TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037310
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144152
出願日
2023-09-06
発明の名称
回収方法および回収システム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
10/13 20230101AFI20250311BHJP(航空機;飛行;宇宙工学)
要約
【課題】対象物の落下経路が変動したとしても、対象物を回収できる回収方法を提供すること。
【解決手段】空中を落下する対象物を無人航空機により回収する方法に関し、
空中を落下する対象物から対象物の状態情報を発信する情報発信ステップと、
状態情報に基づいて生成される指令情報に従って無人航空機が飛行して対象物を捕捉する回収ステップと、を備える。
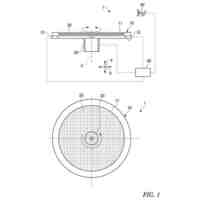
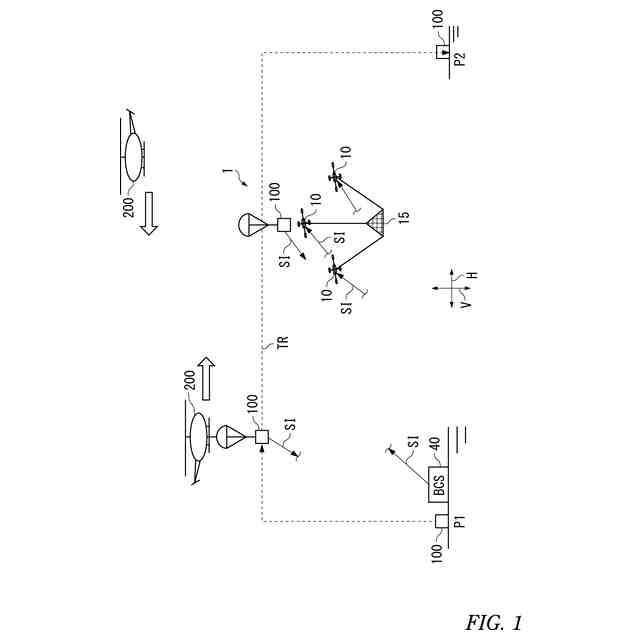
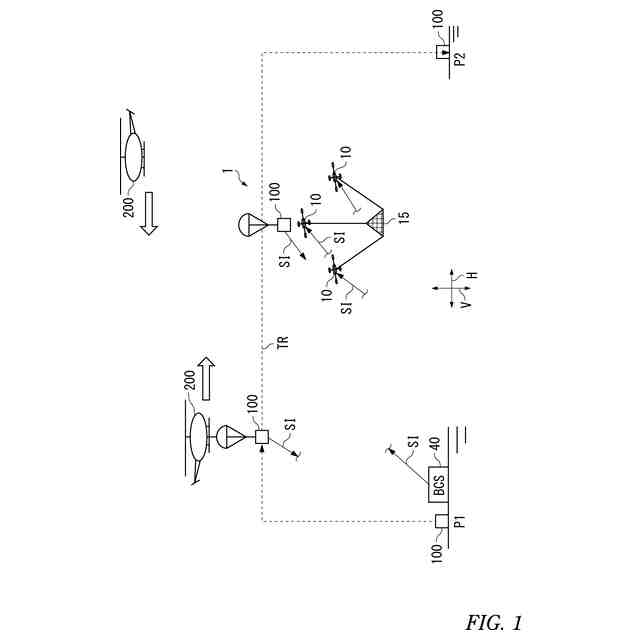
【選択図】図1
特許請求の範囲
【請求項1】
空中を落下する対象物を無人航空機により回収する方法であって、
空中を落下する前記対象物から前記対象物の状態情報を発信する情報発信ステップと、
前記状態情報に基づいて生成される指令情報に従って前記無人航空機が飛行して前記対象物を捕捉する回収ステップと、を備える、回収方法。
続きを表示(約 990 文字)
【請求項2】
前記情報発信ステップにおいて、
前記状態情報は、
前記対象物の対地についての位置状態情報と、
前記対象物の対地についての速度状態情報と、を含む、
請求項1に記載の回収方法。
【請求項3】
前記情報発信ステップにおいて、
前記対象物が備える状態情報生成部は、衛星測位システムから受信する電波に基づいて、前記位置状態情報と前記速度状態情報を生成する、
請求項2に記載の回収方法。
【請求項4】
前記回収ステップにおいて、
前記指令情報は、
前記無人航空機の対地に対する位置指令情報と、
前記無人航空機の対地に対する速度指令情報と、
前記無人航空機の対地に対する加速度指令情報と、を含む、
請求項1に記載の回収方法。
【請求項5】
前記回収ステップにおいて、
前記無人航空機が支持する捕捉具により前記対象物を捕捉する、
請求項1に記載の回収方法。
【請求項6】
前記回収ステップにおいて、
複数の前記無人航空機が支持する網状の前記捕捉具により前記対象物を捕捉する、
請求項5に記載の回収方法。
【請求項7】
