TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011983
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114475
出願日
2023-07-12
発明の名称
ピッキングロボットシステムおよびピッキングロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B25J
13/08 20060101AFI20250117BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピッキングロボットシステムにおいて、多数のワークを1つのコンテナに収容した場合でも、コンテナからのピックが簡単な制御で容易に行えるようにする。
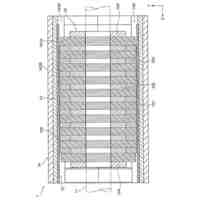
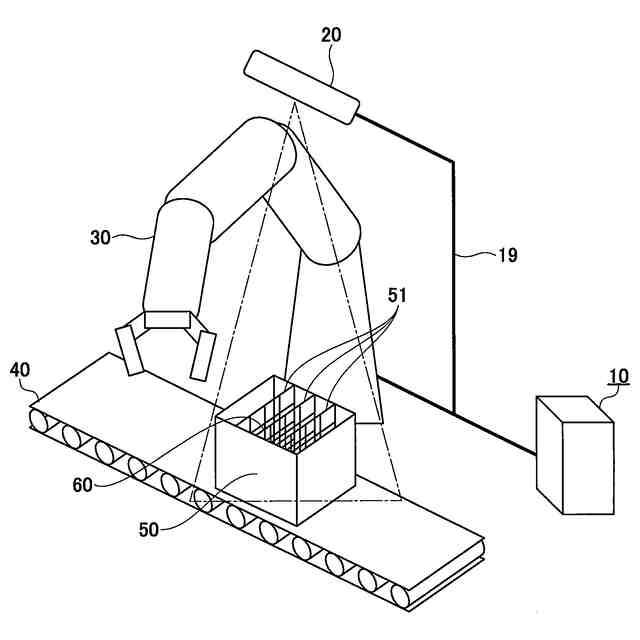
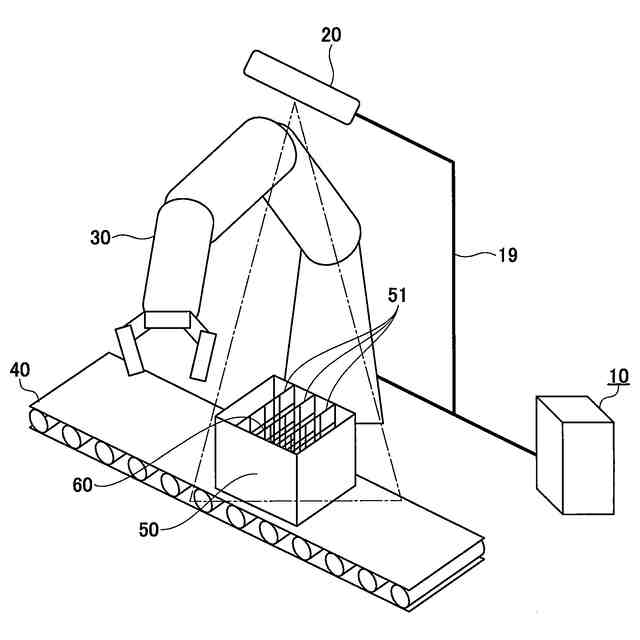
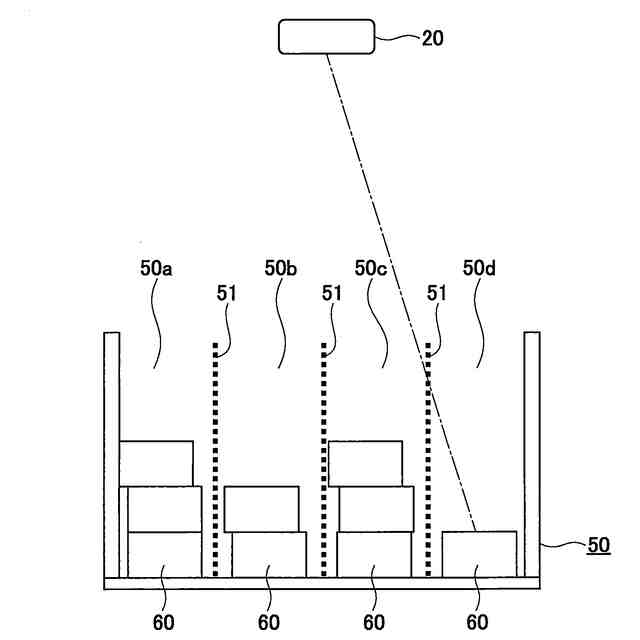
【解決手段】、コンテナ50内のワークを、ロボット30によりコンテナの上面からピックする構成とした場合に、コンテナ50は、内部を複数の区画に仕切る網目形状の仕切り板51を備える。網目形状の仕切り板51であるため、カメラ20などでコンテナ50の内部のワークを正しく認識することができ、ロボット30が、コンテナ50の各区画に配置されたワークを正確にピックすることができる。
【選択図】図1
特許請求の範囲
【請求項1】
コンテナ内のワークを、ロボットにより前記コンテナの上面からピックするピッキングロボットシステムであり、
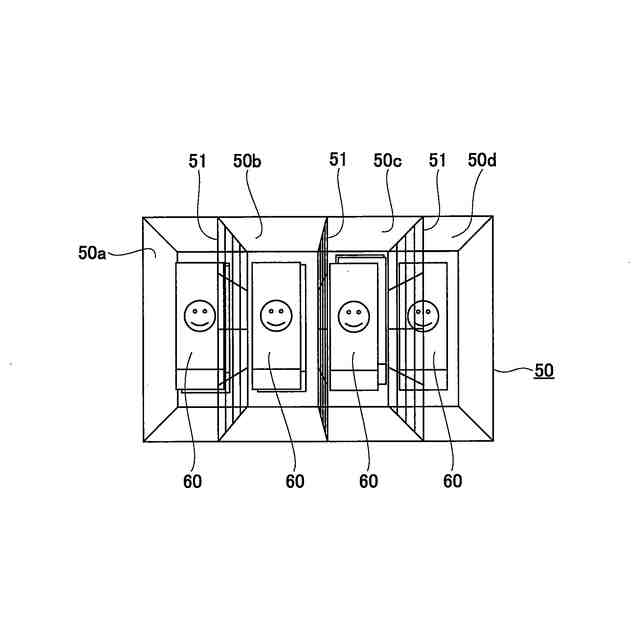
前記コンテナは、内部を複数の区画に仕切る網目形状の仕切り板を備え、
前記ロボットが、前記コンテナの各区画に配置された前記ワークをピックする
ピッキングロボットシステム。
続きを表示(約 870 文字)
【請求項2】
