TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100437
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2024219763
出願日
2024-12-16
発明の名称
昇降装置、ウェハ―搬送ロボット及びウェハ―搬送システム
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
H01L
21/677 20060101AFI20250626BHJP(基本的電気素子)
要約
【課題】小型且つ単純な構成で安定した長ストローク化が可能な昇降装置を実現する。
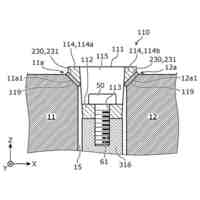
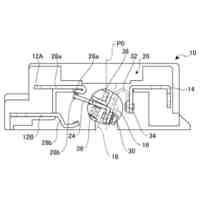
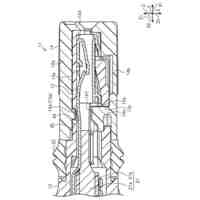
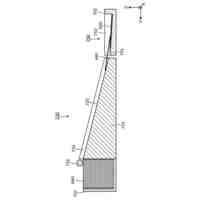
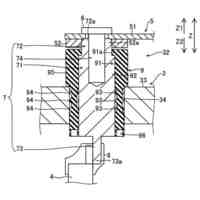
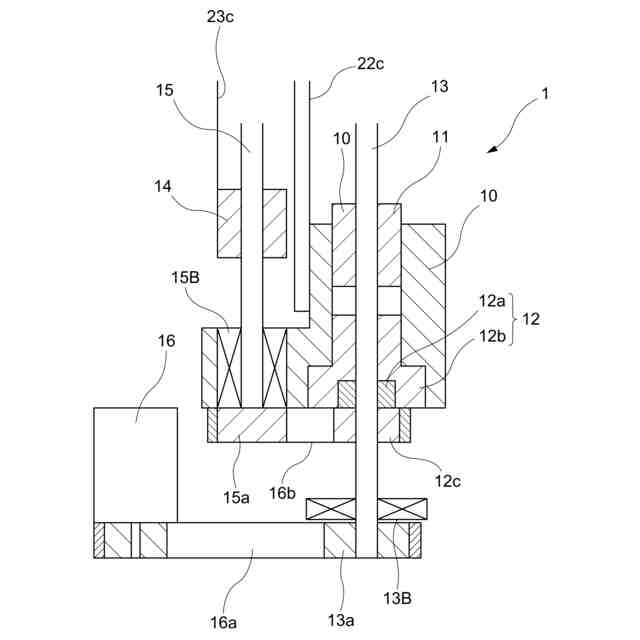
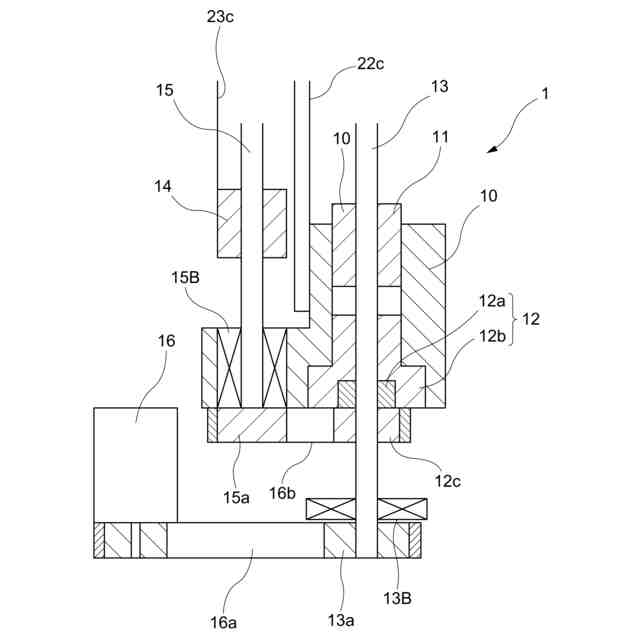
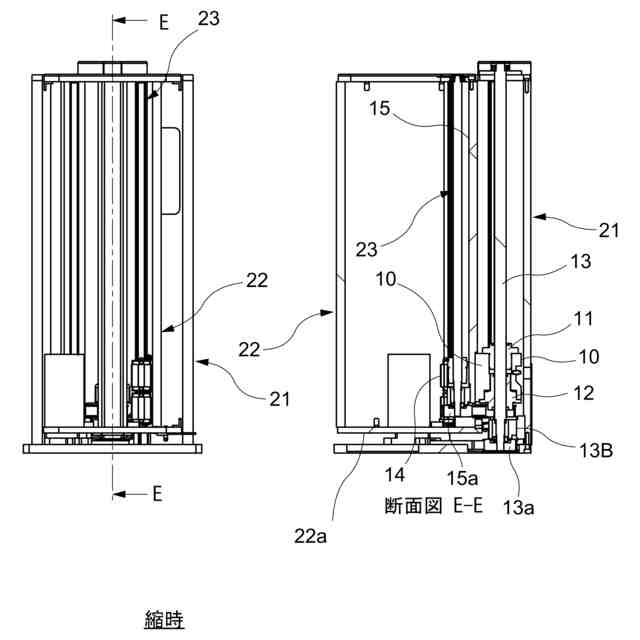
【解決手段】第1のボールねじナット11とスプラインナット12が係合されたボールねじスプライン軸13と、第2のボールねじナット14が係合されてボールねじスプライン軸13に併設されたボールねじ軸15と、ボールねじスプライン軸13を回転駆動するモータ16とを備え、第1のボールねじナット11はボールねじスプライン軸13にねじ送りされて昇降し、スプラインナット12は外輪12bが第1のボールねじナット11と一体となって昇降するとともに内輪12aがボールねじスプライン軸13と共に回転し、ボールねじ軸15はスプラインナット12の外輪12bと一体となって昇降するとともにスプラインナット12の内輪12aの回転を受けて回転し、第2のボールねじナット14はボールねじ軸15にねじ送りされて昇降するように構成した。
