TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025000519
公報種別
公開特許公報(A)
公開日
2025-01-07
出願番号
2023100405
出願日
2023-06-19
発明の名称
歩行補助装置、制御装置、及び制御プログラム
出願人
学校法人早稲田大学
代理人
弁理士法人ドライト国際特許事務所
主分類
A61H
3/00 20060101AFI20241224BHJP(医学または獣医学;衛生学)
要約
【課題】歩行者の歩行動作の変化に迅速に対応して、目標歩行周期を推定することができる歩行補助装置を提供する。
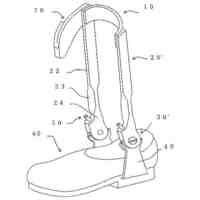
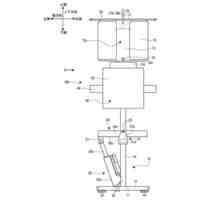
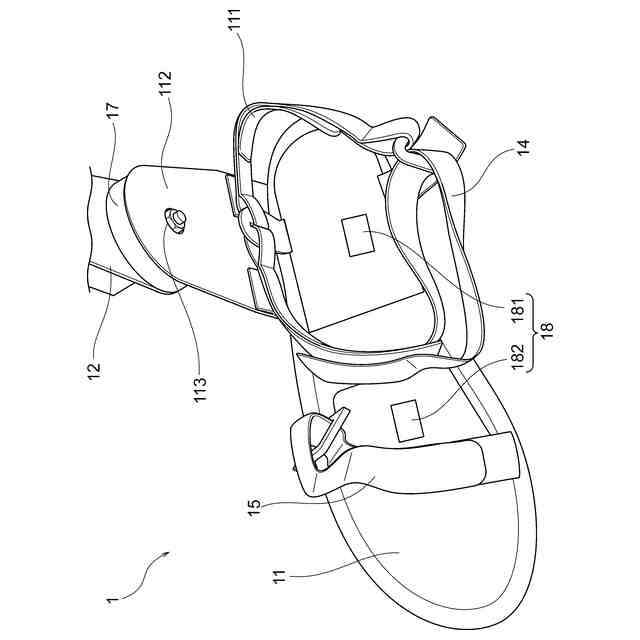
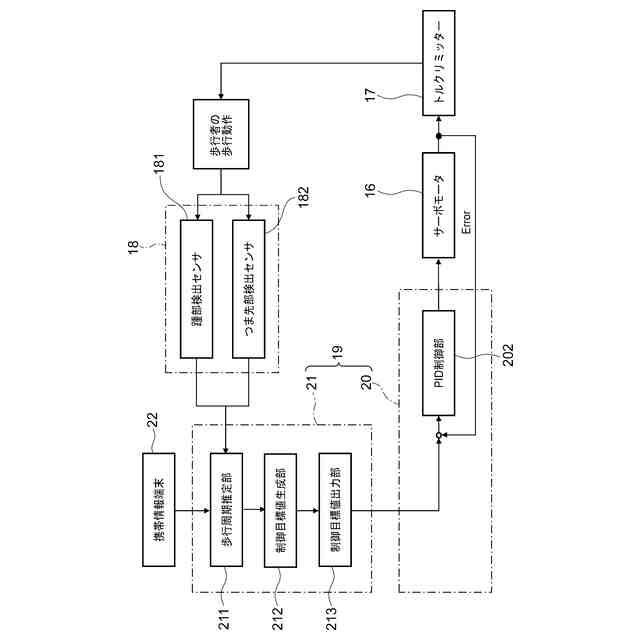
【解決手段】歩行者の脚部に装着され、歩行者の歩行動作を支援する歩行補助装置1は、歩行者の歩行動作に補助力を付与するアクチュエータ16と、歩行者の歩行動作を検出する歩行動作検出部18と、検出された歩行者の歩行動作に基づいて、歩行者の目標歩行周期を推定する歩行周期推定部211と、推定された目標歩行周期に基づいて、アクチュエータ16の制御目標値を生成する制御目標値生成部212と、生成された制御目標値に基づいて、アクチュエータ16の駆動を制御する駆動制御部20と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
歩行者の脚部に装着され、前記歩行者の歩行動作を支援する歩行補助装置であって、
前記歩行者の歩行動作に補助力を付与するアクチュエータと、
前記歩行者の歩行動作を検出する歩行動作検出部と、
前記歩行動作検出部により検出された前記歩行者の歩行動作に基づいて、前記歩行者の目標歩行周期を推定する歩行周期推定部と、
前記歩行周期推定部により推定された目標歩行周期に基づいて、前記アクチュエータの制御目標値を生成する制御目標値生成部と、
前記制御目標値生成部により生成された制御目標値に基づいて、前記アクチュエータの駆動を制御する駆動制御部と、を備える、
歩行補助装置。
続きを表示(約 1,500 文字)
【請求項2】
前記制御目標値生成部は、前記アクチュエータの動作が、前記歩行動作検出部により検出された前記歩行者の歩行動作に先行するように制御目標値を生成し、前記歩行者の歩行動作が制御目標値に達するまで待機する、
請求項1に記載の歩行補助装置。
【請求項3】
前記制御目標値生成部は、前記歩行周期推定部により推定された目標歩行周期を、前記歩行者の歩行動作に応じた複数のフェーズに分割し、それぞれのフェーズに応じて前記アクチュエータの制御目標値を生成する、
請求項2に記載の歩行補助装置。
【請求項4】
前記アクチュエータは、前記歩行者の脚部の関節位置に回動力を付与するサーボモータから構成され、
前記制御目標値生成部は、前記歩行周期推定部により推定された目標歩行周期に基づいて、目標歩行率を算出し、前記目標歩行率に応じた目標歩幅を算出し、予め計測された前記歩行者の歩幅と前記歩行者の脚部の関節位置の関節角度振幅値の関係に基づいて、前記アクチュエータの目標回動角度振幅値を制御目標値として算出する、
請求項3に記載の歩行補助装置。
【請求項5】
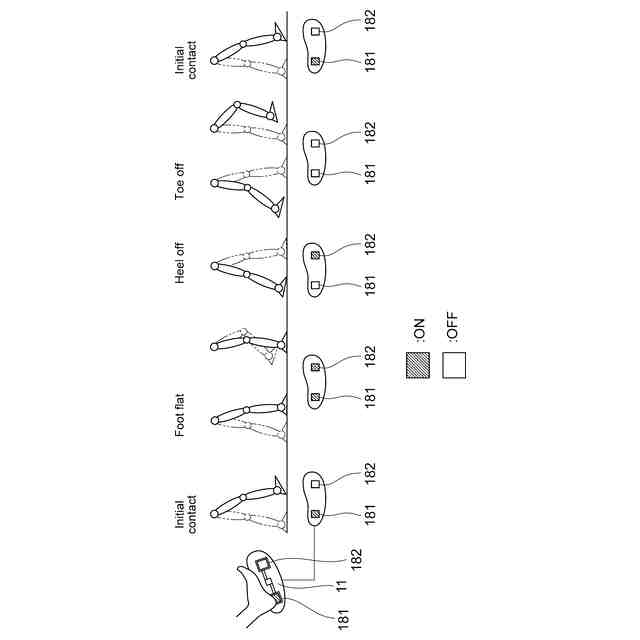
前記歩行周期推定部は、前記歩行動作検出部により検出された前記歩行者の踵部の接地から、前記歩行者のつま先部の接地までの時間に応じて目標歩行周期を推定する、
請求項1から4のいずれか1項に記載の歩行補助装置。
【請求項6】
前記歩行周期推定部は、前記歩行動作検出部により検出された複数回の歩行周期を平均して目標歩行周期を推定する、
請求項1から4のいずれか1項に記載の歩行補助装置。
