TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101113
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217717
出願日
2023-12-25
発明の名称
飛行体の自動着陸システムおよび飛行体の自動着陸方法
出願人
国立大学法人東北大学
代理人
個人
主分類
B64U
70/95 20230101AFI20250630BHJP(航空機;飛行;宇宙工学)
要約
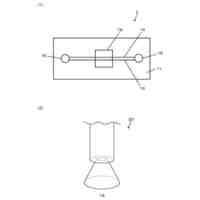
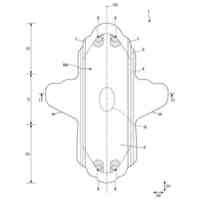
【課題】可視標識の一部が認識できないときであっても、飛行体の位置や姿勢を推定することができ、飛行体を自動で着陸させることができる飛行体の自動着陸システムおよび飛行体の自動着陸方法を提供する。
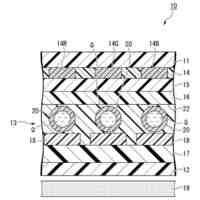
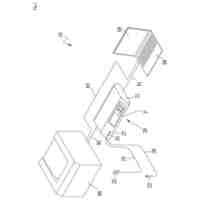
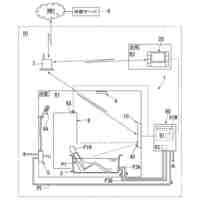
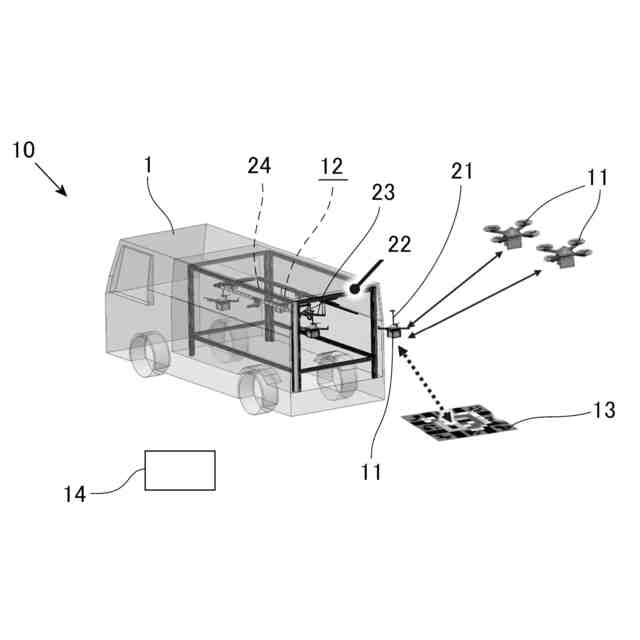
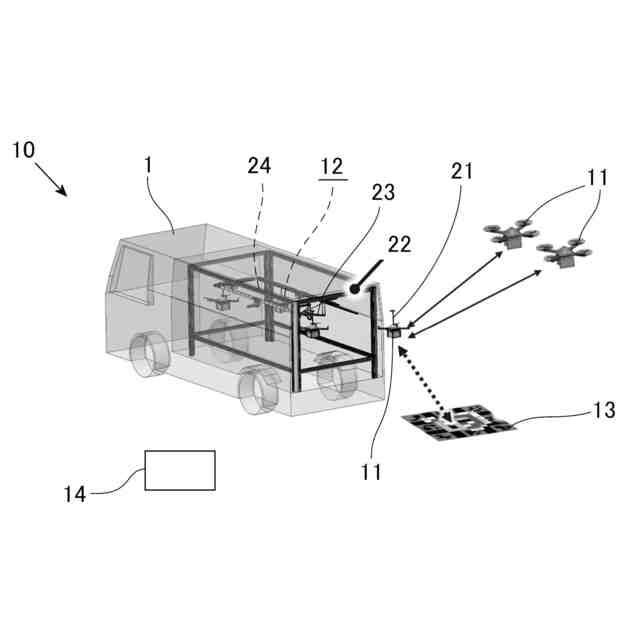
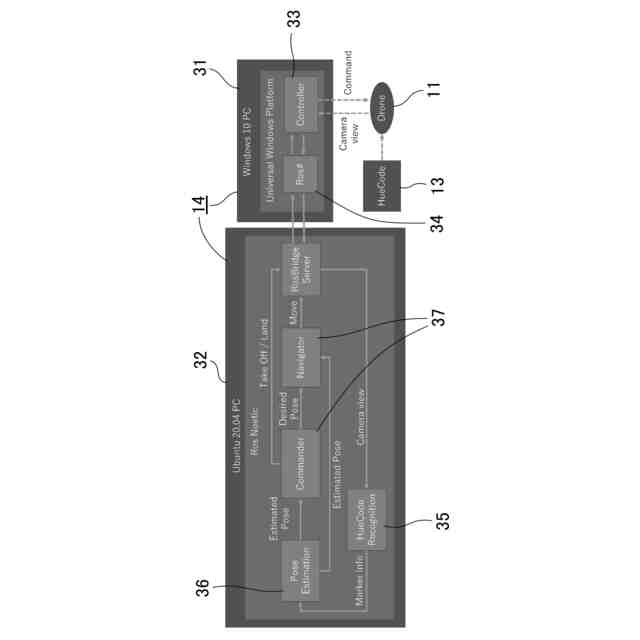
【解決手段】着陸ポート12が、カメラが搭載された飛行体11を着陸させるよう構成されている。可視標識13が、複数種類の大きさの複数のマーカを色相別に重ね合わせて成り、着陸ポート12の近傍に配置されている。制御部14が、飛行体11が飛行中、カメラにより取得された画像中に、可視標識13中の各マーカのうちの1つまたは複数が写ったとき、そのマーカを識別すると共に、識別されたマーカに基づいて、可視標識13または着陸ポート12に対する飛行体11の位置と姿勢とを推定し、その推定結果に基づいて、飛行体11を着陸ポート12に着陸させるよう飛行体11の動きを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
カメラが搭載された飛行体と、
前記飛行体を着陸させるための着陸ポートと、
複数種類の大きさの複数のマーカを色相別に重ね合わせて成り、前記着陸ポートまたは前記着陸ポートの近傍に配置された可視標識と、
前記飛行体が飛行中、前記カメラにより取得された画像中に、前記可視標識中の各マーカのうちの1つまたは複数が写ったとき、そのマーカを識別すると共に、識別されたマーカに基づいて、前記可視標識または前記着陸ポートに対する前記飛行体の位置と姿勢とを推定し、推定した前記飛行体の位置と姿勢とに基づいて、前記飛行体を前記着陸ポートに着陸させるよう前記飛行体の動きを制御する制御部とを、
有することを特徴とする飛行体の自動着陸システム。
続きを表示(約 1,400 文字)
【請求項2】
前記可視標識は、複数から成り、前記飛行体を前記着陸ポートに誘導するようそれぞれ配置されていることを特徴とする請求項1記載の飛行体の自動着陸システム。
【請求項3】
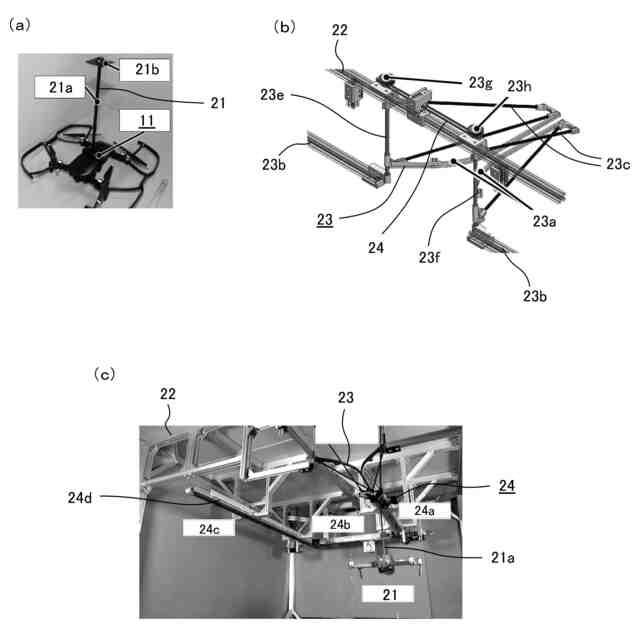