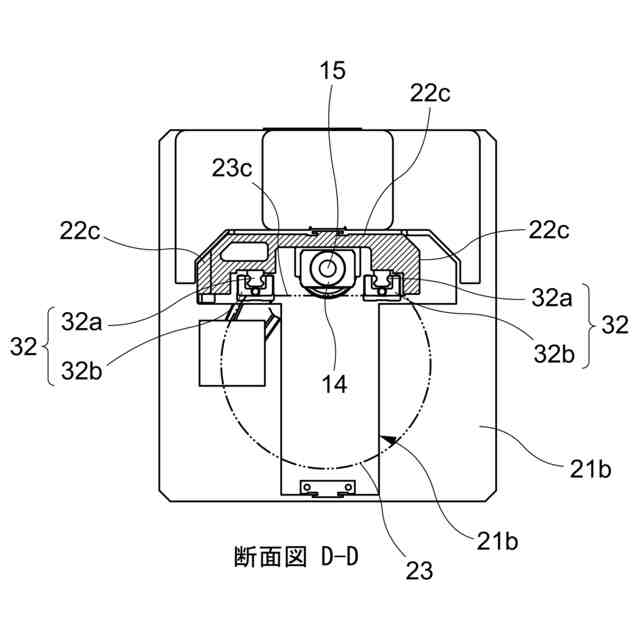
【選択図】図4
特許請求の範囲
【請求項1】
第1のボールねじナットとスプラインナットが係合されたボールねじスプライン軸と、第2のボールねじナットが係合されて前記ボールねじスプライン軸に併設されたボールねじ軸と、前記ボールねじスプライン軸を回転駆動するモータとを備え、
前記第1のボールねじナットは前記ボールねじスプライン軸にねじ送りされて昇降し、
前記スプラインナットは外輪が前記第1のボールねじナットと一体となって昇降するとともに内輪が前記ボールねじスプライン軸と共に回転し、
前記ボールねじ軸は前記スプラインナットの外輪と一体となって昇降するとともに当該スプラインナットの内輪の回転を受けて回転し、
前記第2のボールねじナットは前記ボールねじ軸にねじ送りされて昇降する、
ことを特徴とする、昇降装置。
続きを表示(約 680 文字)
【請求項2】
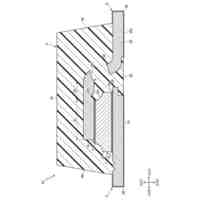
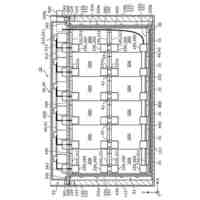
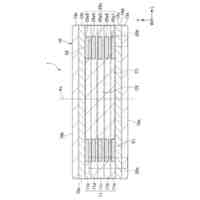
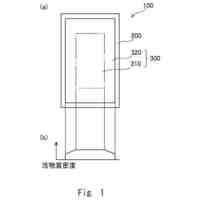
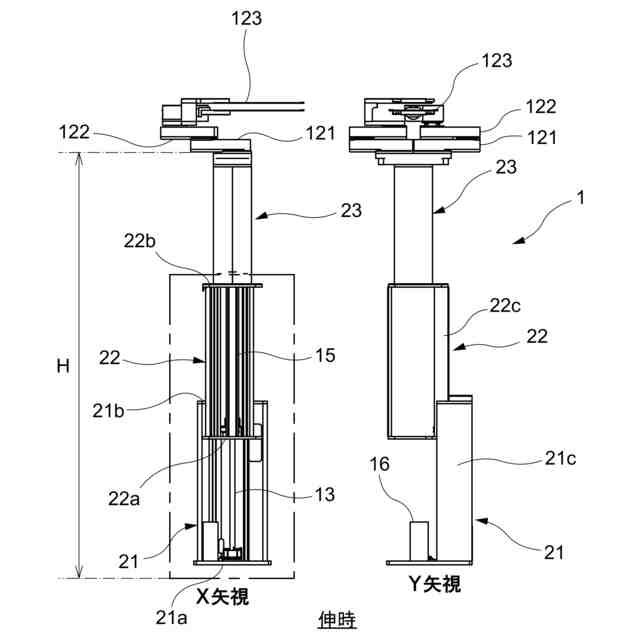
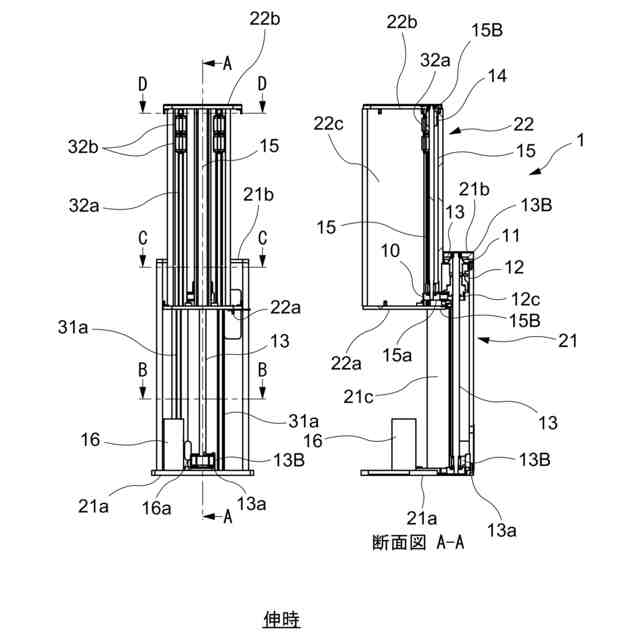
前記ボールねじスプライン軸を基礎筐体に取り付け、前記第1のボールねじナット、前記スプラインナット、及び前記ボールねじ軸と一体に昇降するように第1の可動筐体を取り付け、前記第2のボールねじナットと一体に昇降するように第2の可動筐体を取り付けており、前記第2の可動筐体は側壁の内側に中空部を有する構造であり、前記ボールねじスプライン軸及び前記ボールねじ軸は前記中空部の外に配置されている、請求項1に記載の昇降装置。
【請求項3】