前記仕切り板は、前記コンテナから引き抜いて除去できる
請求項1に記載のピッキングロボットシステム。
【請求項3】
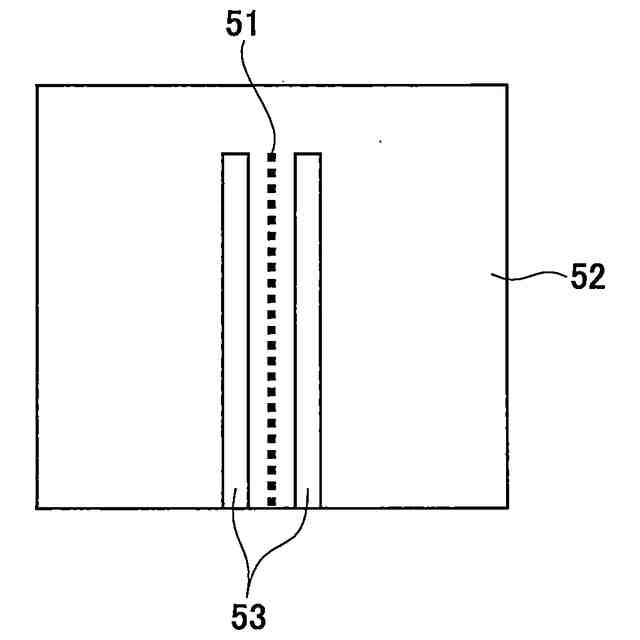
前記仕切り板は、高さ方向に分割した一部のみを前記コンテナから引き抜いて除去できるようにした
請求項2に記載のピッキングロボットシステム。
【請求項4】
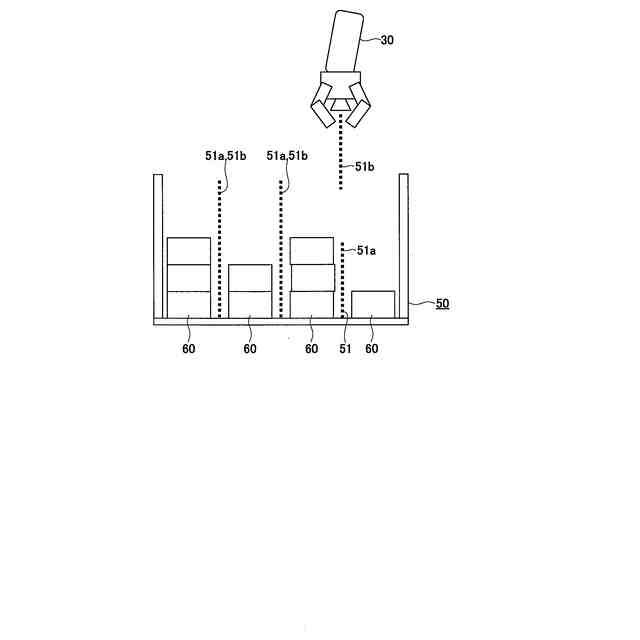
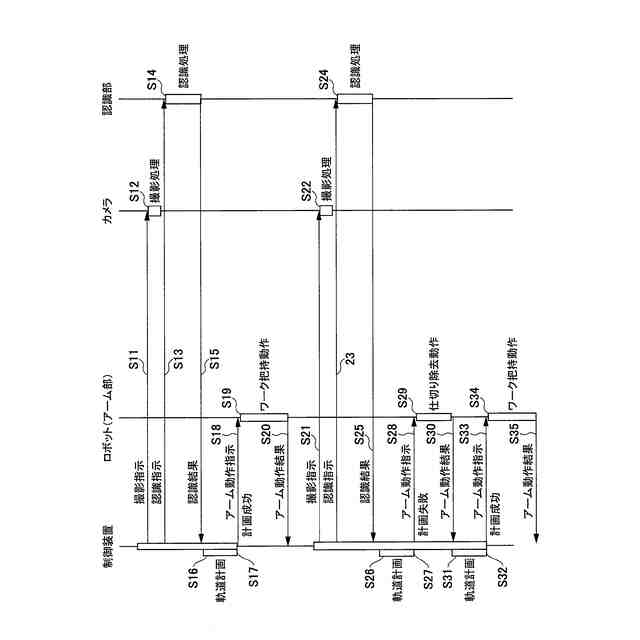
前記ロボットは、前記コンテナ内の前記ワークの位置を認識し、認識した前記ワークをピックする軌道計画を行って、前記仕切り板が、認識又はアーム動作の邪魔になると判定した場合に、前記コンテナ内の前記仕切り板を除去する
請求項2に記載のピッキングロボットシステム。
【請求項5】
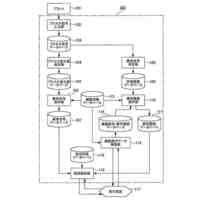
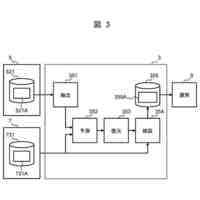
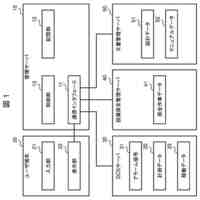
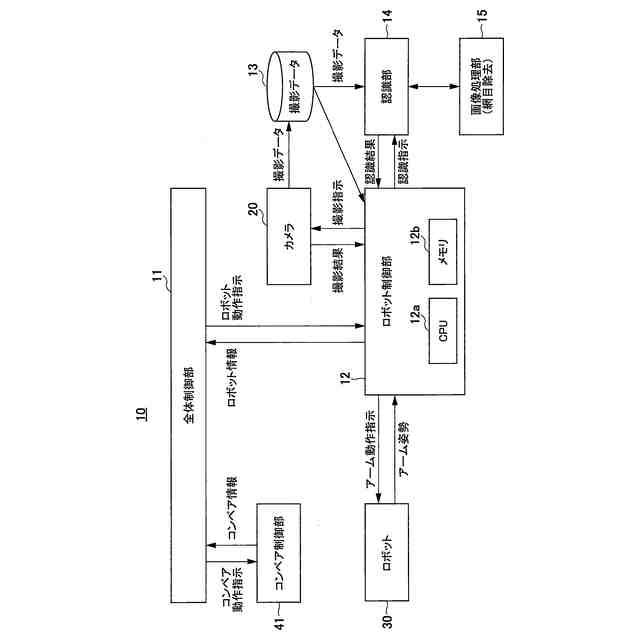
前記コンテナ内を撮影する撮影部と、
前記撮影部で撮影したデータを点群化する画像処理部と、
前記画像処理部で得た点群化撮影データから前記コンテナ内の前記ワークを認識する認識部と、
前記認識部が認識した前記ワークを前記ロボットによりピッキングさせるロボット制御部と、を備え、
前記画像処理部は、前記仕切り板の位置に存在する点群を除去し、前記認識部は、前記仕切り板が除去された点群化撮影データから前記ワークを認識する
請求項1に記載のピッキングロボットシステム。
【請求項6】
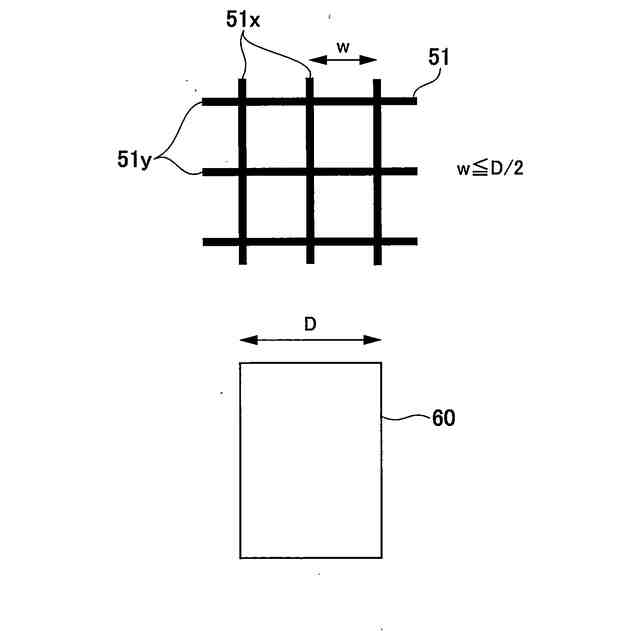
前記仕切り板の網目は、コンテナに配置されるワークの一辺の長さの半分以下の間隔の格子状である
請求項1に記載のピッキングロボットシステム。
【請求項7】
コンテナ内のワークを、ロボットにより前記コンテナの上面からピックするピッキングロボット制御方法であり、
