TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100832
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2025070582,2023550915
出願日
2025-04-22,2021-09-30
発明の名称
数値制御装置
出願人
ファナック株式会社
代理人
あいわ弁理士法人
主分類
G05B
19/4069 20060101AFI20250626BHJP(制御;調整)
要約
【課題】フィードバック情報に基づいて行なわれるシミュレーションに工具交換のシミュレーションを、タイミングを合わせて組み入れて加工シミュレーションを実行することが可能な数値制御装置を提供する。
【解決手段】
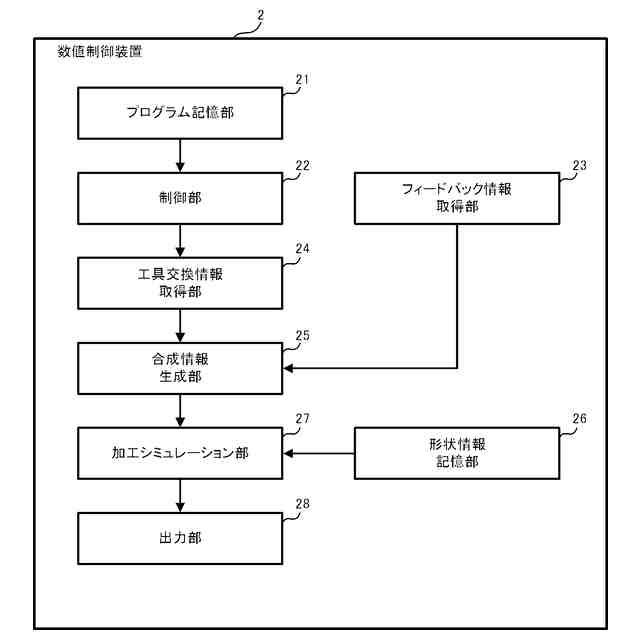
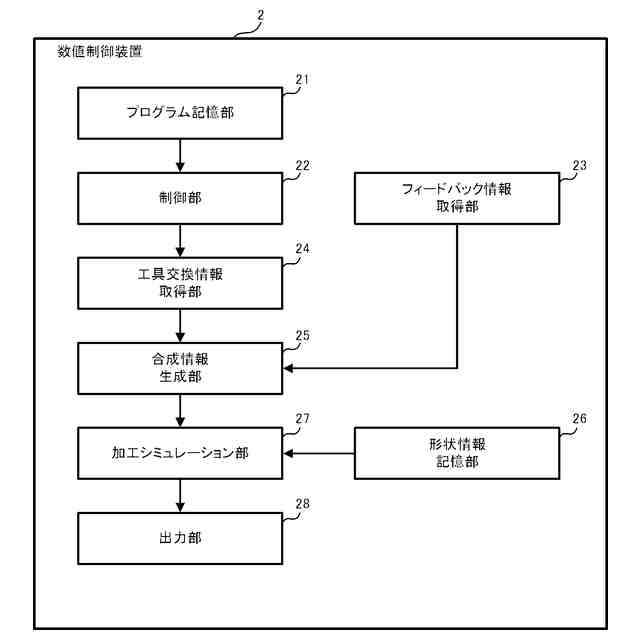
数値制御装置が、制御部と、フィードバック情報取得部と、工具交換情報取得部と、フィードバック情報取得部によって取得されたフィードバック情報と、工具交換情報取得部によって取得された工具情報および交換情報とを合成して合成情報を生成する合成情報生成部と、工具の形状を示す形状情報を記憶する形状情報記憶部と、合成情報、および形状情報に基づいて、ワークの加工シミュレーションを実行する加工シミュレーション部と、加工シミュレーションを実行することによって生成された加工後のワークの形状を示す加工形状情報を出力する出力部と、を備える。
【選択図】 図2
特許請求の範囲
【請求項1】
工具を特定する工具情報を含む加工プログラムを解釈して工作機械の軸を制御する制御部と、
前記軸の位置を示すフィードバック情報を前記工作機械から取得するフィードバック情報取得部と、
前記加工プログラムから前記工具情報を取得し、かつ、前記工具が交換されたことを示す交換情報を前記工作機械から取得する工具交換情報取得部と、
前記フィードバック情報取得部によって取得された前記フィードバック情報と、前記工具交換情報取得部によって取得された前記工具情報および前記交換情報とを合成して合成情報を生成する合成情報生成部と、
前記工具の形状を示す形状情報を記憶する形状情報記憶部と、
前記合成情報、および前記形状情報に基づいて、ワークの加工シミュレーションを実行する加工シミュレーション部と、
前記加工シミュレーションを実行することによって生成された加工後のワークの形状を示す加工形状情報を出力する出力部と、
を備える数値制御装置。
続きを表示(約 270 文字)
【請求項2】