前記基礎筐体と前記第1の可動筐体のあいだに第1リニアガイドを設け、前記第1の可動筐体と前記第2の可動筐体のあいだに第2リニアガイドを設けている、請求項2に記載の昇降装置。
【請求項4】
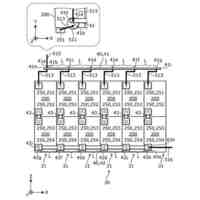
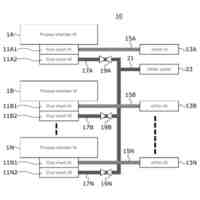
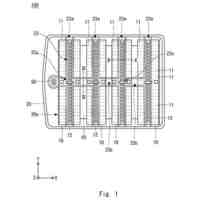
前記第1ボールねじナット及び前記スプリングナットを備えた前記ボールねじスプライン軸を、前記第2ボールねじナットを備えた前記ボールねじ軸の前に複数段併設し、当該複数段のボールねじスプライン軸間においても更にテレスコピック動作をさせるようにしている、請求項2に記載の昇降装置。
【請求項5】
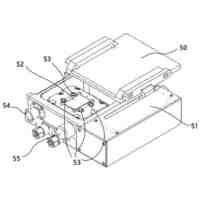
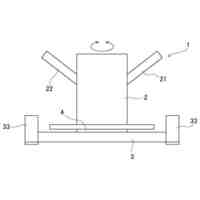
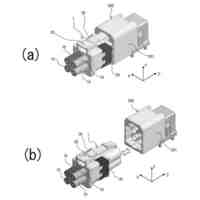
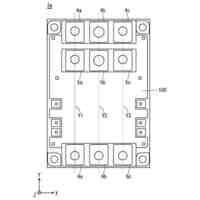
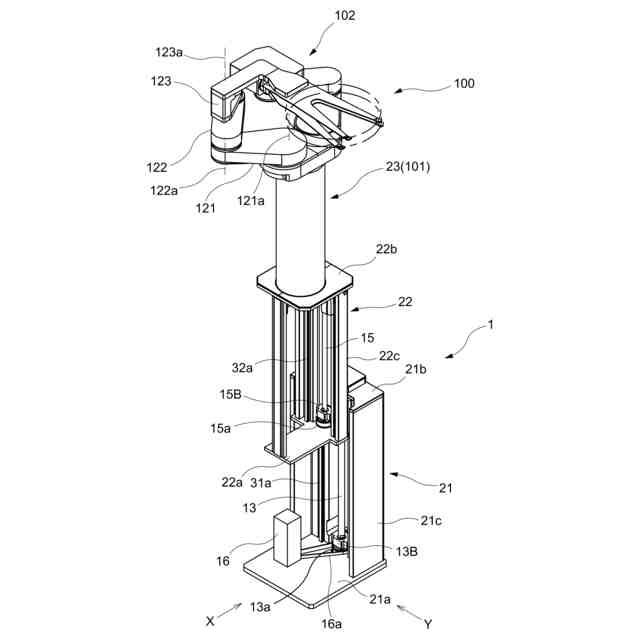
請求項2~4に記載の昇降装置を利用し、前記第2の可動筐体を前記第1の可動筐体に対して旋回可能とし、旋回軸モータを前記第2の可動筐体の外に配置し、前記第2の可動筐体の上にアーム機構を取り付けたことを特徴とする、ウェハ―搬送ロボット。
【請求項6】
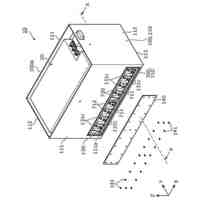
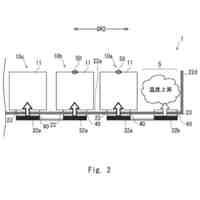
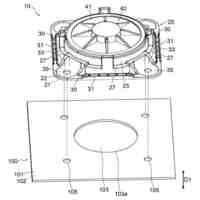
請求項5に記載のウェハ―搬送ロボットを、搬送室内に設けたレールに沿って走行させるように構成したことを特徴とする、ウェハ―搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、小型且つ単純な構成で長ストローク化を実現した、昇降装置、ウェハ―搬送ロボット及びウェハ―搬送システムに関するものである。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
