TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097216
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213382
出願日
2023-12-18
発明の名称
自動ラベリング方法及び自動ラベリング装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20250623BHJP(信号)
要約
【課題】物体の灯火に対して精度よくラベリングすることができる自動ラベリング方法を提供する。
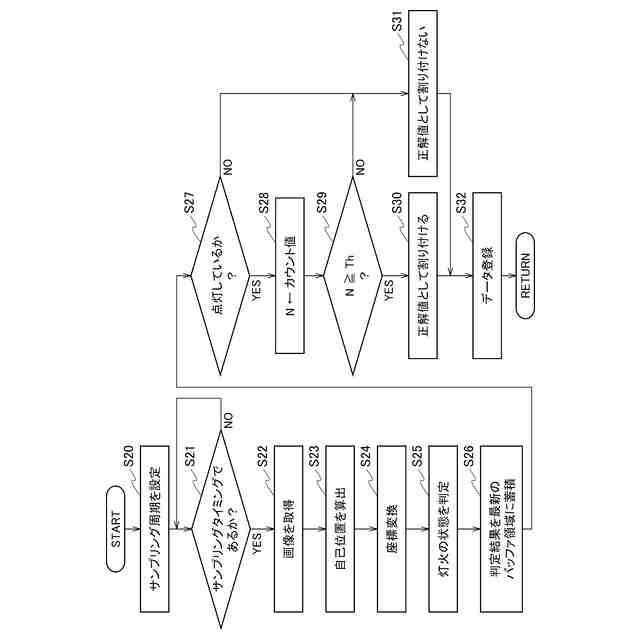
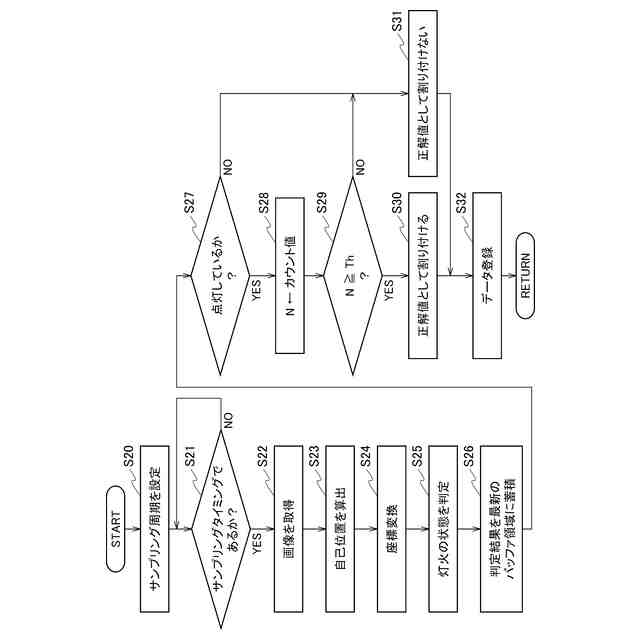
【解決手段】自動ラベリング方法は、カメラ5から画像を取得し、画像において灯火51の状態を判定し、バッファ領域に判定結果を入力し、最新の判定結果が点灯であり、且つ点灯と判定された判定結果の回数が閾値以上となる場合に、最新の判定結果が得られた画像の灯火を正解値としてラベリングする、ことを含む。バッファ領域に判定結果を入力する工程は、所定のサンプリング周期で実行され、サンプリング周期は、灯火の種類、及び物体に対する車両の位置の少なくとも一つに基づいて決定される。
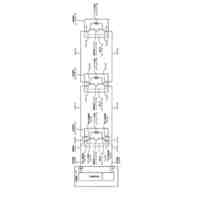
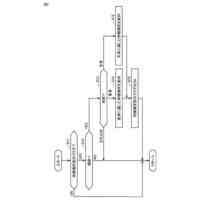
【選択図】図3
特許請求の範囲
【請求項1】
車両に搭載された撮像装置によって撮像された画像に基づいて物体の灯火をラベリングする自動ラベリング装置によって実行される自動ラベリング方法であって、
前記撮像装置から前記画像を取得し、
前記画像において前記灯火の状態を判定し、
所定回数分の判定結果を記憶可能な容量を備えるバッファ領域に前記判定結果を入力し、
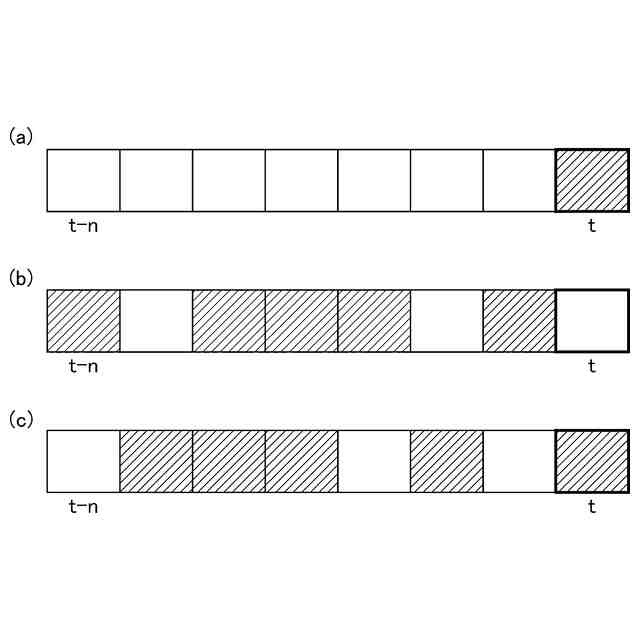
前記バッファ領域に記憶された前記所定回数分の前記判定結果のうち、最新の判定結果が点灯であり、前記点灯と判定された前記判定結果の回数が閾値以上となる場合に、前記最新の判定結果が得られた前記画像の前記灯火を正解値としてラベリングする、ことを含み、
前記バッファ領域に前記判定結果を入力する処理は、所定のサンプリング周期で実行され、