前記コンテナは、内部を複数の区画に仕切る網目形状の仕切り板を配置し、
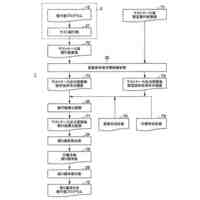
前記網目形状の仕切り板で仕切られた前記コンテナの各区画の前記ワークを認識する認識処理と、
前記認識処理で認識された各区画の前記ワークをピックするピック処理と、を含む
ピッキングロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキングロボットシステムおよびピッキングロボット制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、物流倉庫での出荷時の搬送作業をロボットで自動化することが行われている。
例えば、出荷対象物であるワーク(物品)を保管用(作業用)のコンテナから取り出してピック作業を行い、ピックしたワークを出荷用容器に入れる作業を、ピッキングロボットにより自動化することが進められている。
【0003】
通常、コンテナには、複数のワークが入れられ、ピッキングロボットは、コンテナから必要な数だけワークをピックして出荷用容器に入れる作業を実行する。ここで、コンテナ内のワークは、整列して積み上げられていれば、ロボットは容易にピックすることができる。しかし、内部のワークが常に整列した状態で積み上げられているとは限らないので、ピッキングロボットによる作業性が悪くなる場合も考えられる。
【0004】
特許文献1には、ワークを収容する作業用コンテナとして、仕切り板で縦横に仕切って多数のワーク収容室を設け、それぞれのワーク収容室に、個別にワークを収容する技術が記載されている。特許文献1に記載の技術は、個別にワークを収容することで、ワーク同士がぶつかって損傷するのを防止できると共に、1つのコンテナ内に複数種類のワークを入れた場合でも、それぞれのワークが別々の区画に配置されるようになる。
【先行技術文献】
【特許文献】
【0005】
特開平5-301143号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術によれば、ワーク収容室にワークが個別に収容され、コンテナ内でワークの配置が乱れることがなく、ロボットによりそれぞれのワークを適正にピックすることができる。
