TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024148192
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023061079
出願日
2023-04-05
発明の名称
非接触給電システム、コンピュータプログラム、受電装置および送電装置
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
H02J
50/40 20160101AFI20241010BHJP(電力の発電,変換,配電)
要約
【課題】非接触給電システムにおいて、複数の受電装置による給電電力の合計が、送電回路の出力可能電力を上回ることを抑制する。
【解決手段】非接触給電システム1000、1000A、1000Bであって、系統電源PSから電力を供給されて、予め定められた動作周波数の高周波交流電力の供給を実行する送電回路110、110Aと、送電回路に対して互いに並列に接続され、非接触給電可能な複数の送電装置120、120A、120Bと、各送電装置による送電が実行可能である送電エリア内のいずれかに位置するときに、送電装置から非接触で給電を受ける複数の受電装置200と、複数の受電装置から要求される給電電力の合計が出力可能電力を上回らないように、各受電装置を制御する給電電力抑制部400と、を備え、各受電装置は、受電装置側情報を給電電力抑制部に対して送信し、給電電力抑制部は、受電装置側情報を利用して各受電装置を制御する。
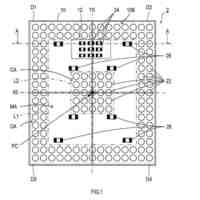
【選択図】図1
特許請求の範囲
【請求項1】
非接触給電システム(1000、1000A、1000B)であって、
系統電源(PS)から電力を供給されて、予め定められた動作周波数の高周波交流電力の供給を実行する送電回路(110、110A)と、
前記送電回路に対して互いに並列に接続され、非接触給電可能な複数の送電装置(120、120A、120B)と、
前記各送電装置による送電が実行可能である送電エリア内のいずれかに位置するときに、前記送電装置から非接触で給電を受ける複数の受電装置(200)と、
前記複数の受電装置から要求される給電電力の合計が、前記系統電源および前記送電回路が電力供給を継続可能な電力である出力可能電力を上回らないように、各前記受電装置を制御する給電電力抑制部(400)と、
を備え、
各前記受電装置は、前記受電装置の稼働状況を示す情報である受電装置側情報を前記給電電力抑制部に対して送信し、
前記給電電力抑制部は、前記受電装置側情報を利用して各前記受電装置を制御する、
非接触給電システム。
続きを表示(約 2,400 文字)
【請求項2】
請求項1に記載の非接触給電システムであって、
前記複数の送電装置はそれぞれ、1次側コイル(Ls)と1次側コンデンサ(C11、C12、C13)とを有する1次側共振回路(10、10A)を備え、
前記複数の受電装置はそれぞれ、
前記1次側コイルと磁気的に結合する2次側コイル(Lr)と2次側コンデンサ(Cr)とを有する2次側共振回路(240)と、