前記サンプリング周期は、前記灯火の種類、及び前記物体に対する前記車両の位置の少なくとも一つに基づいて決定される
自動ラベリング方法。
続きを表示(約 910 文字)
【請求項2】
前記サンプリング周期は、前記灯火の種類、前記物体に対する前記車両の位置、及び前記車両の速度の少なくとも一つに基づいて決定される
請求項1記載の自動ラベリング方法。
【請求項3】
前記物体は複数の灯火を備え、
前記バッファ領域に前記判定結果を入力する処理は、前記灯火毎に実行される
請求項1記載の自動ラベリング方法。
【請求項4】
前記灯火の位置を取得し、
前記車両の位置を算出し、
前記物体の位置と前記車両の位置とに基づいて座標変換を行うことで、前記画像における前記灯火の位置を特定すること、をさらに含む
請求項1記載の自動ラベリング方法。
【請求項5】
前記物体は、前記灯火の状態が所定の周期で切り替わる信号機である
請求項1記載の自動ラベリング方法。
【請求項6】
前記サンプリング周期は、前記撮像装置による前記画像の撮像周期以上である
請求項1記載の自動ラベリング方法。
【請求項7】
前記車両の挙動を示す状態量が判定値以上の場合は、前記最新の判定結果が得られた前記画像の前記灯火を正解値としてラベリングしない
請求項1記載の自動ラベリング方法。
【請求項8】
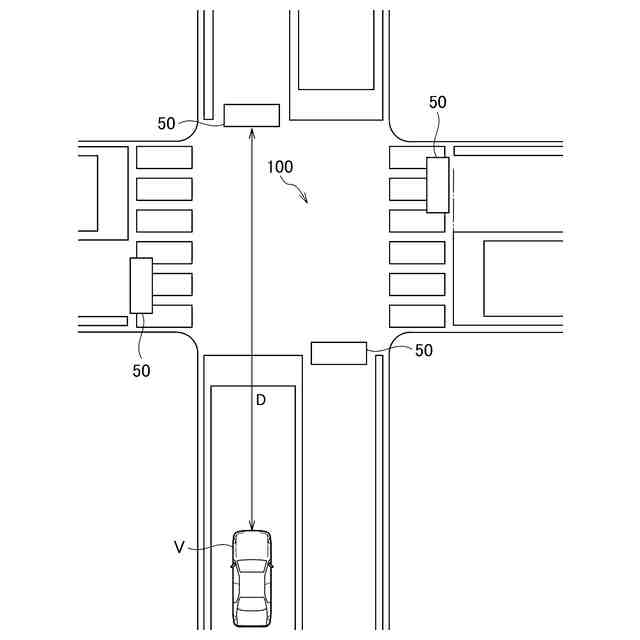
前記車両から前記物体までの距離が判定値以上の場合は、前記最新の判定結果が得られた前記画像の前記灯火を正解値としてラベリングしない
請求項1記載の自動ラベリング方法。
【請求項9】
前記正解値がラベリングされた学習データを含む、機械学習用のデータセットによって機械学習された学習モデルを用いて前記物体を認識し、
前記物体の認識結果を、前記車両の走行制御を行う装置に出力する
請求項1記載の自動ラベリング方法。
【請求項10】
前記機械学習用のデータセットには、前記車両以外の他の車両によって収集された学習データが含まれる
請求項9記載の自動ラベリング方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動ラベリング方法及び自動ラベリング装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、教師あり機械学習のための画像の自動ラベリング方法が開示されている。