前記回収ステップにおいて、
複数の前記無人航空機の前記対象物に対する相対位置が一定になるように、複数の前記無人航空機の飛行が制御される、
請求項1に記載の回収方法。
【請求項8】
前記回収ステップにおいて、
複数の前記無人航空機の間隔が一定に保たれるように、複数の前記無人航空機の飛行が制御される、
請求項7に記載の回収方法。
【請求項9】
空中を落下する前記対象物は、パラシュートに支持されている、
請求項1から請求項8のいずれか一項に記載の回収方法。
【請求項10】
空中を落下する対象物を無人航空機により回収するシステムであって、
前記対象物に設けられ、前記対象物の状態情報を生成し、かつ、発信する状態情報生成部と、
前記無人航空機に設けられ、前記状態情報に基づいて指令情報を生成し、かつ、前記無人航空機の飛行を制御する制御部と、を備える、回収システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、空中を落下する対象物を無人航空機(Unmanned Aerial Vehicle:UAV)で回収する方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
上空から投下され落下してくる貨物や構造物などの物体に関して、それを破壊せずに回収するために、落下物にパラシュートをつけたり、落下した時の衝撃を吸収する干渉材をつけたりする。もしくは回収型ロケットのように、着地直前にエンジンを噴射させて回収する方法など、様々な手法が検討され、実現されている。
【0003】
対象物の一例であるUAVについて、特許文献1は以下の回収方法を提案する。つまり、特許文献1は、地上に水平に張った回収用ネットを備え、UAVをこの回収用ネットの上空で旋回させるステップと、風下方向から高迎角で機体を降下させ、回収用ネット上に着陸させるステップと、を備える。
特許文献1の回収方法によれば、機体が横風を受けることなく機首を上げた高迎角状態のまま急角度で降下させ、水平に張られた回収用ネット面上に安定して着地させることができる。つまり、特許文献1は、水平飛行からの着陸ではないので回収用ネットが設置される領域を狭くできる。
【先行技術文献】
【特許文献】
【0004】
特開2010-173401号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1における回収の対象物であるUAVは推進力を備えることを前提としており、特許文献1は推進力を有しない物体の回収には不向きである。つまり、空中を落下する物体には例えば気流が作用するために、最終的な落下位置を含め、物体の落下経路は気象条件に応じて刻一刻と変わり得る。