前記飛行体は、上部に吊下部を有し、
前記着陸ポートは、互いに間隔を開けて並べて配置され、少なくとも下方および一端側の延長方向に空間をあけて配置された1対のレールを有し、前記吊下部を前記一端側から各レールの間に挿入して、各レールの所定の着陸位置で前記飛行体を吊り下げ可能、かつ、前記着陸位置で吊り下げられた前記飛行体が離陸可能に構成されており、
前記制御部は、前記吊下部を前記一端側から各レールの間に挿入して、前記着陸位置で前記飛行体を吊り下げた状態で着陸させるよう、前記飛行体の動きを制御可能に構成されていることを
特徴とする請求項1または2記載の飛行体の自動着陸システム。
【請求項4】
複数種類の大きさの複数のマーカを色相別に重ね合わせて成る可視標識を、カメラが搭載された飛行体を着陸させるための着陸ポートまたは前記着陸ポートの近傍に配置しておき、
前記飛行体が飛行中、前記カメラにより取得された画像中に、前記可視標識中の各マーカのうちの1つまたは複数が写ったとき、そのマーカを識別すると共に、識別されたマーカに基づいて、前記可視標識または前記着陸ポートに対する前記飛行体の位置と姿勢とを推定し、推定した前記飛行体の位置と姿勢とに基づいて前記飛行体の動きを制御して、前記飛行体を前記着陸ポートに着陸させることを
特徴とする飛行体の自動着陸方法。
【請求項5】
前記飛行体を前記着陸ポートに誘導するよう、複数の前記可視標識を配置しておくことを特徴とする請求項4記載の飛行体の自動着陸方法。
【請求項6】
前記飛行体は、上部に吊下部を有し、
前記着陸ポートは、互いに間隔を開けて並べて配置され、少なくとも下方および一端側の延長方向に空間をあけて配置された1対のレールを有し、前記吊下部を前記一端側から各レールの間に挿入して、各レールの所定の着陸位置で前記飛行体を吊り下げ可能、かつ、前記着陸位置で吊り下げられた前記飛行体が離陸可能に構成されており、
前記飛行体の動きを制御し、前記吊下部を前記一端側から各レールの間に挿入して、前記着陸位置で前記飛行体を吊り下げた状態で着陸させることを
特徴とする請求項4または5記載の飛行体の自動着陸方法。
【請求項7】
飛行体と、
前記飛行体を着陸させるための着陸ポートと、
前記着陸ポートまたは前記着陸ポートの近傍に配置されたカメラと、
複数種類の大きさの複数のマーカを色相別に重ね合わせて成り、前記飛行体に取り付けられた可視標識と、
前記飛行体が飛行中、前記カメラにより取得された画像中に、前記可視標識中の各マーカのうちの1つまたは複数が写ったとき、そのマーカを識別すると共に、識別されたマーカに基づいて、前記着陸ポートに対する前記飛行体の位置と姿勢とを推定し、推定した前記飛行体の位置と姿勢とに基づいて、前記飛行体を前記着陸ポートに着陸させるよう前記飛行体の動きを制御する制御部とを、
有することを特徴とする飛行体の自動着陸システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体の自動着陸システムおよび飛行体の自動着陸方法に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、比較的狭い空間でも、ドローンなどの飛行体がスムーズに離着陸することができるシステムとして、互いに間隔を開けて並べて配置され、少なくとも下方および一端側の延長方向に空間をあけて配置された1対のレールと、上部に、一端側から各レールの間に挿入可能に設けられた吊下部を有する飛行体とを有し、各レールの間に吊下部が挿入された状態で、各レールの所定の着陸位置で飛行体を吊り下げ可能、かつ、着陸位置で吊り下げられた飛行体が離陸可能に構成された飛行体離着陸システムが、本発明者等により開発されている(例えば、特許文献1参照)。