TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071836
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182201
出願日
2023-10-24
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/08 20200101AFI20250430BHJP(車両一般)
要約
【課題】利用者の嗜好と合わない自動走行制御が実行される可能性を低減し、利用者が自動走行制御に対して違和感を抱く可能性を低減する。
【解決手段】運転支援装置は、車両の外部環境に関する環境情報を取得するセンサと、手動運転中に行われた手動操作による車両の挙動を学習済挙動として記憶する学習制御と、学習済挙動を再現するように車両の挙動を制御する自動走行制御と、を実行する制御ユニットと、を備える。制御ユニットは、自動走行制御の実行中に、車両が、手動運転中に手動操作が行われた開始地点と利用者が指定した嗜好とに基いて特定される制御開始地点に到達した場合、学習済挙動に基いて挙動の制御を開始し、自動走行制御の実行中に行われた手動操作が所定のオーバーライド条件を満たし且つ手動操作が外部環境に起因せずに行われた場合、嗜好を変更することを利用者に提案する。
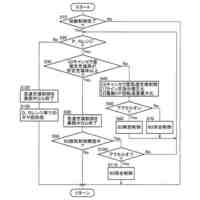
【選択図】 図5
特許請求の範囲
【請求項1】
車両の外部環境に関する環境情報を取得するセンサと、
手動運転中に行われた手動操作によって変化した前記車両の挙動を学習済挙動として記憶する学習制御と、前記学習済挙動を再現するように前記車両の挙動を制御する自動走行制御と、を実行する制御ユニットと、を備え、
前記制御ユニットは、
前記自動走行制御の実行中に、前記車両が、前記手動運転中に手動操作が行われた開始地点と利用者が指定した前記利用者の自動走行制御に関する嗜好とに基いて特定される制御開始地点に到達した場合、前記学習済挙動に基いて前記車両の挙動を制御する挙動制御を開始し、
前記自動走行制御の実行中に行われた前記手動操作が所定のオーバーライド条件を満たした場合、前記手動操作に基いて前記車両の挙動を制御するとともに、前記手動操作が前記外部環境に起因して行われたか否かを前記環境情報に基いて判定し、
前記手動操作が前記外部環境に起因せずに行われたと判定した場合、前記嗜好を変更することを前記利用者に提案する、