自動ラベリング方法は、車両に取り付けられたカメラを用いて路傍物体の画像を取得するステップと、画像を取得する間に、定義された座標系内で車両の位置及び向きを記録するステップとを含む。自動ラベリング方法は、定義された座標系を用いて各路傍物体に関する位置情報を記録するステップと、路傍物体の各画像の位置を、車両の記録された位置及び向きを考慮して各路傍物体の位置情報と相関付けするステップと、をさらに含む。これらの画像は、路傍物体の取得された各画像の相関位置を考慮して、路傍物体を識別するためにラベリングされる。
【先行技術文献】
【特許文献】
【0003】
特表2022-514891号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のラベリング方法は、時間の経過とともに状態が遷移する物体の灯火に対して精度よくラベリングすることができない可能性があった。
【0005】
本発明は、上記課題に鑑みて成されたものであり、その目的は、物体の灯火に対して精度よくラベリングすることである。
【課題を解決するための手段】
【0006】
本発明の一態様に係わる自動ラベリング方法は、撮像装置から画像を取得し、画像において灯火の状態を判定し、バッファ領域に判定結果を入力し、最新の判定結果が点灯であり、且つ点灯と判定された判定結果の回数が閾値以上となる場合に、最新の判定結果が得られた画像の灯火を正解値としてラベリングする、ことを含む。バッファ領域に判定結果を入力する処理は、所定のサンプリング周期で実行され、サンプリング周期は、灯火の種類、及び物体に対する車両の位置の少なくとも一つに基づいて決定される。
【発明の効果】
【0007】
本発明によれば、物体の灯火に対して精度よくラベリングすることができる。
【図面の簡単な説明】
【0008】
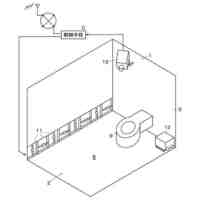
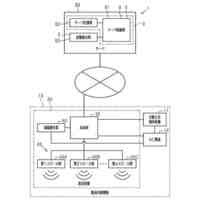
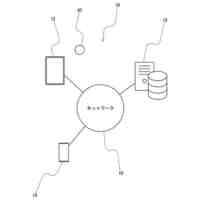
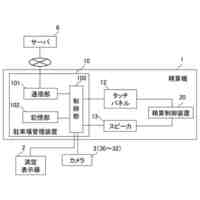
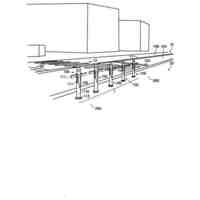
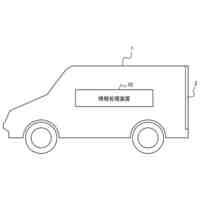