前記合成情報生成部は、前記フィードバック情報の取得に係る時間軸と前記交換情報の取得に係る時間軸とを一致させて前記合成情報を生成する請求項1に記載の数値制御装置。
【請求項3】
前記フィードバック情報取得部と前記工具交換情報取得部とは、前記工作機械から1制御周期内において、それぞれ、前記フィードバック情報と前記交換情報とを取得する請求項2に記載の数値制御装置。
【請求項4】
前記交換情報は、前記工具の交換が完了したことを示す信号である請求項1~3のいずれか1項に記載の数値制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、工作機械の数値制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、数値制御装置では、サーボモータからのフィードバック情報を利用して、駆動軸の加速度および加加速度が原因で生じる工作機械の振動による加工面品質への影響を考慮した加工シミュレーションが行われている(特許文献1)。フィードバック情報を利用することにより、工作機械の実際の軸の動きを反映した加工シミュレーションを行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2020-71734号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、サーボモータから取得されるフィードバック情報には、工具交換に関する情報が含まれていない。そのため、フィードバック情報を利用した場合、工具交換のシミュレーションを含む加工シミュレーションを行うことができない。
【0005】
一方、加工プログラムに含まれる工具交換指令に基づいて工具交換のシミュレーションを行うことが考えられる。しかし、工具交換が指令されるタイミングと、実際に工作機械で工具交換が実行されるタイミングとの間には、ずれが生じる。そのため、フィードバック情報に基づいて行なわれるシミュレーションに工具交換のシミュレーションを、タイミングを合わせて組み入れることができない。
【0006】
本開示は、フィードバック情報に基づいて行なわれるシミュレーションに工具交換のシミュレーションを、タイミングを合わせて組み入れて加工シミュレーションを実行することが可能な数値制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
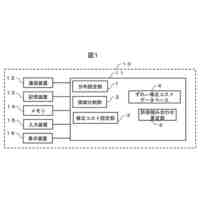