ように構成された、運転支援装置。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記制御ユニットは、前記車両の周辺に他車両が存在しないと前記環境情報に基いて判定した場合、前記操作が前記外部環境に起因せずに行われたと判定するように構成された、
運転支援装置。
【請求項3】
請求項1に記載の運転支援装置において、
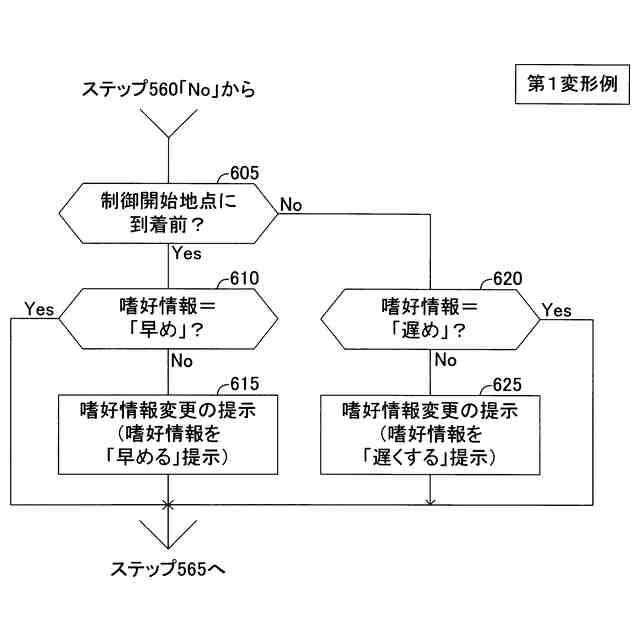
前記嗜好は、前記挙動制御を開始する開始タイミングを早くするか遅くするかに関する嗜好であり、
前記制御ユニットは、
前記手動操作が前記オーバーライド条件を満たし、且つ、前記手動操作が前記外部環境に起因せずに行われた場合、前記手動操作が前記制御開始地点に到達する前に行われたか否かを判定し、
前記手動操作が前記制御開始地点に到達する前に行われた場合、前記開始タイミングが早くなるように前記嗜好を変更することを提案し、
前記手動操作が前記制御開始地点に到達した後に行われた場合、前記開始タイミングが遅くなるように前記嗜好を変更することを提案する、
ように構成された、運転支援装置。
【請求項4】
請求項1に記載の運転支援装置において、
前記制御ユニットは、
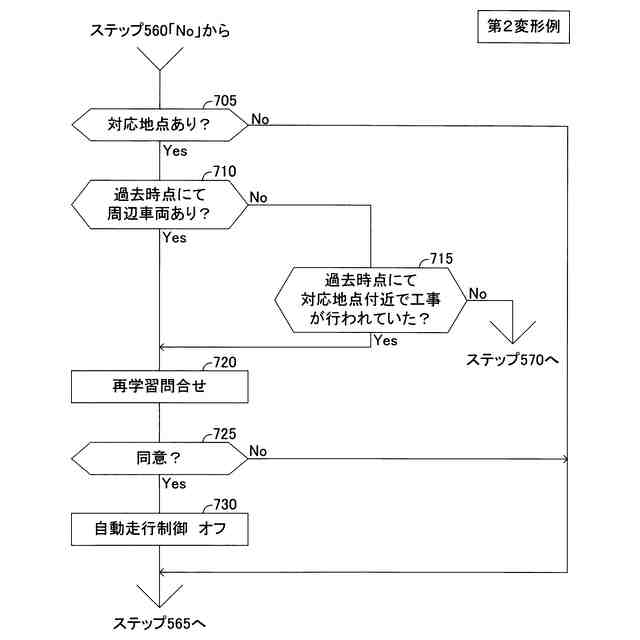
前記手動操作が前記オーバーライド条件を満たし、且つ、前記手動操作が前記外部環境に起因せずに行われた場合、当該手動操作が行われた地点に最も近い開始地点である対応地点に前記手動運転中の前記車両が位置していた過去時点で前記車両の周辺に他車両が存在したとの第1条件、及び、前記過去時点における前記車両の位置から所定範囲で工事が行われていたとの第2条件の少なくとも一方が成立するか否かを判定し、
前記第1条件及び前記第2条件の少なくとも一方が成立する場合、前記学習済挙動を記憶し直すか否かを前記利用者に問い合わせる、
ように構成された、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、手動運転中に行われた手動操作によって変化した車両の挙動を再現するように車両の挙動を制御する自動走行制御を実行する運転支援装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来から、「手動運転時に学習した車両の挙動」を再現するように車両の挙動を制御する自動走行制御を実行する運転支援装置が知られている。例えば、特許文献1に記載の運転支援装置(以下、「従来装置」と称呼する。)は、教師走行中の走行経路、車速、操舵角及び制動操作を記憶し、これらに基いて自動走行制御の一種である自動駐車制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2022-133181号公報