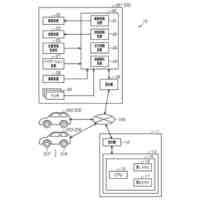
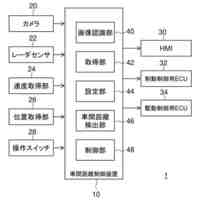
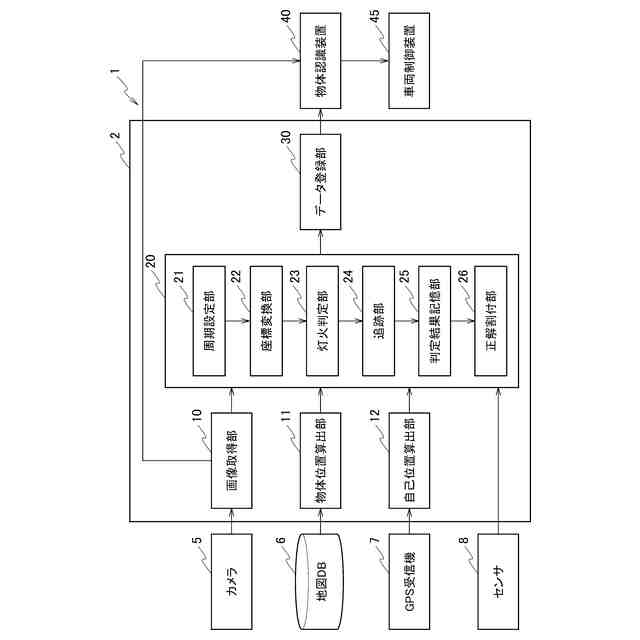
図1は、自動ラベリング装置を含む車両システムの全体構成を説明する図である。
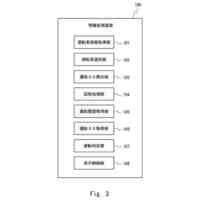
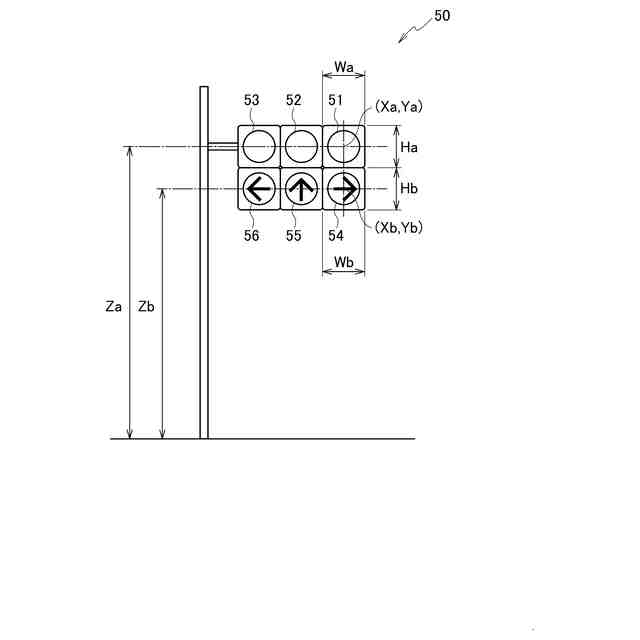
図2は、高精度地図データに含まれる信号機の情報を説明する図である。
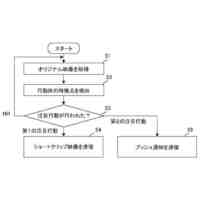
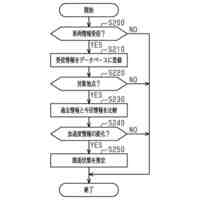
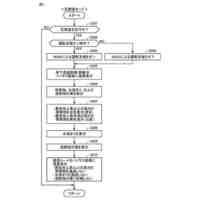
図3は、自動ラベリング装置によって実行される自動ラベリング方法の処理の流れを示す図である。
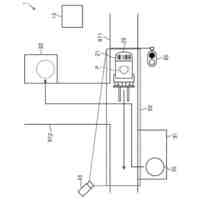
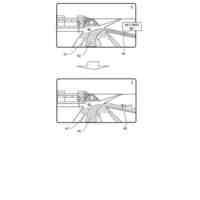
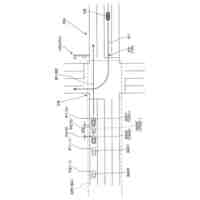
図4は、信号機が設置された交差点を説明する図である。
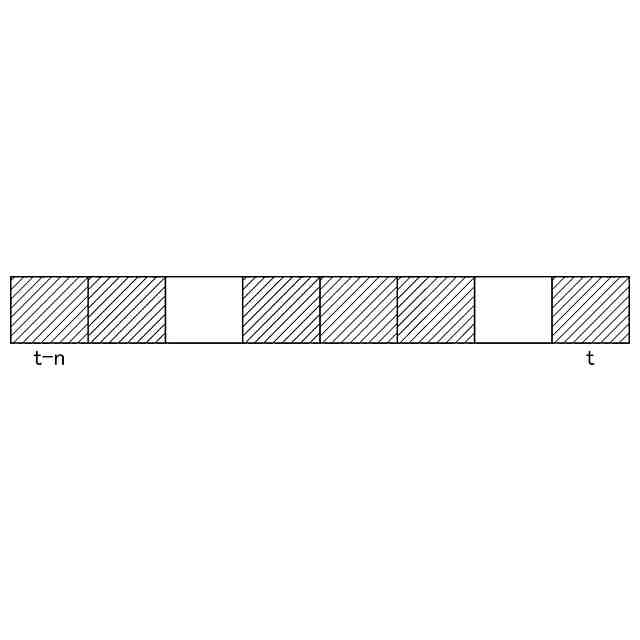
図5は、バッファ領域である判定結果記憶部の概念を示す図である。
図6は、判定結果記憶部に記憶される判定結果を例示する図である。
【発明を実施するための形態】
【0009】
図面を参照して、本実施形態を説明する。図面の記載において同一部分には同一符号を付して説明を省略する。
【0010】
図1を参照して、本実施形態に係る自動ラベリング装置2を説明する。自動ラベリング装置2は、車両に搭載される車両システム1の一部を構成している。車両は、自動運転機能を有する車両であるが、自動運転機能を有しない車両でもよい。また、車両は、自動運転機能と手動運転機能とを切り替えることができる車両でもよい。自動運転機能は、操舵制御機能、制動力制御機能、駆動力制御機能などの複数の車両制御機能を自動的に制御して自律的に運転を行う機能であるが、複数の車両制御機能のうちの一部の機能のみを自動的に制御して運転者の運転を支援する機能であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