数値制御装置が、工具を特定する工具情報を含む加工プログラムを解釈して工作機械の軸を制御する制御部と、軸の位置を示すフィードバック情報を工作機械から取得するフィードバック情報取得部と、加工プログラムから工具情報を取得し、かつ、工具が交換されたことを示す交換情報を工作機械から取得する工具交換情報取得部と、フィードバック情報取得部によって取得されたフィードバック情報と、工具交換情報取得部によって取得された工具情報および交換情報とを合成して合成情報を生成する合成情報生成部と、工具の形状を示す形状情報を記憶する形状情報記憶部と、合成情報、および形状情報に基づいて、ワークの加工シミュレーションを実行する加工シミュレーション部と、加工シミュレーションを実行することによって生成された加工後のワークの形状を示す加工形状情報を出力する出力部と、を備える。
【発明の効果】
【0008】
本開示の一態様により、フィードバック情報に基づいて行なわれるシミュレーションに工具交換のシミュレーションを、タイミングを合わせて組み入れて加工シミュレーションを実行することが可能な数値制御装置を提供することを目的とする。
【図面の簡単な説明】
【0009】
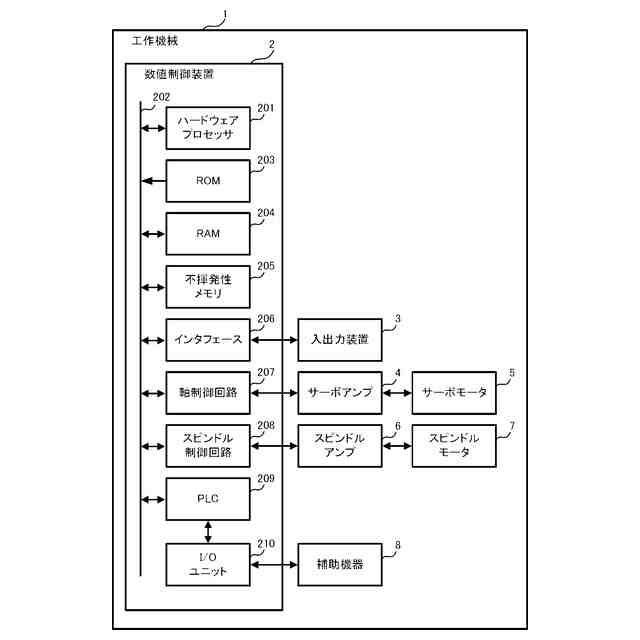
工作機械のハードウェア構成の一例を示すブロック図である。
数値制御装置の機能の一例を示す図である。
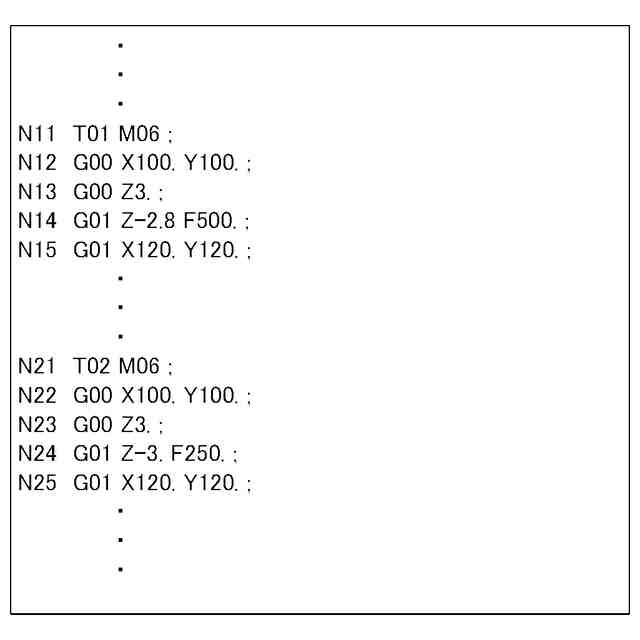
加工プログラムの一例を示す図である。
合成情報の一例を示す図である。
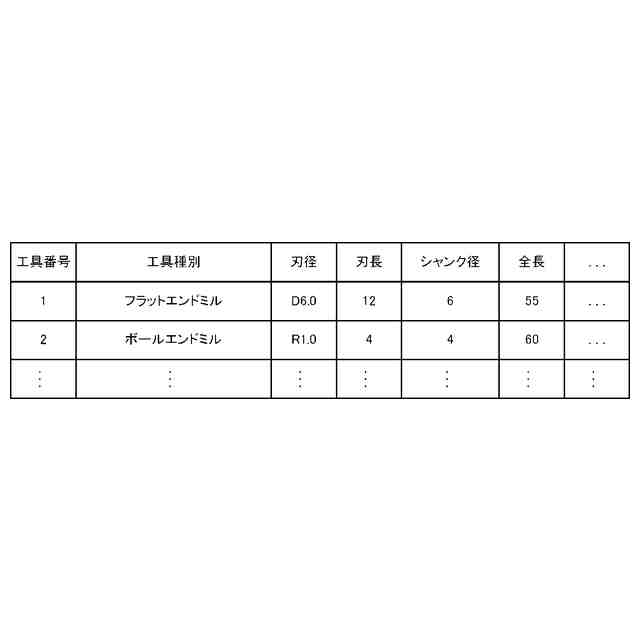
形状情報の一例を示す図である。
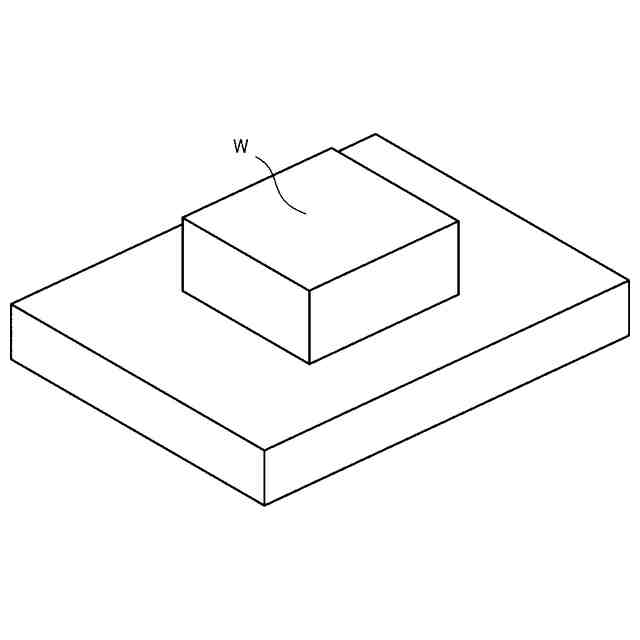
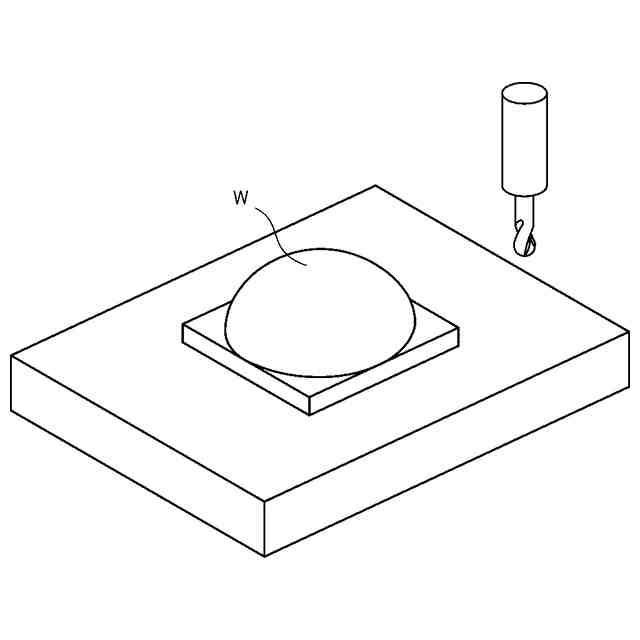
加工シミュレーションの一例を示す図である。
加工シミュレーションの一例を示す図である。
加工シミュレーションの一例を示す図である。
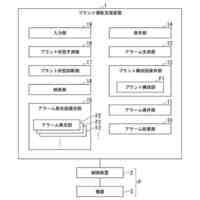
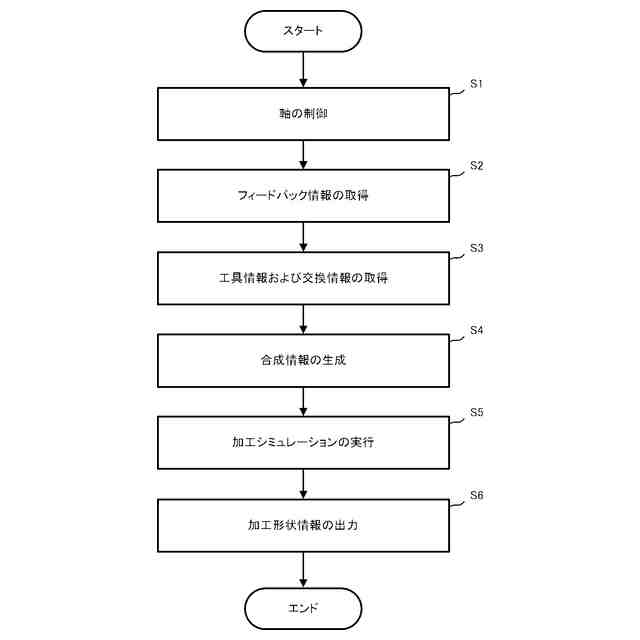
数値制御装置が実行する処理の流れの一例について説明する図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について図面を用いて説明する。なお、以下の実施形態で説明する特徴のすべての組み合わせが課題解決に必ずしも必要であるとは限らない。また、必要以上の詳細な説明を省略する場合がある。また、以下の実施形態の説明、および図面は、当業者が本開示を十分に理解するために提供されるものであり、請求の範囲を限定することを意図していない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