【請求項7】
前記歩行周期推定部は、前記歩行動作検出部により検出された前記歩行者の歩数と、それぞれの歩数における複数の歩行周期との関係の線形近似を行うことにより、目標歩行周期を推定する、
請求項1から4のいずれか1項に記載の歩行補助装置。
【請求項8】
前記歩行周期推定部は、前記歩行動作検出部により検出された前記歩行者の歩数と、それぞれの歩数における複数の歩行周期との関係の曲線近似を行うことにより、目標歩行周期を推定する、
請求項1から4のいずれか1項に記載の歩行補助装置。
【請求項9】
前記歩行周期推定部は、前記歩行動作検出部により検出された前記歩行者の歩数と、それぞれの歩数における複数の歩行周期との関係の線形近似を行った第1の目標歩行周期と、曲線近似を行った第2の目標歩行周期とを比較して、直前に検出された歩行周期に近い歩行周期を選択して、前記目標歩行周期を推定する、
請求項1から4のいずれか1項に記載の歩行補助装置。
【請求項10】
歩行者の歩行動作に補助力を付与するアクチュエータと、
前記アクチュエータの駆動を制御する駆動制御部と、
前記歩行者の歩行動作を検出する歩行動作検出部と、を備え、前記歩行者の脚部に装着される歩行補助装置を制御する制御装置であって、
前記歩行動作検出部により検出された前記歩行者の歩行動作に基づいて、前記歩行者の目標歩行周期を推定する歩行周期推定部と、
前記歩行周期推定部により推定された目標歩行周期に基づいて、前記アクチュエータの制御目標値を生成する制御目標値生成部と、
前記制御目標値生成部により生成された制御目標値を前記駆動制御部に出力する制御目標値出力部と、を備える、
制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行補助装置、制御装置、及び制御プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、高齢者の人口増加に伴い、高齢者等の歩行訓練や運動促進を図り、脳卒中等を予防し、高齢者の健常な状態を維持することは重要である。しかし、高齢者等の歩行動作は、健常な成人に比較して歩幅が短くなり、足を上げた際につま先の高さが低くなるため、歩行障害を示す傾向がある。このため、従来、歩行者の歩行動作をアクチュエータにより補助する歩行補助装置が利用されている。歩行補助装置は、歩行者の歩行動作を検出し、その歩行動作に応じてアクチュエータを制御することにより、歩行者の歩行動作を補助している。
【0003】
例えば、特許文献1には、ロボティックスーツの各関節部における歩行者自身の力とスーツの補助力の相互作用力をトルクセンサにより検出し、歩行者とスーツの同調の度合いを調整した後、神経振動子モデルにより解析して、各関節部の目標角度を求め、各関節部における現在角度と目標角度との差に基づいて、アクチュエータをフィードバック制御する技術が開示されている。
【0004】
特許文献2には、歩行者に対して股関節、膝関節等の脚体関節回りのトルクを付与できる歩行補助装置において、歩行者が歩行リズムを変化させたときに、歩行補助リズムがこれに追随するように変化し、変化した歩行補助リズムに基づいて、トルクを付与するアクチュエータを制御する技術が開示されている。
【0005】
特許文献3には、底屈及び背屈方向に揺動可能な下腿部装着体に対して、踵部及びつま先部に設けられたセンサにより、踵部及びつま先部が接地状態にあるかを検出し、歩行者の歩行動作の1周期を3相以上のどの位相にあるかを判別し、判別された位相に応じて下腿部装着体の足裏載置部の踵部やつま先部に、ER流体や気体を用いて抗力を付与する技術が開示されている。
【0006】
特許文献1から特許文献3に開示された技術は、いずれも歩行者の歩行動作を検出し、歩行者の歩行動作に追従してアクチュエータの補助力により歩行動作を補助する技術であり、歩行補助装置が率先して動き、歩行動作を促進するものではない。高齢者等の歩行訓練や運動促進を図るには、歩行者に健常者の正しい歩行動作を促し、歩行者を正しい歩行動作に導く歩行補助装置が要望されている。このため、本発明者らは、非特許文献1及び非特許文献2に示すように、歩行者の歩行中の感情と筋疲労の状態に応じて歩行周期と歩幅の目標値を自動調整する歩行補助装置を検討してきた。
