁用電流を供給する。
この場合において、着磁用電流あるいは減磁用電流が目標電流値に達したか否かを、実測した電流値と比較することとなるが、実測した電流値が可変磁束モータに実際に流れている電流の電流値とに大きな乖離があると、着磁又は減磁を確実に行うことができない。
このため、従来技術においては、電流制御安定性のためインダクタンスを推定することが提案されているが、着磁又は減磁の際にどのように電流制御を安定させるかは提案されていない。
【0005】
本発明の目的は、可変磁束モータの着磁あるいは減磁を確実に行わせることが可能な可変磁束モータの制御プログラムを提供することにある。
【課題を解決するための手段】
【0006】
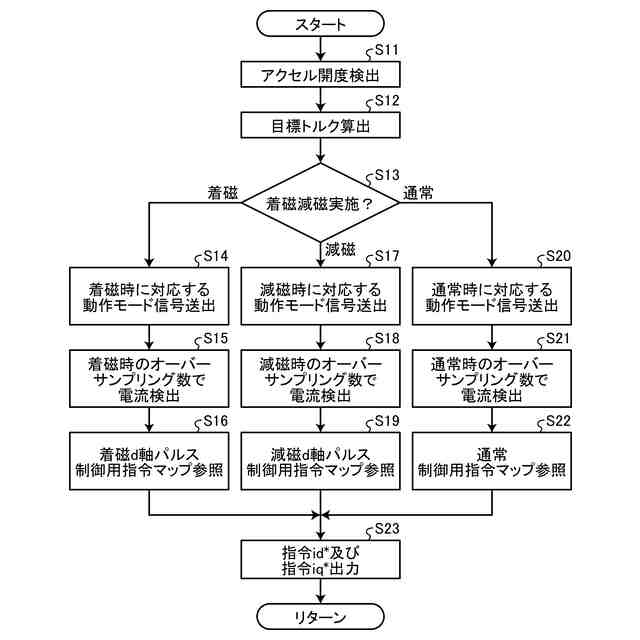
上記目的を達成するため、実施形態の可変磁束モータの制御プログラムは、可変磁束モータの電流制御を行う可変磁束モータの制御装置をコンピュータにより制御するための可変磁束モータの制御プログラムであり、コンピュータを、動作モードが通常制御時、着磁制御時あるいは減磁制御時のいずれであるかを判断して、動作モード信号を出力する手段と、電流センサの出力した電流検出信号を前記動作モード信号に対応する所定のオーバーサンプリング数をサンプリングして電流検出データを生成する手段と、前記電流検出データに基づいて前記可変磁束モータの電流制御を行う手段と、前記減磁制御時の前記オーバーサンプリング数を前記着磁制御時のオーバーサンプリング数よりも多くする手段と、して機能させる。
この構成によれば、より精度が要求される減磁制御時における電流検出精度を高くすることができ、可変磁束モータの着磁あるいは減磁を確実に行わせることができる。
【0007】
また、上記構成において、前記着磁制御時の前記オーバーサンプリング数を前記通常制御時のオーバーサンプリング数よりも多くする、
この構成によれば、着磁制御時の電流検出精度を通常制御時よりも高くすることができ、通常制御時の負荷を低減でき、処理負荷を全体として低減できる。
【発明の効果】
【0008】
本発明によれば、可変磁束モータの着磁あるいは減磁を行う場合に、実際に可変磁束モータに流れる電流を高精度で検出して、可変磁束モータの着磁あるいは減磁を確実に行える。
【図面の簡単な説明】
【0009】
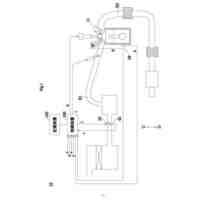
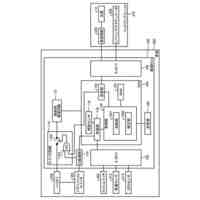
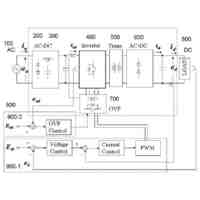
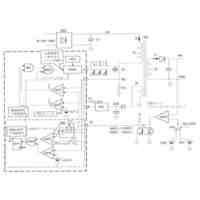
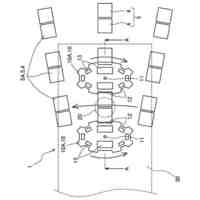
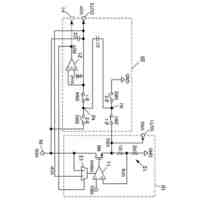
図1は、実施形態の可変磁束モータ制御装置の概要構成図である。
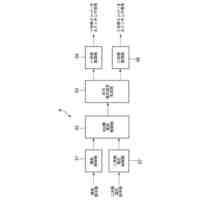
図2は、ベクトル制御マップの構成説明図である。
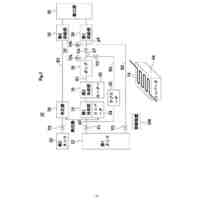
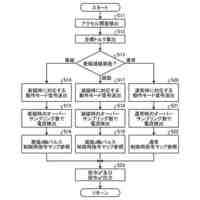
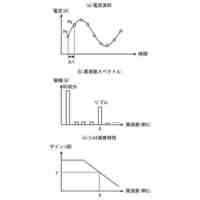
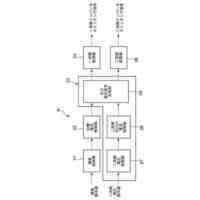