この飛行体離着陸システムでは、各レールを、他端側の延長方向にも空間をあけて配置し、着陸位置で吊り下げられた飛行体が、他端側から離陸可能に構成することにより、着陸時に飛行体が各レールに入ってくる方向と、離陸時に飛行体が各レールから出ていく方向とを変えることができるため、次々と着陸する飛行体を順番に離陸させることができ、複数台の飛行体を連続して離着陸させることができる。
【0003】
また、飛行体を着陸位置までスムーズに案内するために、特許文献1に記載の飛行体離着陸システムの一方の先端側に受動型案内機構を有し、受動型案内機構は、互いに間隔を開けて並べて配置され、それぞれの一方の先端に向かって互いの間隔が広がるよう設けられた1対の案内レールを有し、一方の案内レールは、その一方の先端またはその近傍で、各案内レールを含む平面に対して垂直方向に伸びる第1の軸を中心として回転可能に支持され、他方の案内レールは、その一方の先端またはその近傍で、各案内レールを含む平面に対して垂直方向に伸びる第2の軸を中心として回転可能に支持されており、飛行体の吊下部を各案内レールの間から各レールの間に移動させて、飛行体を着陸位置に着陸させる飛行体着陸システムが、本発明者等により開発されている(例えば、特許文献2参照)。
【0004】
さらに、飛行体の自動離着陸システムとして、特許文献1記載の飛行体離着陸システムおよび特許文献2記載の飛行体着陸システム、並びに、QRコード(登録商標)およびARマーカの2種を重畳した可視標識(以下、「HueCode」と呼ぶ)を用いて、衛星測位システム(GNSS;global navigation satellite system)を利用できない屋内などでも運用可能なシステムが、本発明者等により開発されている(例えば、非特許文献1乃至3参照)。このHueCodeを利用したシステムでは、例えば、飛行体に搭載したカメラで、着陸ポートの識別IDを格納したQRコードを読み取ることにより、飛行体が着陸する着陸ポートを識別すると共に、ARマーカを読み取ることにより、飛行体の相対的な姿勢を推定することができる。また、それらの情報に基づいて飛行体を制御して、着陸ポートに自動で着陸させ、順次離陸させることができることが実証されている。
【0005】
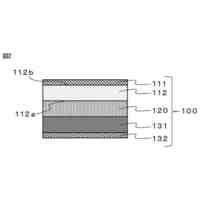
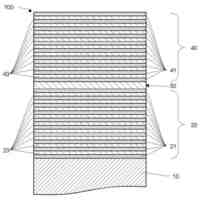
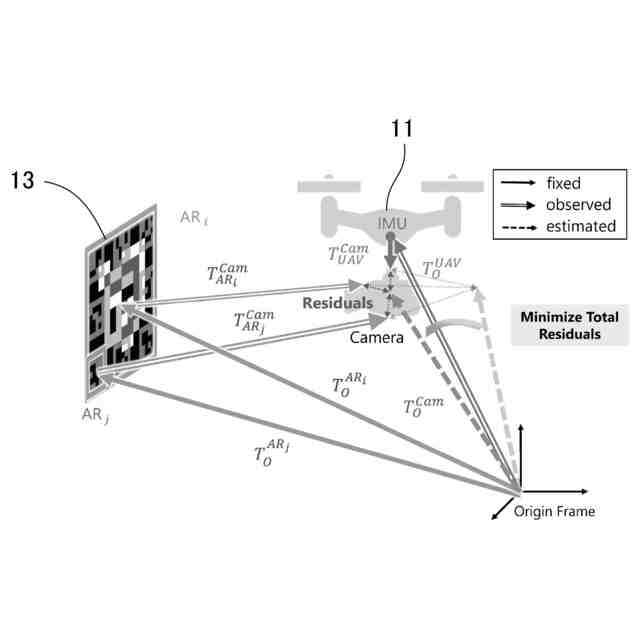