しかしながら、1つ1つのワークを個別に収めるような細かい仕切り板を設けると、ロボットがピックする際にカメラでコンテナ内を撮影して、ワークの状態を確認しようとしても、仕切り板が死角になって、ワークの上面以外の面が正しく確認することができない。
【0007】
この問題を解決するためには、例えば認識用のカメラを多数配置して、多数のカメラで複数のアングルから撮影した画像からワークを認識することが考えられる。すなわち、多数のカメラで複数のアングルから撮影することで、死角が少なくなり、ワークを正しく認識することができる。しかしながら、認識用のカメラを複数台にすると、それだけシステム構成が高価なものになってしまうという問題が発生する。
【0008】
また、仕切り板があると、ロボットのアームの先端が仕切り板と接触して、ワークを掴むことができない場合がある。したがって、特許文献1に記載されるように、仕切り板でコンテナ内を細かく区切る構成とした場合には、アームの先端がコンテナ内の各区画に入るように工夫するか、あるいは吸着でワークを掴むようにする等の対処が必要であり、特殊で高価なロボットが必要になってしまう。
【0009】
本発明は、かかる点に鑑み、多数のワークを1つのコンテナに収容した場合でも、コンテナからのピックが簡単な制御で容易に行えるピッキングロボットシステムおよびピッキングロボット制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、例えば請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、ピッキングロボットシステムとして、コンテナ内のワークを、ロボットによりコンテナの上面からピックするものであり、コンテナは、内部を複数の区画に仕切る網目形状の仕切り板を備え、ロボットが、コンテナの各区画に配置されたワークをピックするようにした。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
鉄道車両
8日前
株式会社日立製作所
回転電機