以上より、本開示は、対象物の落下経路が変動したとしても、対象物を回収できる回収方法を提供することを目的とする。また、本開示は、そのような回収方法を実現できる回収システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示は、空中を落下する対象物を無人航空機により回収する方法に関する。
本開示の回収方法は、
空中を落下する対象物から対象物の状態情報を発信する情報発信ステップと、
状態情報に基づいて生成される指令情報に従って無人航空機が飛行して対象物を捕捉する回収ステップと、を備える。
【0007】
また、本開示は空中を落下する物体を無人航空機により回収するシステムに関する。
本開示の回収システムは、
対象物に設けられ、対象物の状態情報を生成し、かつ、発信する状態情報生成部と、
無人航空機に設けられ、状態情報に基づいて指令情報を生成し、かつ、無人航空機の飛行を制御する制御器と、を備える。
【発明の効果】
【0008】
本開示によれば、回収の対象物から対象物の状態情報を発信し、この状態情報に基づいて生成される指令情報に従って無人航空機が飛行して対象物を捕捉する。したがって、本開示の回収方法によれば、対象物の落下経路が変動したとしても、対象物を回収できる。
【図面の簡単な説明】
【0009】
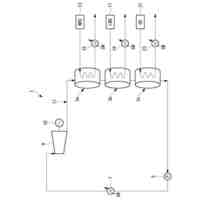
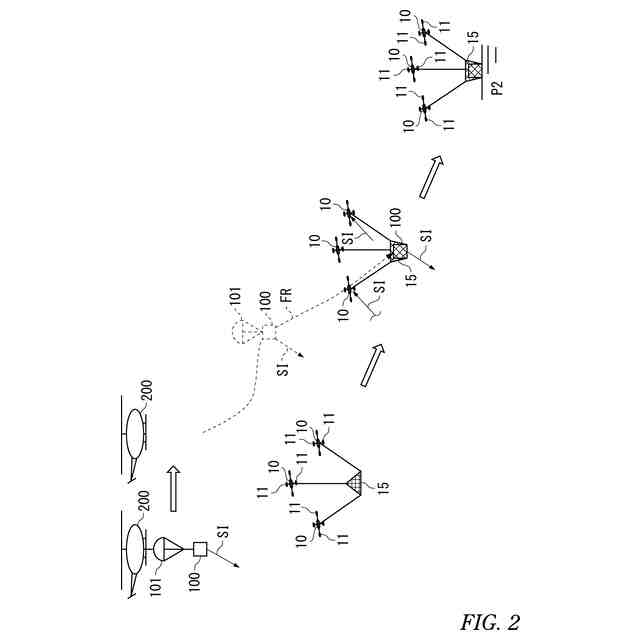
実施形態に係る回収方法を含む物品の搬送方法の概要を示す図である。
実施形態に係る回収方法の要旨を示す図である。
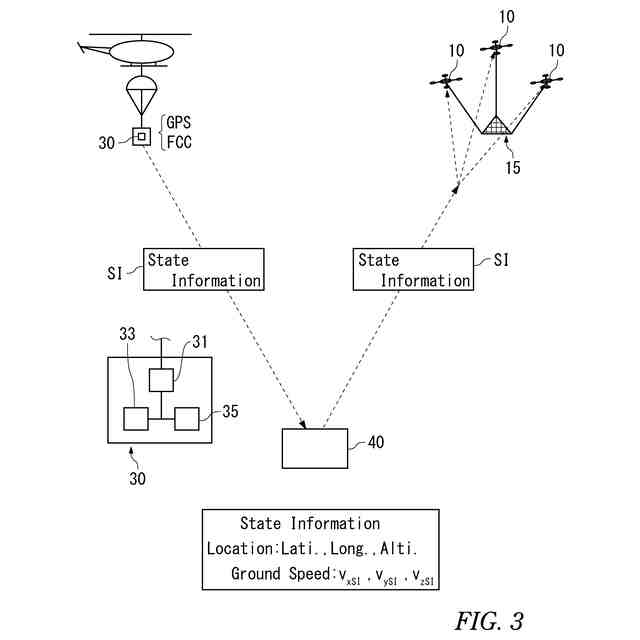
実施形態に係る回収方法の要旨を示す図である。
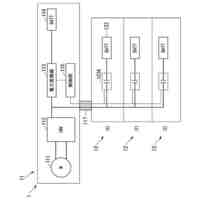
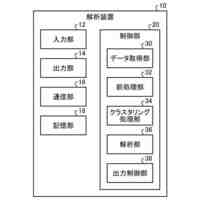
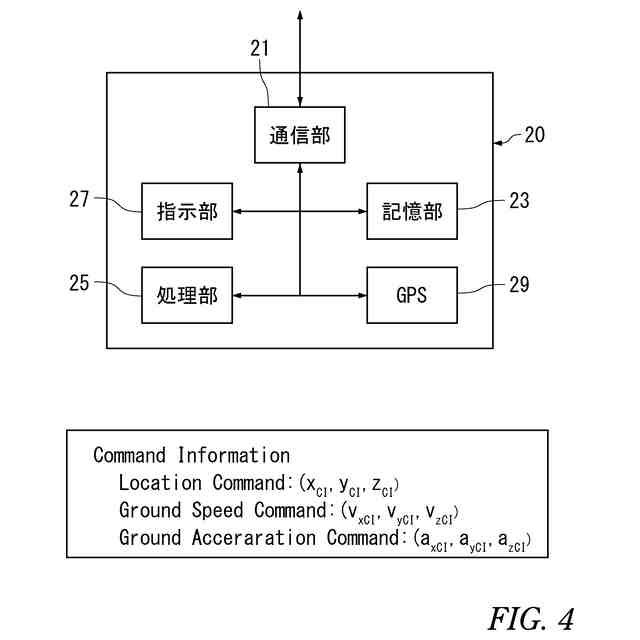
実施形態に係る回収方法におけるUAVの制御部を示す図である。
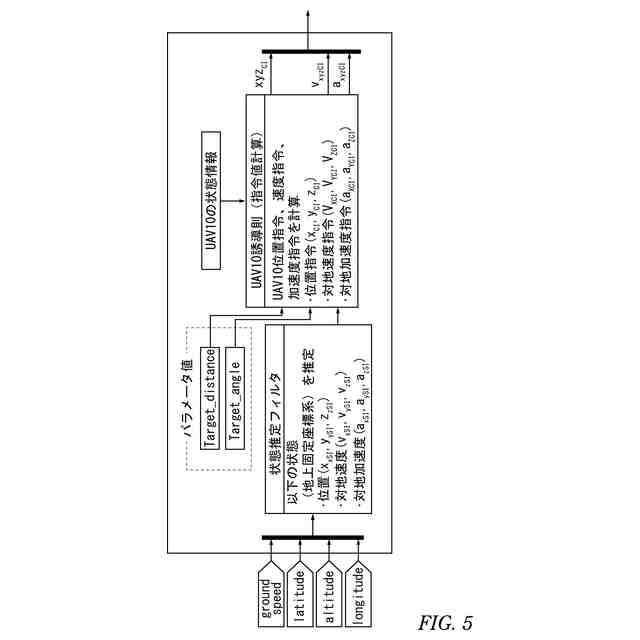
実施形態に係る回収方法における指令情報を生成する手順を説明する図である。
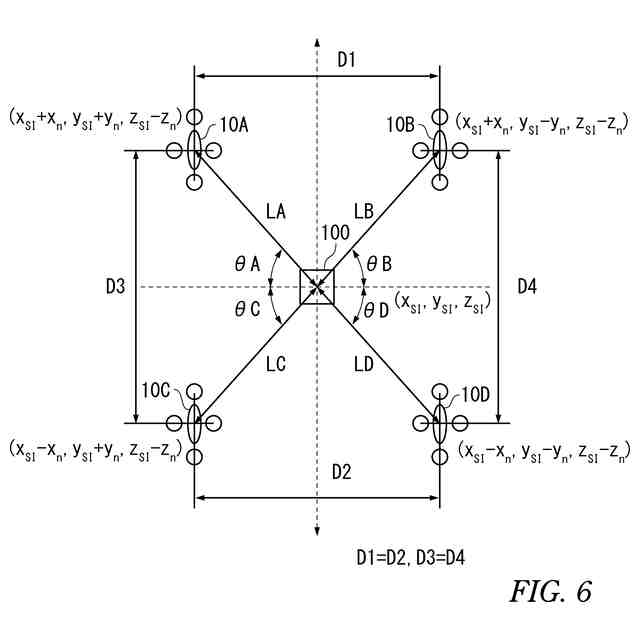
他の実施形態に係る回収方法の要旨を示す図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、実施形態に係る物体の回収方法および回収システムについて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