5日前
個人
防犯に特化したアプリケーション
13日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
今日
ニッタン株式会社
発信機
11日前
東京都公立大学法人
液滴検出装置
13日前
TOA株式会社
拡声放送システム
4日前
アズビル株式会社
建物管理システム
1か月前
株式会社アジラ
データ転送システム
4日前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
情報処理装置
26日前
株式会社豊田自動織機
制御システム
4日前
株式会社フィットネスワン
見守りシステム
1か月前
ホーチキ株式会社
非常通報システム
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
トヨタ自動車株式会社
障害物検知装置
20日前
Adora株式会社
アプリ使用制御システム
1か月前
シャープ株式会社
駐車場管理装置
1か月前
能美防災株式会社
火災感知器窓部清掃システム
18日前
個人
注意喚起システム及び注意喚起装置
4日前
トヨタ自動車株式会社
路面状態の推定方法
4日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
情報処理装置
11日前
株式会社アドヴィックス
走行支援システム
1か月前
株式会社エイビット
工事観測システム
1か月前
ホシデン株式会社
センサ装置システム
19日前
株式会社アイシン
重畳画像表示装置
1か月前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
19日前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
19日前
株式会社アイシン
重畳画像表示装置
1か月前
トヨタ自動車株式会社
車間距離制御装置
1か月前
能美防災株式会社
煙感知器
1か月前
日本信号株式会社
情報提供システム及び情報提供方法
1か月前
株式会社SUBARU
車両
5日前
トヨタ自動車株式会社
情報機器
1か月前
株式会社京三製作所
交通信号制御機保守システム
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