【発明の概要】
【0004】
利用者が自分の自動走行制御に関する嗜好を運転支援装置に予め指定しておき、利用者の嗜好を考慮した自動走行制御が実行されることが望ましい。例えば、上記嗜好は、自動走行制御において車両の挙動を手動運転時の挙動と一致させるための挙動制御を行う開始タイミングを早くするか遅くするかに関するものである。
【0005】
しかしながら、利用者が指定した嗜好(以下、「指定嗜好」と称呼する。)と利用者の本来の嗜好(以下、「本来嗜好」と称呼する。)とが異なる可能性がある。指定嗜好と本来嗜好とが異なる場合、本来嗜好と合わない自動走行制御が実行されることになり、利用者はこのような自動走行制御に対して違和感を抱く可能性が高い。従来装置は嗜好情報に基いて自動走行制御を実行しないため、従来装置においては、指定嗜好と本来嗜好とが異なることによって生じる上記課題は生じ得ない。
【0006】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、本来嗜好と合わない自動走行制御が実行される可能性を低減し、利用者が自動走行制御に対して違和感を抱く可能性を低減する運転支援装置を提供することにある。
【0007】
本発明の運転支援装置(以下、「本発明装置」と称呼する。)は、
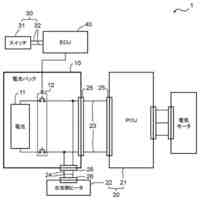
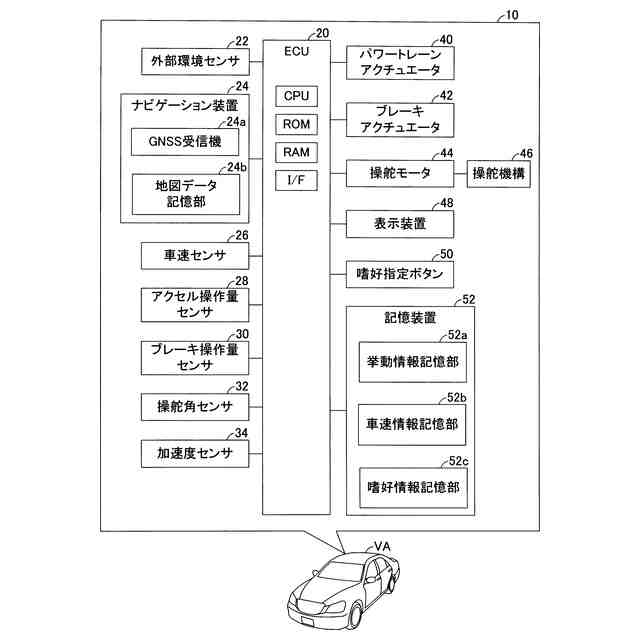
車両の外部環境に関する環境情報を取得するセンサ(22)と、
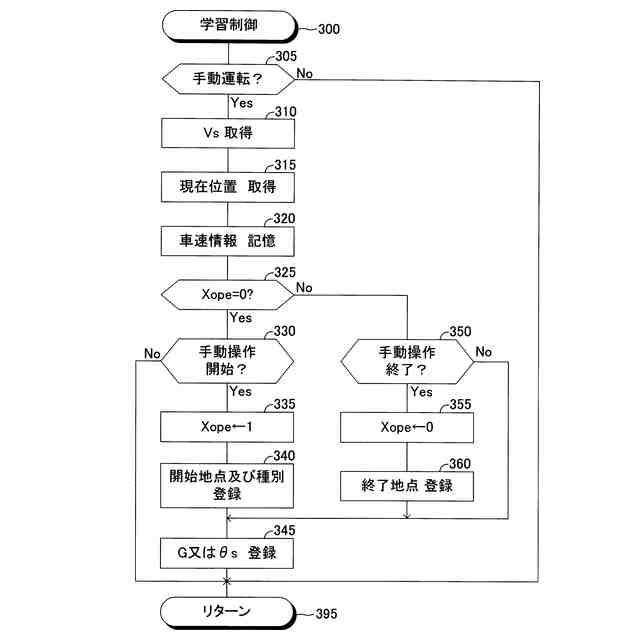
手動運転中に行われた手動操作によって変化した前記車両の挙動を学習済挙動として記憶する学習制御(ステップ300乃至ステップ395)と、前記学習済挙動を再現するように前記車両の挙動を制御する自動走行制御(ステップ500乃至ステップ595)と、を実行する制御ユニット(20)と、を備え、
前記制御ユニットは、
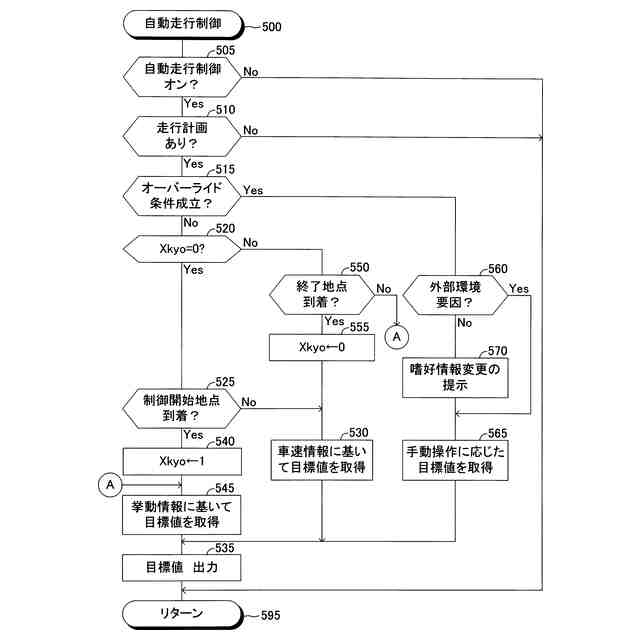
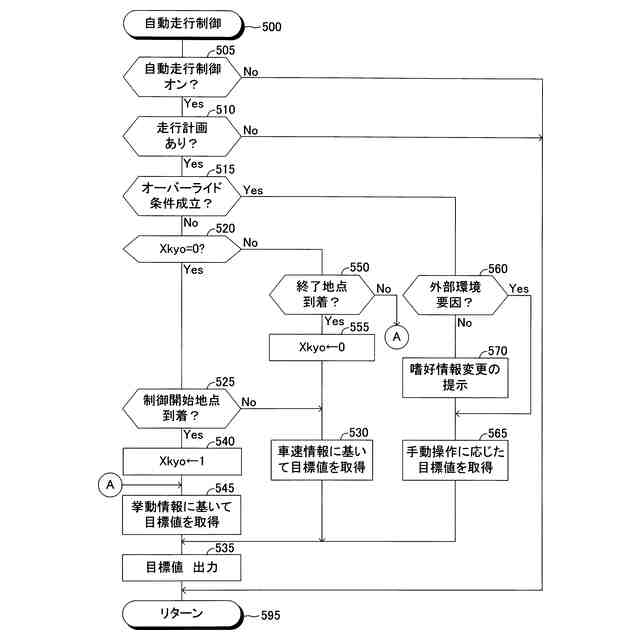
前記自動走行制御の実行中に(ステップ505「Yes」)、前記車両が、前記手動運転中に手動操作が行われた開始地点と利用者が指定した前記利用者の自動走行制御に関する嗜好とに基いて特定される制御開始地点に到達した場合(ステップ525「Yes」)、前記学習済挙動に基いて前記車両の挙動を制御する挙動制御を開始し(ステップ545、ステップ535)、