この種のウェハ―搬送ロボットは、EFEM(Equipment Front End Module)等の搬送室内に配置され、レールに沿った走行移動や、ロボットハンドの伸縮動作、昇降動作等によって必要な可動域をカバーしている。ロボットを昇降させる昇降機構には、一般にボールねじ機構が採用される。
【0003】
ところで、近年になって、ウェハ―搬送ロボットのZ軸方向の長ストローク化及び小型化が要求されている。しかしながら、単純なボールねじ機構では、ロボットのストロークを伸ばしたくても、ロボット自体の全長を伸ばさない限り、単純にボールねじ長さを伸ばすことはできない。
【0004】
このような課題を解決するために、例えば特許文献1、2に示すものが利用可能なものとして考えられる。
【0005】
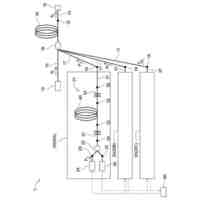
いずれの文献も、プーリーと昇降ベルトを使って、テレスコピック構造を実現している。具体的には、1段目と3段目の筐体を昇降ベルトで繋ぎ、2段目の筐体にプーリーを取り付けて動滑車の役割を担わせている。
【0006】
この状態で、ボールねじ昇降などにより、1段目に対して2段目が昇降した場合に、昇降ベルトによって同時に3段目も昇降させることができ、ストロークを倍増させることが可能である。
【先行技術文献】
【特許文献】
【0007】
特開2004-343140
特開2000-117670
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、何れのテレスコピック機構も、滑車やワイヤを巻き掛ける構造やスペースが必要になるうえに、筐体の内空を広く確保する必要がある。このため、機構が複雑になり、機構全体が大型化する問題がある。しかも、昇降ベルト構造だと剛性が低く、振動が生じ易いうえに、ベルト破断等も起こり易いため、長期に亘って正確な動作を行わせることが困難になるという問題がある。
【0009】