接合方法
10日前
三菱重工業株式会社
遊星変速装置
3日前
三菱重工業株式会社
加熱デバイス
10日前
三菱重工業株式会社
離着陸パッド装置
17日前
三菱重工業株式会社
燃料加熱システムの充圧方法
1日前
三菱重工業株式会社
風車翼及び風車翼の設計方法
1日前
三菱重工業株式会社
塩化マグネシウムの製造システム
9日前
三菱重工業株式会社
コンテナトレーラー及び制御方法
7日前
三菱重工業株式会社
ガスバーナ及びこれを備えたボイラ
14日前
三菱重工業株式会社
ガスバーナ及びこれを備えたボイラ
14日前
三菱重工業株式会社
マイナーアクチノイドの核変換方法
10日前
三菱重工業株式会社
冷熱ORC発電装置及びその運転方法
3日前
三菱重工業株式会社
冷熱ORC発電装置及びその運転方法
3日前
三菱重工業株式会社
冷熱ORC発電装置及びその運転方法
11日前
三菱重工業株式会社
燃料の加熱方法及び燃料の加熱システム
7日前
三菱重工業株式会社
解析装置、解析方法及び解析プログラム
8日前
三菱重工業株式会社
ガスバーナおよびガスバーナの運転方法
8日前
三菱重工業株式会社
風車翼の保護層範囲決定方法及び風車翼
2日前
三菱重工業株式会社
バーナ及びボイラ並びにバーナの運転方法
今日
三菱重工業株式会社
起動制御装置、起動制御方法、及び、起動制御プログラム
1日前
三菱重工業株式会社
バッテリー付きコンテナ、コンテナ施設、及びコンテナトレーラー
7日前
三菱重工業株式会社
情報処理システム、情報処理方法、学習システム、および学習方法
14日前
三菱重工業株式会社
給水制御システム、給水制御装置、給水制御方法、およびプログラム
11日前
三菱重工業株式会社
冷熱ORC発電装置及びその制御方法並びに冷熱ORC発電装置の有機流体充填方法
3日前
三菱重工業株式会社
入力モジュールの試験方法、出力モジュールの試験方法、試験用出力モジュール、試験用入力モジュール、入力モジュールの試験システム、および出力モジュールの試験システム
7日前
個人
飛行体
12か月前
個人
ドローン
21日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
空港用貨物搬送車
10か月前
個人
垂直離着陸機用エンジン改
1か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
個人
ドローンの計測操作方法2
6か月前
個人
マルチコプター型電気飛行機
11か月前
キヤノン電子株式会社
磁気トルカ
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