前記自動走行制御の実行中に行われた前記手動操作が所定のオーバーライド条件を満たした場合(ステップ515「Yes」)、前記手動操作に基いて前記車両の挙動を制御するとともに(ステップ565)、前記手動操作が前記外部環境に起因して行われたか否かを前記環境情報に基いて判定し(ステップ560)、
前記手動操作が前記外部環境に起因せずに行われたと判定した場合(ステップ560「No」)、前記嗜好を変更することを前記利用者に提案する(ステップ570)、
ように構成された、運転支援装置。
【0008】
本発明装置は、自動走行の実行中に手動操作がオーバーライド条件を満たした場合、手動操作に基いて車両の挙動を制御し、手動操作が外部環境に起因して行われたか否かを判定する。手動操作が外部環境に起因せずに行われた場合、利用者が自動走行制御に違和感を抱いて意図的に手動操作を行っている可能性が高い。つまり、指定嗜好と本来嗜好とが異なる可能性が高い。このため、本発明装置は、手動操作が外部環境に起因せずに行われた場合、嗜好を変更することを提案する。嗜好の変更が提案された場合、利用者は、本来嗜好に合った嗜好に変更する可能性が高くなる。これにより、本発明装置は、本来嗜好と合わない自動走行制御が実行される可能性を低減し、利用者が自動走行制御に対して違和感を抱く可能性を低減できる。
【図面の簡単な説明】
【0009】
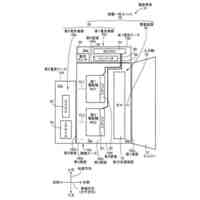
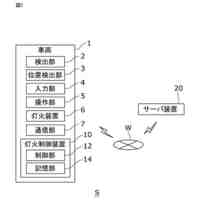
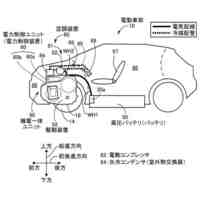
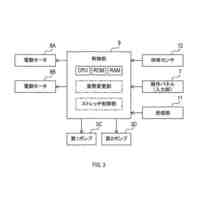
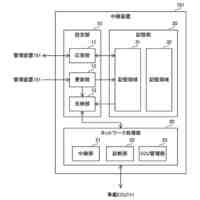
本発明の実施形態に係る運転支援装置の概略システム構成図である。
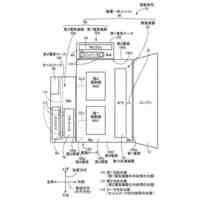
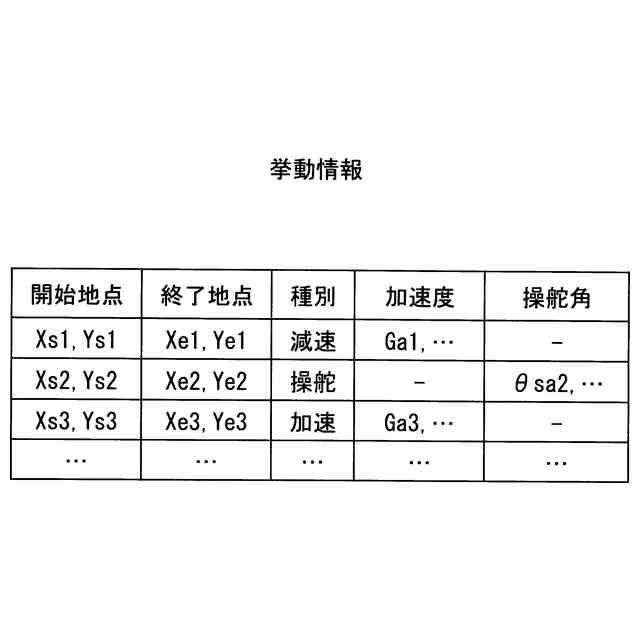
図1に示した挙動情報記憶部に記憶される挙動情報の説明図である。
図1に示したECUのCPUが実行する学習制御ルーチンのフローチャートである。
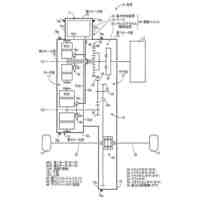
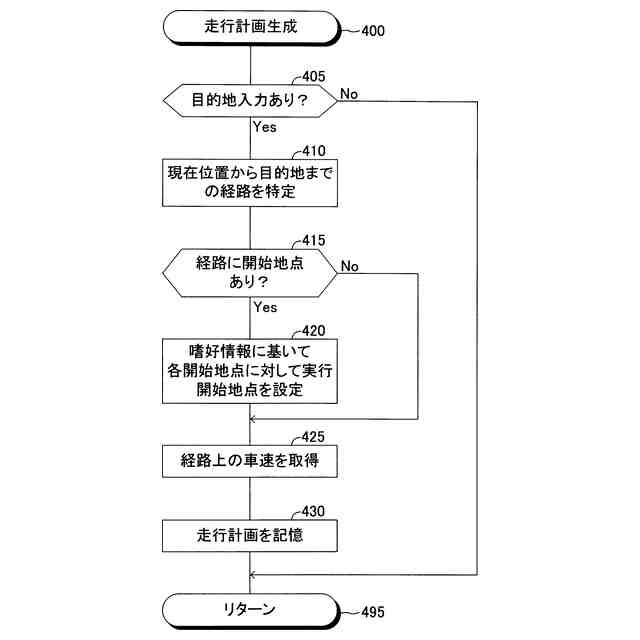
図1に示したECUのCPUが実行する走行計画生成ルーチンのフローチャートである。
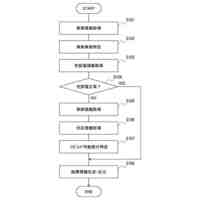