本発明は、このような課題に着目してなされたものであって、小型且つ単純な構成で安定した長ストローク化が可能な、昇降装置、ウェハ―搬送ロボット及びウェハ―搬送システムを実現することを目的としている。
【課題を解決するための手段】
【0010】
本発明は、かかる目的を達成するために、次のような手段を講じたものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
APB株式会社
二次電池
23日前
日東精工株式会社
端子部品
17日前
レナタ・アーゲー
電池
12日前
個人
鉄心用材料とその製造方法
2日前
株式会社クオルテック
空気電池
9日前
株式会社メルビル
ステージ
4日前
ローム株式会社
半導体装置
24日前
株式会社GSユアサ
蓄電装置
2日前
株式会社GSユアサ
蓄電装置
2日前
株式会社GSユアサ
蓄電装置
18日前
株式会社GSユアサ
蓄電装置
2日前
豊田鉄工株式会社
コイル部品
11日前
三菱電機株式会社
漏電遮断器
16日前
三洲電線株式会社
撚線
16日前
株式会社GSユアサ
蓄電装置
2日前
株式会社GSユアサ
蓄電装置
2日前
太陽誘電株式会社
コイル部品
24日前
株式会社村田製作所
電池
24日前
トヨタ自動車株式会社
二次電池
25日前
株式会社高田製作所
電源切替器
24日前
中国電力株式会社
移動用変圧器
11日前
トヨタ自動車株式会社
電池パック
19日前
住友電装株式会社
コネクタ
2日前
エドワーズ株式会社
冷却システム
2日前
住友電装株式会社
コネクタ
2日前
株式会社不二越
ソレノイド
29日前
株式会社GSユアサ
極板積層装置
18日前
矢崎総業株式会社
コネクタ
25日前
トヨタ自動車株式会社
電池パック
17日前
三菱電機株式会社
半導体装置
12日前
株式会社村田製作所
二次電池
2日前
株式会社ニフコ
構造体
23日前
三菱電機株式会社
半導体装置
10日前
トヨタ自動車株式会社
電極及び電池
10日前
株式会社アイシン
回転電機駆動装置
3日前
株式会社フジクラ
ファイバレーザ装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