1日前
株式会社日立製作所
回転電機
1日前
株式会社日立製作所
冷却制御方法
1日前
株式会社日立製作所
制御デバイス
1日前
株式会社日立製作所
放電検出回路
5日前
株式会社日立製作所
電動推進装置
1日前
株式会社日立製作所
電力変換装置
1日前
株式会社日立製作所
立体構造宇宙機
8日前
株式会社日立製作所
データ表示方法
1日前
株式会社日立製作所
踏切制御システム
16日前
株式会社日立製作所
電動アクチュエータ
1日前
株式会社日立製作所
プラント管理システム
1日前
株式会社日立製作所
シミュレーション装置
2日前
株式会社日立製作所
検索方法及び検索装置
2日前
株式会社日立製作所
コントローラシステム
16日前
株式会社日立製作所
電気化学反応システム
1日前
株式会社日立製作所
隔膜セル及び電子顕微鏡
1日前
株式会社日立製作所
環境対応製品提案システム
10日前
株式会社日立製作所
演算装置、ノイズ低減方法
1日前
株式会社日立製作所
プログラム不具合特定装置
5日前
株式会社日立製作所
ソフトウェア管理システム
16日前
株式会社日立製作所
二酸化炭素資源化システム
8日前
株式会社日立製作所
予測システム及び予測方法
1日前
株式会社日立製作所
配列情報処理装置および方法
2日前
株式会社日立製作所
行動変容促進システム及び方法
16日前
株式会社日立製作所
電力需要調整方法およびシステム
8日前
株式会社日立製作所
通知制御システム、通知制御方法
1日前
株式会社日立製作所
回転構造体、及び、エレベーター
16日前
株式会社日立製作所
帳票認識装置、及び帳票認識方法
9日前
株式会社日立製作所
移動管理システム及び移動管理方法
1日前
株式会社日立製作所
計算機システム及び計画の評価方法
1日前
株式会社日立製作所
テスト支援装置及びテスト支援方法
1日前
株式会社日立製作所
情報処理システム及び情報処理方法
8日前
株式会社日立製作所
業務支援システム及び業務支援方法
8日前
株式会社日立製作所
設備管理システム及び設備管理方法
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