【先行技術文献】
【特許文献】
【0007】
特開2012-066375号公報
特開2004-073649号公報
特開2006-326185号公報
【非特許文献】
【0008】
Yunfan Li, et. al., Development of automatic controlled walking assistive device based on fatigue and emotion detection, JRM, Vol.34, No.6, pp.1383-1397,2022.
李雲帆・ゴン渝凱・田中 英一郎,歩行補助装置を自動制御するためのウエアブル感情疲労評価システム,MDT2021,1203,(2021).
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、非特許文献1及び非特許文献2に開示された歩行補助装置は、歩行者の感情や筋疲労の状態を検出し、検出結果により最適な目標歩行周期の推定を行っているため、目標歩行周期を推定するのに時間を要し、歩行者の歩行動作の変化に迅速に対応することができないという課題がある。
【0010】
本発明の目的は、歩行者の歩行動作の変化に迅速に対応して、目標歩行周期を推定することができる歩行補助装置、制御装置、及び制御プログラムを提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人早稲田大学
蛍光分析装置
1か月前
学校法人早稲田大学
熱界面接合部材及びその製造方法
5日前
学校法人早稲田大学
気象観測装置、気象観測方法及びプログラム
13日前
学校法人早稲田大学
カーボンナノチューブの製造装置および製造方法
4日前
学校法人早稲田大学
量子計算方法、量子計算システム、及びプログラム
2か月前
NTT株式会社
検索装置、検索方法及びプログラム
4日前
NTT株式会社
配送計画装置、配送計画方法、及びプログラム
1か月前
公立大学法人横浜市立大学
データ収集システムおよびプログラム
17日前
国立大学法人 熊本大学
パルス電流発生装置及びパルス電流発生方法
1か月前
国立大学法人東京科学大学
アニーリング処理装置、アニーリング処理方法及びプログラム
1か月前
学校法人早稲田大学
スルフィド結合含有重合体、その製造方法、スルフィド結合含有重合体組成物、及び光学材料
4日前
日産自動車株式会社
DC/DCコンバータの制御方法、及び、DC/DCコンバータの制御装置
1か月前
大学共同利用機関法人情報・システム研究機構
情報処理装置、情報処理方法、および、情報処理プログラム
1か月前
古河電気工業株式会社
熱電変換モジュールおよび熱電変換モジュールの製造方法
1か月前
学校法人早稲田大学
カーボンナノチューブの精製方法および精製装置、ならびに、これらによって製造されるカーボンナノチューブの集合体
7日前
個人
健康器具
7か月前
個人
鼾防止用具
6か月前
個人
短下肢装具
1か月前
個人
嚥下鍛錬装置
2か月前
個人
前腕誘導装置
1か月前
個人
白内障治療法
6か月前
個人
マッサージ機
7か月前
個人
導電香
7か月前
個人
脈波測定方法
7か月前
個人
脈波測定方法
6か月前
個人
洗井間専家。
5か月前
個人
ホバーアイロン
5か月前
個人
歯の修復用材料
2か月前
個人
アイマスク装置
19日前
個人
矯正椅子
3か月前
個人
バッグ式オムツ
3か月前
個人
胸骨圧迫補助具
10日前
個人
湿布連続貼り機。
28日前
個人
歯の保護用シール
3か月前
個人
車椅子持ち上げ器
6か月前
個人
口内洗浄具
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