なお、HueCodeをさらに改良した、複数種類の大きさの複数のARマーカを色相別に重ね合わせて成る可視標識(以下、「AR-HueCode」とも呼ぶ)として、6色を用いて、3種類の大きさのARマーカを10個重畳したものが、本発明者等により提案されている(例えば、非特許文献4参照)。このAR-HueCodeによれば、複数のARマーカを用いて飛行体の姿勢推定を行うことにより、高精度の姿勢推定が可能であると共に、大きさの異なるARマーカを重畳することにより、飛行体からのAR-HueCodeの認識可能距離を拡大することができるという利点が得られる。なお、飛行体の姿勢推定には、各ARマーカによる姿勢推定の結果を、グラフ最適化により統合することにより、高精度の姿勢推定を行っている。
【先行技術文献】
【特許文献】
【0006】
国際公開WO2021/029233号
国際公開WO2021/176914号
【非特許文献】
【0007】
藤倉大貴、横田将輝、岡田佳都、多田隈建二郎、渡辺将広、大野和則、田所諭、「色相別重畳マーカによる相対姿勢推定に基づく吊り下げ式移動可能ポートへのドローン連続自動離着陸システム」、第22回 計測自動制御学会システムインテグレーション部門講演会、計測自動制御学会、2021年、p. 1192-1195
Yoshito Okada, Daiki Fujikura, Yu Ozawa, Kenjiro Tadakuma, Kazunori, Ohno, and Satoshi Tadokoro, “Huecode: A Meta-marker Exposing Relative Pose and Additional Information in Different Colored Layers”, In 2021 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2021, p.5928-5934
Yoshiki Yokota, Daiki Fujikura, Yoshito Okada, Kazunori Ohno, Kenjiro Tadakuma, and Satoshi Tadokoro, “Huecode2: An Illumination-Robust Meta-Marker Overlaying Multiple Fiducial Markers using Optimal Color Scheme”, In 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), IEEE, 2022, p. 583-588
横田将輝、岡田佳都、藤倉大貴、大野和則、多田隈建二郎、田所諭、「ARHueCode:多数のARマーカの色相別重畳により高精度姿勢推定を可能とする複合マーカ」、第22回 計測自動制御学会システムインテグレーション部門講演会、計測自動制御学会、2021年、p. 1284-1287
【発明の概要】
【発明が解決しようとする課題】
【0008】
非特許文献1乃至3に記載の、可視標識であるHueCodeを用いた飛行体の自動離着陸システムでは、GNSSを用いた場合よりも高精度に、飛行体の位置や姿勢を推定することができ、屋内であっても、飛行体を自動的に離着陸させることができる。しかし、HueCode中にQRコードおよびARマーカが1つずつしかないため、障害物や汚れなどにより、HueCodeの一部が認識できないときには、飛行体の位置や姿勢の推定を行うことができないという課題があった。なお、非特許文献4では、AR-HueCodeを用いて、飛行体を制御したり自動で着陸させたりすることは行われていない。
【0009】
