TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025026066
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131416
出願日
2023-08-10
発明の名称
電気車制御装置
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
H02P
21/02 20060101AFI20250214BHJP(電力の発電,変換,配電)
要約
【課題】 回転電動機と電気車制御装置とを合わせたシステム全体の運転効率を改善する電気車制御装置を提供する。
【解決手段】
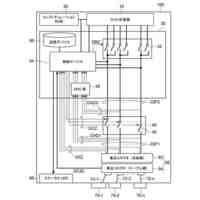
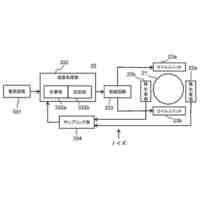
実施形態による電気車制御装置は、直流電源から供給された直流電力を交流電力に変換して回転電動機へ出力するインバータ主回路21を含み、回転電動機の回転速度がゼロから上昇していくに従ってインバータ主回路21の出力電圧を上昇させた後に、回転電動機3が搭載された車両の車両速度が回転電動機2のトルク指令パターンに応じて設定された所定値を超えたときにインバータ主回路21の出力電圧を一定の値とするように、インバータ主回路21を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
直流電源から供給された直流電力を交流電力に変換して回転電動機へ出力するインバータ主回路を含み、
前記回転電動機の回転速度がゼロから上昇していくに従って前記インバータ主回路の出力電圧を上昇させた後に、前記回転電動機が搭載された車両の車両速度が前記回転電動機のトルク指令パターンに応じて設定された所定値を超えたときに前記インバータ主回路の出力電圧を一定の値とするように、前記インバータ主回路を制御する電気車制御装置。
続きを表示(約 970 文字)
【請求項2】
前記回転電動機への電流をトルク電流と励磁電流とに分けて、前記トルク指令パターンより得られるトルク電流指令と励磁電流指令とに基づいて、トルク電流と励磁電流とのそれぞれを制御する電気車制御装置であって、
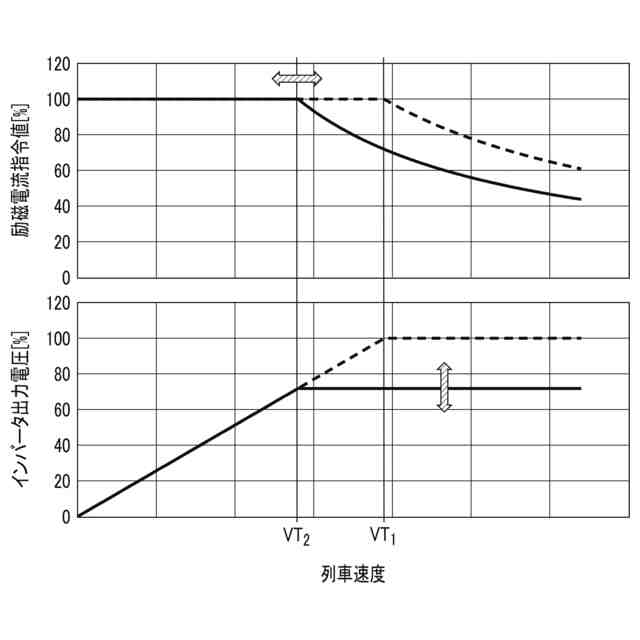
前記インバータ主回路の出力電圧は前記車両速度に比例して増加し、前記インバータ主回路の出力電圧が前記インバータ主回路の出力可能な最大電圧となる前記車両速度が第1車両速度であって、
前記トルク指令パターンが最大値であって前記車両速度が前記第1車両速度以下のときに、前記励磁電流指令を一定とし、前記車両速度が前記第1車両速度を超えているときに前記インバータ主回路の出力電圧が最大電圧一定となるように、前記励磁電流指令を前記車両速度に反比例させて減少させ、
前記トルク指令パターンが前記最大値より小さい値であって、前記車両速度が前記第1車両速度よりも小さい第2車両速度を超えているときに、前記インバータ主回路の出力電圧が前記第2車両速度における値となるように、前記励磁電流指令を前記車両速度に反比例させて減少させる、請求項1記載の電気車制御装置。
【請求項3】
複数の前記トルク指令パターンが供給され、複数の前記トルク指令パターンそれぞれに応じて前記第2車両速度を切り換える、請求項2記載の電気車制御装置。
【請求項4】
交流電源から供給された交流電力を直流電力に変換して前記インバータ主回路に供給するコンバータ主回路を更に備え、
前記インバータ主回路の出力電圧の目標値が、前記インバータ主回路の最大電圧未満となるときに、前記コンバータ主回路から出力される直流電圧を、前記インバータ主回路の出力の最大電圧における直流電圧から下限値までの範囲で任意に引き下げることを可能とする、請求項2記載の電気車制御装置。
【請求項5】
前記トルク指令パターンに基づく前記インバータ主回路の出力電圧の目標値が、前記インバータ主回路の最大出力電圧未満となるときに、前記インバータ主回路および前記回転電動機を含むシステム全体のエネルギー損失が低減されるように、前記インバータ主回路を駆動するPWMモードを任意に変更可能である、請求項1記載の電気車制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、電気車制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
一般に、交流回転電動機を駆動させる電気車制御装置は、低速域から中速域にかけて出力電圧を回転速度に比例して増加し、電気車制御装置が出力可能な最大出力電圧まで出力電圧が上昇すると、以降の高速域では出力電圧が最大出力電圧一定に制御される。この場合、中間の力行ノッチ等の、回転速度が高く、出力トルクが低い領域では、交流回転電動機と電気車制御装置とを合わせたシステム全体の最大効率で運転できているとは限らない。このため、高速域での定速制御等、速度維持のために小さな出力トルクを必要とする運転モードでのシステム全体として効率が悪化することがあった。
