TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095095
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210903
出願日
2023-12-14
発明の名称
位置推定装置、車両、自車両位置推定方法およびコンピュータプログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
B60R
99/00 20090101AFI20250619BHJP(車両一般)
要約
【課題】低照度環境下における後退動作時の駐車支援のために撮像画像から特徴点を精度良く検出する。
【解決手段】車両10、10aの後退動作時における自車両位置を推定する位置推定装置100、100aは、後退動作を検出する後退検出部111と、後退動作が検出された場合に光源装置400、800に対し、近赤外光を車両の後方に照射するように指示する照射指示部112と、近赤外光が照射された状態において撮像装置300が車両の後方を撮影することにより得られる撮像画像を取得する画像取得部113と、取得された撮像画像に基づき、輝度情報に基づく特徴点抽出装置またはアルゴリズムを利用して特徴点を検出し、検出された特徴点を利用して自車両位置を推定する位置推定部114と、を備える。
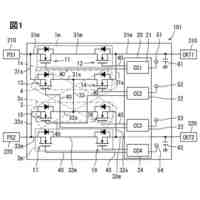
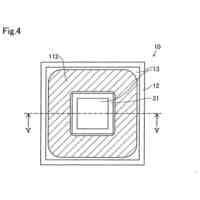
【選択図】図1
特許請求の範囲
【請求項1】
車両(10、10a)の後退動作時における前記車両の位置である自車両位置を推定する位置推定装置(100、100a)であって、
前記車両の後退動作を検出する後退検出部(111)と、
前記後退動作が検出された場合に、近赤外光を照射可能な光源を有して前記車両の後方を照射可能な光源装置(400、800)に対し、前記近赤外光を前記車両の後方に照射するように指示する照射指示部(112)と、
前記近赤外光が照射された状態において前記車両が有する撮像装置(300)が前記車両の後方を撮影することにより得られる撮像画像を取得する画像取得部(113)と、
取得された前記撮像画像に基づき、輝度情報に基づく特徴点抽出装置またはアルゴリズムを利用して特徴点を検出し、検出された前記特徴点を利用して前記自車両位置を推定する位置推定部(114)と、
を備える、位置推定装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の位置推定装置において、
前記特徴点抽出装置またはアルゴリズムは、前記車両の前記後退動作時の進行方向および前記車両の周辺を前記撮像画像が撮像することにより得られる撮像画像を元に、画素単位で輝度を予め定められた閾値輝度と比較し、その差分情報から前記特徴点を検出する、位置推定装置。
【請求項3】
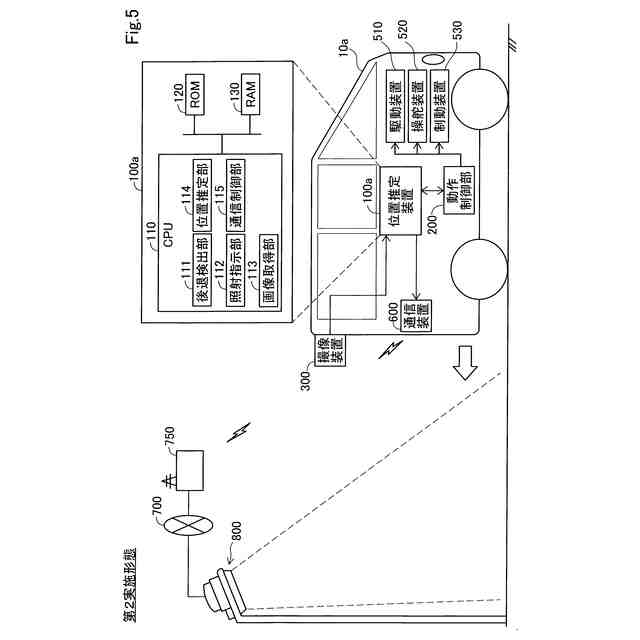
請求項1に記載の位置推定装置(100a)において、
前記光源装置(800)は、前記車両とは別の地物であって前記後退動作が行われる領域の周囲の地物に設けられており、
前記位置推定装置は、前記車両が有する通信装置(600)を介して、前記光源装置と通信を行うための通信制御部(115)をさらに備え、
前記照射指示部は、前記後退動作が検出された場合に、前記通信制御部による前記光源装置との通信を利用して、前記近赤外光を前記車両の後方に照射するように前記光源装置に指示する、位置推定装置。