前記2次側共振回路から出力される交流電力を整流して直流電力に変換する受電回路(230)と、
前記受電回路を制御する受電側制御部(220)と、
前記直流電力が供給される負荷装置(210)と、
を備える、
非接触給電システム。
【請求項3】
請求項1に記載の非接触給電システムであって、
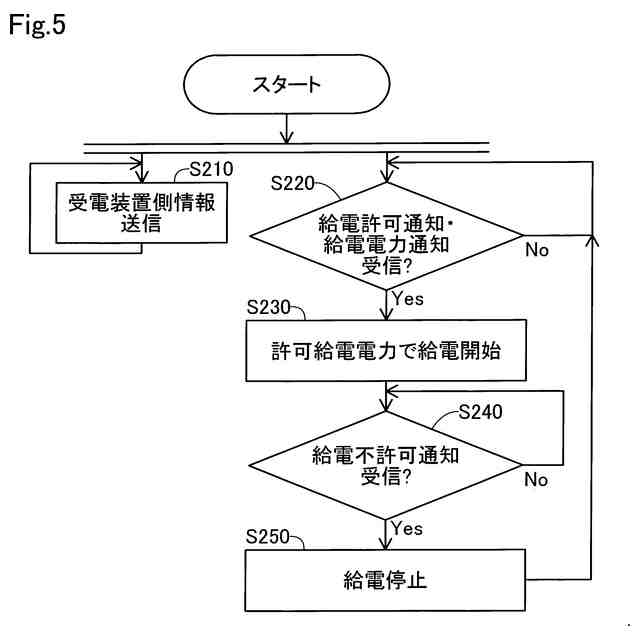
各前記受電装置は、バッテリ(210)を有し、前記受電装置側情報として、該受電装置の位置情報と、該受電装置が前記送電エリア内に位置するか否かを示す情報と、前記バッテリのSOCと、前記バッテリの残存電力量と、現在の給電電力と、現在の消費電力と、のうちの少なくともいずれかひとつを含む情報を前記給電電力抑制部に対して送信し、
前記給電電力抑制部は、前記受電装置側情報を利用して、前記複数の受電装置のうちの少なくとも一部の前記受電装置である通知対象受電装置の各々に対して、
給電を許可することを通知する給電許可通知、または、給電を許可しないことを通知する給電不許可通知を送信することと、
給電可能な電力である許可給電電力を通知する給電電力通知を送信することと、
のうちの少なくともいずれか一方を実行し、
前記通知対象受電装置は、
前記給電許可通知を受信したことを少なくとも含む予め定められた給電条件が満たされた場合には給電を開始または継続し、前記給電不許可通知を受信した場合には給電を待機または停止し、
前記給電電力通知を受信した場合には、通知された前記許可給電電力で給電を行う、
非接触給電システム。
【請求項4】
請求項3に記載の非接触給電システムであって、
前記給電条件は、前記受電装置ごとに予め定められた動作の実行中であるとの条件をさらに含む、
非接触給電システム。
【請求項5】
請求項3または請求項4に記載の非接触給電システムであって、
各前記受電装置は、前記受電装置側情報として、前記バッテリのSOCと、前記バッテリの残存電力量と、現在の消費電力と、のうちの少なくともいずれかひとつを含む情報を前記給電電力抑制部に送信し、
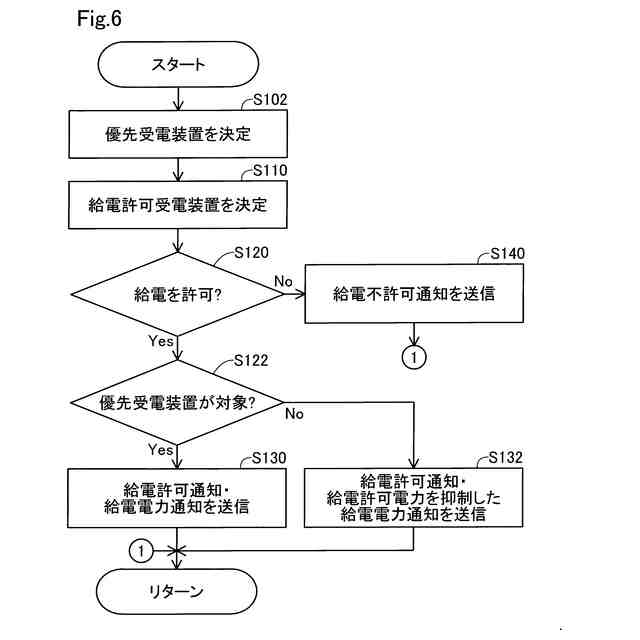
前記給電電力抑制部は、前記受電装置側情報を利用して、複数の前記通知対象受電装置のうち、優先的に給電を許可する前記通知対象受電装置である優先受電装置を決定し、前記優先受電装置に対して、前記給電許可通知を優先的に送信する、
非接触給電システム。
【請求項6】
請求項3または請求項4に記載の非接触給電システムであって、
各前記受電装置は、前記受電装置側情報として、前記バッテリのSOCと、前記バッテリの残存電力量と、現在の消費電力と、のうちの少なくともいずれかひとつを含む情報を前記給電電力抑制部に送信し、
前記給電電力抑制部は、前記受電装置側情報を利用して、複数の前記通知対象受電装置のうち、優先的に給電を許可する前記通知対象受電装置である優先受電装置を決定し、複数の前記通知対象受電装置のうち、前記優先受電装置ではない前記通知対象受電装置に対して、前記優先受電装置に対して通知される前記許可給電電力よりも抑制された前記許可給電電力を通知する前記給電電力通知を送信する、