【0003】
従来、交流回転電動機と電気車制御装置とを合わせたシステム全体の運転効率を改善するために、交流回転電動機に印加する電圧や電流を変えることが提案されている。
【0004】
例えば、従来、交流回転電動機の回転数の上昇に従って、電気車制御装置が出力電圧を上昇させた後、出力電圧が最大値まで達した後に、当該回転数の上昇に従って、交流回転電動機の銅損と鉄損の合計損失が最小となるように出力電圧を下降させる制御を行うことが提案されている。
【0005】
また、従来、交流回転電動機の損失を最小にするような第1の磁束指令値と、電気車制御装置が交流回転電動機を1パルスモードで制御する場合の磁束指令値である第2の磁束指令値をそれぞれ定義し、交流回転電動機の損失と電気車制御装置の損失との総和がより少ない方の磁束指令値を選択して切り替える制御を行うことが提案されている。
【0006】
また、従来、電気車制御装置によって制御される交流回転電動機のトルク電流指令と励磁電流指令とについて、両者による電流実効値が最小となる条件の励磁電流指令を第1の励磁電流指令と定義し、交流回転電動機の銅損と鉄損の合計損失が第1の励磁電流指令を用いた場合よりも減少する補償分を演算して、第1の励磁電流指令から補償分を減算した第2の励磁電流指令で制御を行うことが提案されている。
【先行技術文献】
【特許文献】
【0007】
特許第6751683号公報
特許第4956611号公報
特許第5586798号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
電気車用の電気車制御装置と交流回転電動機の組み合わせは、力行の最大ノッチかつ定格速度での両者の合計損失(主回路損失)が最小となるように設計されることが多い。このため力行の中間ノッチかつ定格速度以上の高速域等では、主回路損失が最小にはならず、高速域で列車速度を維持するため等の定速制御運転等での機器効率が悪化することがあった。
【0009】
本発明の実施形態は、上記事情を鑑みて成されたものであって、回転電動機と電気車制御装置とを合わせたシステム全体の運転効率を改善する電気車制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
実施形態による電気車制御装置は、直流電源から供給された直流電力を交流電力に変換して回転電動機へ出力するインバータ主回路を含み、前記回転電動機の回転速度がゼロから上昇していくに従って前記インバータ主回路の出力電圧を上昇させた後に、前記回転電動機が搭載された車両の車両速度が前記回転電動機のトルク指令パターンに応じて設定された所定値を超えたときに前記インバータ主回路の出力電圧を一定の値とするように、前記インバータ主回路を制御する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
電子機器
7日前
株式会社東芝
制御装置
1か月前
株式会社東芝
回転電機
13日前
株式会社東芝
遮断装置
6日前
株式会社東芝
立て看板
1か月前
株式会社東芝
搬送装置
7日前
株式会社東芝
判定装置
8日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
12日前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電磁流量計
1日前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
操作盤カバー
5日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
1日前
株式会社東芝
スイッチギヤ
28日前
株式会社東芝
アンテナ装置
5日前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
区分システム
1か月前
株式会社東芝
車両システム
1か月前
株式会社東芝
アイソレータ
20日前
株式会社東芝
紙葉類処理装置
19日前
株式会社東芝
計算機システム
1日前
株式会社東芝
粒子線治療装置
1か月前
株式会社東芝
X線厚み測定装置
1か月前
株式会社東芝
バックアップ回路
19日前
株式会社東芝
磁気ディスク装置
5日前
株式会社東芝
磁気ディスク装置
5日前
株式会社東芝
磁気ディスク装置
5日前
株式会社東芝
磁気ディスク装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