14日前
株式会社ダイヘン
移動体
19日前
ローム株式会社
半導体集積回路
29日前
株式会社ダイフク
搬送設備
14日前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社鷺宮製作所
制御装置
13日前
株式会社オプトン
制御プログラム生成装置
12日前
株式会社ダイフク
物品搬送設備
5日前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
28日前
株式会社ダイヘン
負荷時タップ切換器
19日前
株式会社戸張空調
アクセル・ブレーキ操作装置
25日前
オムロン株式会社
安全装置
12日前
シンフォニアテクノロジー株式会社
異常検知装置
12日前
株式会社ダイフク
飛行体制御システム
1日前
株式会社日立製作所
製造工程管理システム
13日前
株式会社FUJI
工作機械
15日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
29日前
株式会社大林組
作業機械の自動運転制御システム
28日前
株式会社豊田自動織機
無人搬送車両
22日前
横河電機株式会社
プラント運転支援装置
13日前
豊田鉄工株式会社
車両用操作ペダル
26日前
富士電機株式会社
制御装置、制御方法、及びプログラム
6日前
花王株式会社
制御方法及び製造装置
26日前
日清紡マイクロデバイス株式会社
基準電圧回路
15日前
日清紡マイクロデバイス株式会社
基準電圧回路
13日前
日清紡マイクロデバイス株式会社
基準電圧回路
15日前
日清紡マイクロデバイス株式会社
基準電圧回路
15日前
京セラドキュメントソリューションズ株式会社
移動体制御システム
5日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
22日前
富士電機株式会社
運転支援装置、運転支援方法及びプログラム
27日前
ものレボ株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
矢崎総業株式会社
移動体制御装置及び移動体制御システム
1か月前
日本電気株式会社
移動制御システム、移動制御方法、及び移動制御プログラム
12日前
トヨタ自動車株式会社
キャリブレーション装置及びそれを備えた搬送ロボット
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