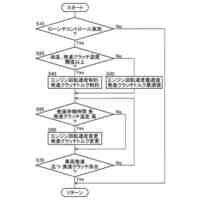
図1に示したECUのCPUが実行する自動走行制御ルーチンのフローチャートである。
本発明の実施形態の第1変形例に係るECUのCPUが実行する自動走行制御ルーチンの一部のフローチャートである。
本発明の実施形態の第2変形例に係るECUのCPUが実行する自動走行制御ルーチンの一部のフローチャートである。
【発明を実施するための形態】
【0010】
図1に示したように、本実施形態に係る運転支援装置10(以下、「本装置10」と称呼する。)は、車両VAに適用され、図1に示した構成要素を備える。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
端子接続構造
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理方法
2日前
トヨタ自動車株式会社
灯火制御装置
3日前
トヨタ自動車株式会社
駆動ユニット
2日前
トヨタ自動車株式会社
車両の制御装置
3日前
トヨタ自動車株式会社
車両の制御装置
3日前
トヨタ自動車株式会社
車両電源システム
2日前
トヨタ自動車株式会社
ハイブリッド車両
2日前
トヨタ自動車株式会社
ハイブリッド車両
2日前
トヨタ自動車株式会社
ラミネート型電池
3日前
トヨタ自動車株式会社
燃料電池ドローン
2日前
トヨタ自動車株式会社
ハイブリッド車両の制御装置
3日前
トヨタ自動車株式会社
電池の製造方法、及び、電池
2日前
トヨタ自動車株式会社
ハイブリッド車両の制御装置
3日前
トヨタ紡織株式会社
仮眠用シート
2日前
トヨタ自動車株式会社
リチウム二次電池、及びリチウム二次電池の製造方法
3日前
トヨタ自動車株式会社
電極活物質層、固体電池、及び電極活物質層の製造方法
3日前
トヨタ自動車株式会社
電極構造体
2日前
トヨタ自動車株式会社
車両制御装置
2日前
トヨタ自動車株式会社
固体電池用の電極合材スラリー及び電極合材スラリーの製造方法
2日前
株式会社豊田中央研究所
情報処理システム、情報処理方法及びプログラム
3日前
株式会社トヨタプロダクションエンジニアリング
鍛造キズ判定システム、鍛造キズ判定装置及び鍛造キズ判定方法
3日前
住友電気工業株式会社
車載中継装置、設定変更方法および設定変更プログラム
2日前
個人
飛行自動車
3か月前
個人
警告装置
1か月前
個人
車窓用防虫網戸
19日前
個人
授乳用車両
4か月前
個人
小型EVシステム
1か月前
個人
車輪清掃装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