本発明は、このような課題に着目してなされたもので、可視標識の一部が認識できないときであっても、飛行体の位置や姿勢を推定することができ、飛行体を自動で着陸させることができる飛行体の自動着陸システムおよび飛行体の自動着陸方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る飛行体の自動着陸システムは、カメラが搭載された飛行体と、前記飛行体を着陸させるための着陸ポートと、複数種類の大きさの複数のマーカを色相別に重ね合わせて成り、前記着陸ポートまたは前記着陸ポートの近傍に配置された可視標識と、前記飛行体が飛行中、前記カメラにより取得された画像中に、前記可視標識中の各マーカのうちの1つまたは複数が写ったとき、そのマーカを識別すると共に、識別されたマーカに基づいて、前記可視標識または前記着陸ポートに対する前記飛行体の位置と姿勢とを推定し、推定した前記飛行体の位置と姿勢とに基づいて、前記飛行体を前記着陸ポートに着陸させるよう前記飛行体の動きを制御する制御部とを、有することを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人東北大学
試験装置
5か月前
国立大学法人東北大学
熱電材料
3か月前
国立大学法人東北大学
液晶装置
1か月前
国立大学法人東北大学
連携システム
3か月前
国立大学法人東北大学
異物吸引装置
25日前
国立大学法人東北大学
認知機能改善剤
4か月前
国立大学法人東北大学
消化器癌の検出方法
5か月前
国立大学法人東北大学
発電素子、発電装置
9日前
国立大学法人東北大学
通信回路及び変調方法
2か月前
国立大学法人東北大学
インフラマソーム阻害剤
9日前
国立大学法人東北大学
チタン合金とその製造方法
9日前
デンカ株式会社
模擬臓器
27日前
株式会社深松組
蓄熱システム
4か月前
大王製紙株式会社
吸収性物品
2か月前
リンナイ株式会社
浴室システム
2か月前
国立大学法人東北大学
周波数選択透過性誘電体フィルタ
2か月前
国立大学法人東北大学
熱電材料および熱電材料の製造方法
1か月前
国立大学法人東北大学
ペプチド又はその塩、ならびに核酸
5か月前
国立大学法人東北大学
脊髄梗塞治療のための多能性幹細胞
23日前
株式会社C&A
金属部材および製品
2か月前
住友化学株式会社
リチウム二次電池
2か月前
株式会社C&A
処理装置および方法
3か月前
デンカ株式会社
医療用配管の保持器
1か月前
株式会社C&A
金属部材および製品
2か月前
株式会社C&A
金属部材および製品
2か月前
株式会社C&A
金属部材および製品
2か月前
株式会社C&A
金属部材および製品
2か月前
株式会社タムラ製作所
遅延制御回路
2か月前
株式会社オサチ
感覚障害評価システム
1か月前
国立大学法人東北大学
コンクリート組成物、コンクリート構造物
5か月前
トヨタ自動車株式会社
リチウム二次電池
2か月前
リンナイ株式会社
生体情報検出システム
2か月前
信越化学工業株式会社
磁気ドメイン構造体
1か月前
日本重化学工業株式会社
リチウムの回収方法
4か月前
東ソー株式会社
環状ウレア化合物の製造方法
5か月前
京セラ株式会社
半導体装置及びその製造方法
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