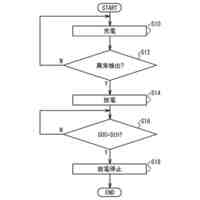
図3は、実施形態の可変磁束モータ制御装置の動作フローチャートである。
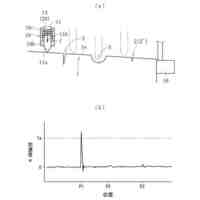
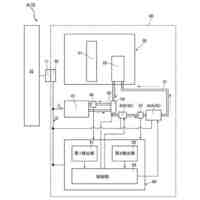
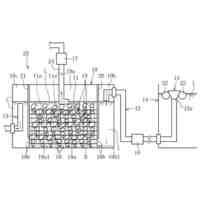
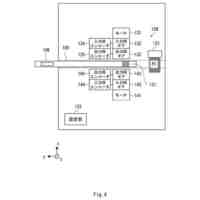
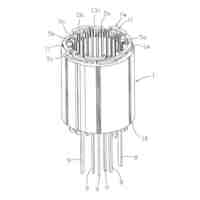
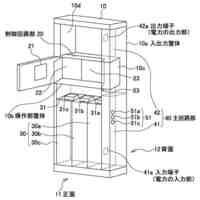
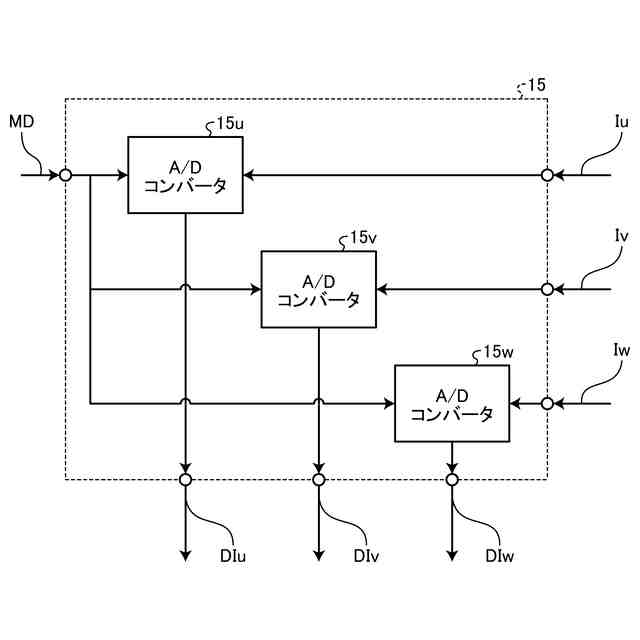
図4は、電流検出ユニットの概要構成ブロック図である。
【発明を実施するための形態】
【0010】
以下では、本発明の実施の形態について、添付図面を参照しつつ詳細に説明する。
図1は、実施形態の可変磁束モータ制御装置の概要構成図である。
実施形態の可変磁束モータ制御装置10は、図1に示すように、ベクトル制御器11と、電流フィードバック制御器12と、dq軸/UVW相変換器13と、PWM電圧インバータ14と、電流センサSu、Sv、Swと、電流検出ユニット15と、UVW相/dq軸変換器16と、コントローラ17と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ダイハツ工業株式会社
制御装置
2日前
ダイハツ工業株式会社
固定治具
3日前
ダイハツ工業株式会社
車両構造
23日前
ダイハツ工業株式会社
車両構造
23日前
ダイハツ工業株式会社
車両構造
24日前
ダイハツ工業株式会社
亀裂検出装置
2日前
ダイハツ工業株式会社
充電システム
3日前
ダイハツ工業株式会社
暖房システム
10日前
ダイハツ工業株式会社
車両用制御装置
今日
ダイハツ工業株式会社
燃料供給システム
23日前
ダイハツ工業株式会社
充電制御システム
25日前
ダイハツ工業株式会社
切削液の油分分離装置
24日前
ダイハツ工業株式会社
可変磁束モータの制御プログラム
25日前
ニデック株式会社
モータ
8日前
個人
恒久電源開発の装置
1か月前
個人
発電装置
2日前
個人
電流制御形AC-DC電源
1日前
個人
ステッピングモータ実習装置
15日前
キヤノン株式会社
電源装置
29日前
キヤノン株式会社
電源装置
2日前
株式会社竹中工務店
避雷設備
29日前
トヨタ自動車株式会社
充電方法
22日前
トヨタ自動車株式会社
駆動装置
4日前
ダイハツ工業株式会社
溶接装置
1か月前
サンデン株式会社
電力変換装置
9日前
サンデン株式会社
電力変換装置
9日前
愛知電機株式会社
ステータおよびモータ
1か月前
愛知電機株式会社
ステータおよびモータ
1か月前
愛知電機株式会社
ステータおよびモータ
1か月前
個人
回転力発生装置
今日
トヨタ自動車株式会社
電池システム
7日前
日産自動車株式会社
回転電機
4日前
株式会社エスイー
上載物の支持装置
29日前
ミツミ電機株式会社
電源回路
3日前
ダイハツ工業株式会社
充電システム
3日前
新電元工業株式会社
充電装置
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