【請求項4】
車両(10、10a)であって、
請求項1から請求項3までのいずれか一項に記載の位置推定装置(100、100a)と、
前記位置推定装置により推定された前記自車両位置を利用して、前記車両における前記後退動作を含む駐車動作を制御する動作制御部(200)と、
を備える、車両。
【請求項5】
車両の後退動作時における前記車両の位置である自車両位置を推定するための自車両位置推定方法であって、
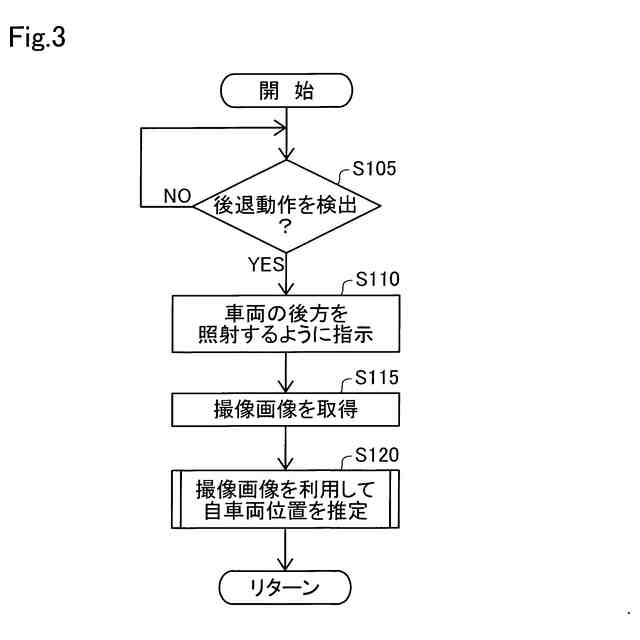
前記車両の後退動作を検出する工程(S105)と、
前記後退動作が検出された場合に、近赤外光を照射可能な光源を有して前記車両の後方を照射可能な光源装置に対し、前記近赤外光を前記車両の後方に照射するように指示する工程(S110)と、
前記光が照射された状態において前記車両が有する撮像装置が前記車両の後方を撮影することにより得られる撮像画像を取得する工程(S115)と、
取得された前記撮像画像に基づき、輝度情報に基づく特徴点抽出装置またはアルゴリズムを利用して特徴点を検出し、検出された前記特徴点を利用して前記自車両位置を推定する工程(S120)と、
を備える、自車両位置推定方法。
【請求項6】
車両の後退動作時における前記車両の位置である自車両位置を推定するためのコンピュータプログラムであって、
前記車両の後退動作を検出する機能と、
前記後退動作が検出された場合に、近赤外光を照射可能な光源を有して前記車両の後方を照射可能な光源装置に対し、前記近赤外光を前記車両の後方に照射するように指示する機能と、
前記光が照射された状態において前記車両が有する撮像装置が前記車両の後方を撮影することにより得られる撮像画像を取得する機能と、
取得された前記撮像画像に基づき、輝度情報に基づく特徴点抽出アルゴリズムを利用して特徴点を検出し、検出された前記特徴点を利用して前記自車両位置を推定する機能と、
をコンピュータに実現させるためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定装置、車両、自車両位置推定方法およびコンピュータプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
車両の後退動作時における駐車支援のための技術として、車両搭載のカメラにより得られる撮像画像を利用して自車両位置を推定する技術が種々提案されている。そのような技術の1つとして、FAST(Features from Accelerated Segment Test)などの輝度に基づく特徴点抽出アルゴリズムを利用して撮像画像内における特徴点を検出し、かかる特徴点の経時変化から自車両位置の変化を推定し、さらに、かかる自己位置の変化を利用して自車両位置を推定する方法が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-126711号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、夜間などの環境光の照度が低い低照度環境下においては、環境光とノイズとの差が小さいために特徴点を精度良く検出することが困難である。その結果、自己位置の推定精度が低下するという問題がある。そこで、低照度環境下における後退動作時の駐車支援のために、撮像画像から特徴点を精度良く検出可能な技術が望まれる。
【課題を解決するための手段】
【0005】
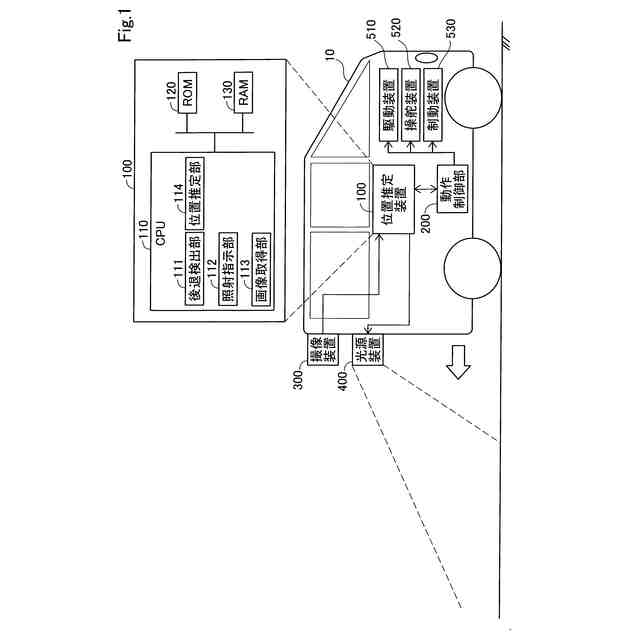
本開示の一形態として、車両(10、10a)の後退動作時における前記車両の位置である自車両位置を推定する位置推定装置(100、100a)が提供される。この位置推定装置は、前記車両の後退動作を検出する後退検出部(111)と、前記後退動作が検出された場合に、近赤外光を照射可能な光源を有して前記車両の後方を照射可能な光源装置(400、800)に対し、前記近赤外光を前記車両の後方に照射するように指示する照射指示部(112)と、前記近赤外光が照射された状態において前記車両が有する撮像装置(300)が前記車両の後方を撮影することにより得られる撮像画像を取得する画像取得部(113)と、取得された前記撮像画像に基づき、輝度情報に基づく特徴点抽出装置またはアルゴリズムを利用して特徴点を検出し、検出された前記特徴点を利用して前記自車両位置を推定する位置推定部(114)と、を備える。
【0006】
上記形態の位置推定装置によれば、後退動作が検出された場合に近赤外光が車両の後方に照射され、また、近赤外光が照射された状態において撮像することにより得られる撮像画像に基づき特徴点が検出されるので、環境光の照度が低い低照度環境下であっても、近赤外光により車両の後方の照度を増加させることができる。したがって、環境光とノイズとの差を増大することができ、低照度環境下における後退動作時の駐車支援のために、撮像画像から特徴点を精度良く検出できる。
【0007】
本開示は、種々の形態で実現することも可能である。例えば、車両、自車両位置推定方法、位置推定装置や自車両位置推定方法を実現するためのコンピュータプログラム、かかるコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0008】
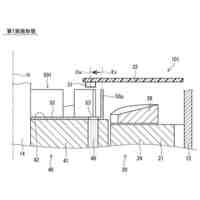
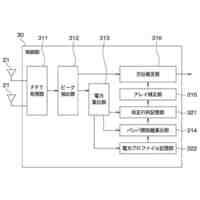
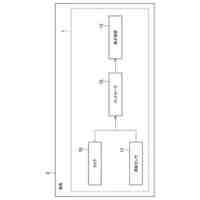
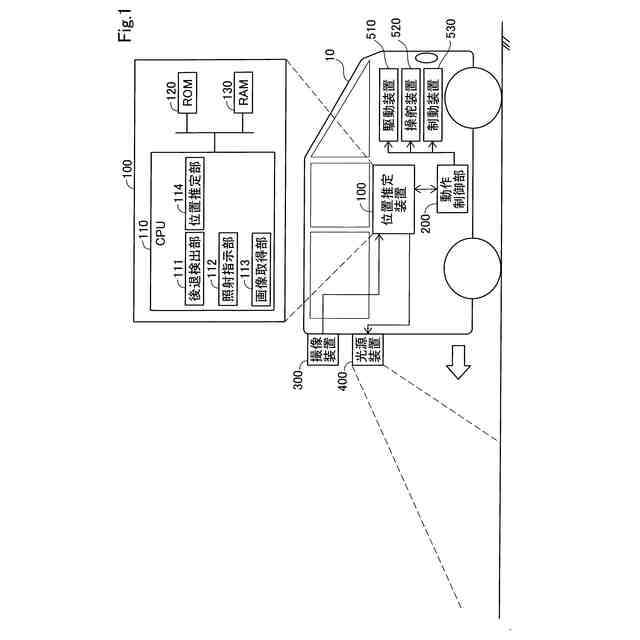
本開示の一実施形態としての車両位置推定装置を適用した車両の概略構成を示すブロック図である。
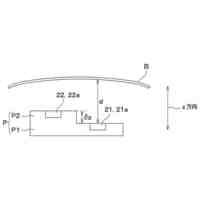
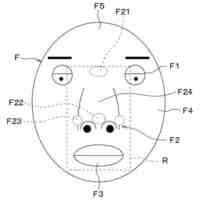
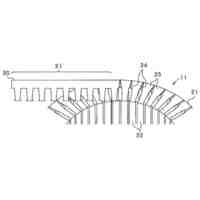
FASTにおける特徴点検出方法を説明するための説明図である。
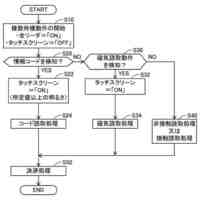
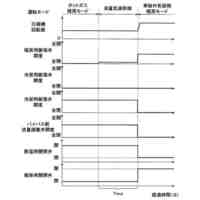
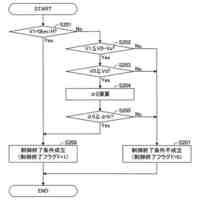
第1実施形態における自車両位置推定処理の手順を示すフローチャートである。
自車両位置推定の詳細手順を示すフローチャートである。
第2実施形態の位置推定装置を適用した車両の概略構成を示すブロック図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A1.装置構成:
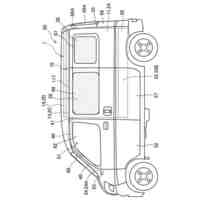
図1に示す位置推定装置100は、車両10に搭載されて用いられる。まず、車両10の構成について説明する。車両10は、車輪により走行する移動体であり、ガソリンエンジンを備える車両、電気自動車(BEV:Battery Electric Vehicle)、ハイブリッド車両、燃料電池車両など、任意の種類の移動体であってよい。車両10は、運転モードとして、手動運転と自動運転とを備える。手動運転とは、車両10の運転者がハンドル、アクセルペダル、ブレーキペダル等を操作して車両10を運転する運転モードである。自動運転とは、車両10の加減速、操舵、制動の少なくとも1つを運転者の指示によらずに自律的に制御する運転モードである。本実施形態では、後退して駐車を行う動作(以下、「後退駐車動作」と呼ぶ)を行う際に、自動運転が実行される。本実施形態では、手動運転と自動運転との切り替えは、図示しない物理的な操作ボタンの押下、或いは、図示しない操作ディスプレイに表示されるメニュー画面上での操作ボタンの押下といった予め定められた操作が運転者によって実行された場合に行われる。
【0010】
車両10は、後ほど詳述する位置推定装置100の他に、動作制御部200、撮像装置300、光源装置400、駆動装置510、操舵装置520、制動装置530を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電気装置
12日前
株式会社デンソー
受電装置
4日前
株式会社デンソー
検出装置
3日前
株式会社デンソー
熱交換器
6日前
株式会社デンソーウェーブ
決済端末
5日前
株式会社デンソー
電流センサ
10日前
株式会社デンソー
圧電センサ
5日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
半導体装置
3日前
株式会社デンソーウェーブ
情報読取装置
3日前
株式会社デンソー
電源切替回路
10日前
株式会社デンソー
差動通信回路
11日前
株式会社デンソー
電子制御装置
10日前
株式会社デンソー
状態推定装置
10日前
株式会社デンソー
燃料噴射装置
4日前
株式会社デンソー
コイルユニット
10日前
株式会社デンソー
データ処理装置
4日前
株式会社デンソー
圧縮機モジュール
11日前
株式会社デンソー
ブラシレスモータ
6日前
株式会社デンソー
マイクロホン装置
11日前
株式会社デンソー
回転電機のステータコア
11日前
株式会社デンソーウェーブ
携帯端末及び管理システム
6日前
株式会社デンソー
ヒートポンプサイクル装置
11日前
株式会社デンソー
慣性センサおよびその製造方法
11日前
株式会社デンソー
方位推定装置および方位推定方法
3日前
ダイハツ工業株式会社
恒温装置
10日前
トヨタ自動車株式会社
判定装置
5日前
トヨタ自動車株式会社
車両制御装置
6日前
株式会社デンソー
半導体装置及び半導体装置の製造方法
10日前
トヨタ自動車株式会社
映像表示装置
6日前
株式会社デンソー
デルタシグマA/D変換器及び電池監視装置
5日前
株式会社デンソーテン
治具、アライメント装置、および端子挿入方法
11日前
株式会社デンソーテン
提供装置、搬送ロボット、及び物品搬送システム
4日前
トヨタ自動車株式会社
運転支援システムの制御装置
10日前
株式会社デンソー
データ保存装置、移動体、及びデータ保存プログラム
6日前
株式会社デンソー
位置推定装置、車両、自車両位置推定方法およびコンピュータプログラム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