非接触給電システム。
【請求項7】
請求項3または請求項4に記載の非接触給電システムであって、
各前記受電装置は、前記受電装置側情報として、前記バッテリのSOCを少なくとも含む情報を前記給電電力抑制部に送信し、
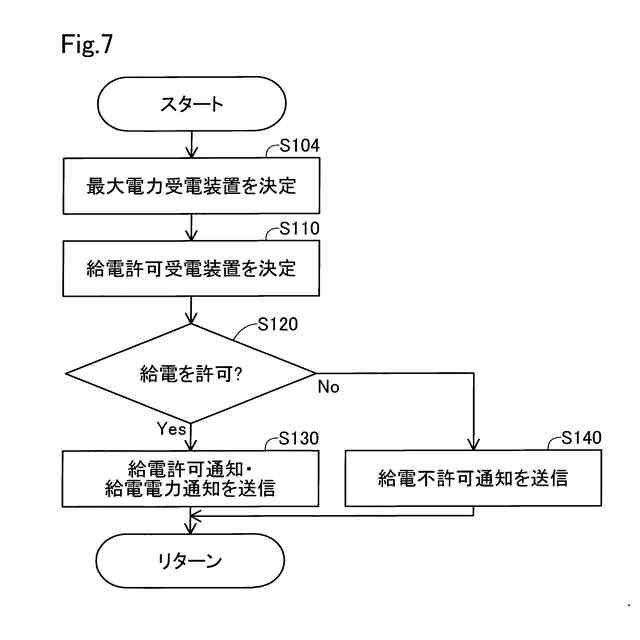
前記給電電力抑制部は、前記受電装置側情報を利用して、複数の前記通知対象受電装置のうち、前記送電装置の上限送電電力による給電を実行可能な前記通知対象受電装置である最大電力受電装置を決定し、前記最大電力受電装置のみに対して前記給電許可通知を通知する、
非接触給電システム。
【請求項8】
請求項3または請求項4に記載の非接触給電システムであって、
前記通知対象受電装置のうち、前記給電不許可通知を受信した前記通知対象受電装置は、給電を直ちに実行可能な状態である待機状態から、給電を直ちに開始しない非待機状態に移行する、
非接触給電システム。
【請求項9】
請求項3または請求項4に記載の非接触給電システムであって、
前記複数の受電装置のうちの少なくとも一部は、移動体(202)に搭載された前記受電装置である移動受電装置であり、
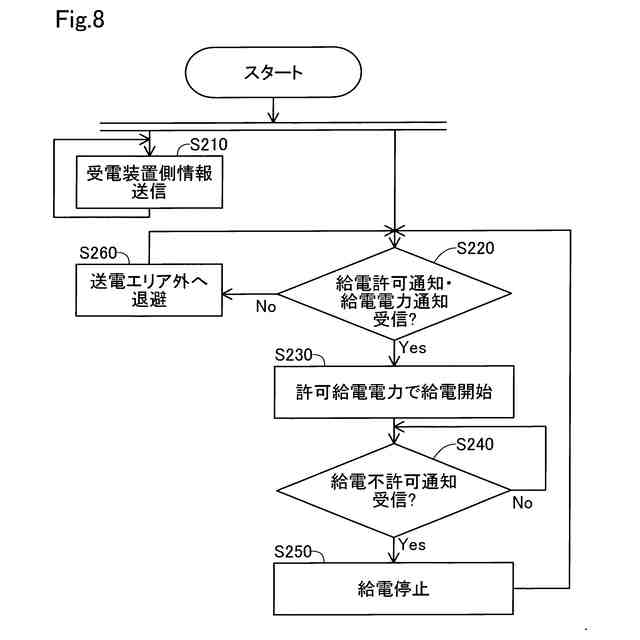
複数の前記通知対象受電装置のうち、前記移動受電装置である前記通知対象受電装置は、前記給電不許可通知を受信した場合には、前記送電エリアから退避する、
非接触給電システム。
【請求項10】
請求項3または請求項4に記載の非接触給電システムであって、
前記複数の受電装置は、前記送電エリアに固定して設置された固定設備に搭載された前記受電装置である固定受電装置と、移動体に搭載された前記受電装置である移動受電装置と、を含み、
前記給電電力抑制部は、前記移動受電装置が前記送電エリア内に位置する場合には、前記移動受電装置に対して、前記給電許可通知を優先的に送信する、
非接触給電システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、非接触給電システム、コンピュータプログラム、受電装置および送電装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
電動車両に給電を行う給電システムが知られている。このような給電システムにおいて複数の電動車両への給電を行う場合、電源装置の出力可能電力を給電電力が超過しないように給電を行う必要がある。特許文献1に記載の充電システムは、各電動車両の充電池の残量および移動先を取得して、各家庭に設置された充電装置における充電スケジュールを決定することにより、複数の充電装置において一斉に充電が行われて給電電力が過大となることを抑制している。
【先行技術文献】
【特許文献】
【0003】
特開2013-65265号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、AGV(Automatic Guided Vehicle)のように給電可能エリアを走行中に給電を行う電動車両や稼働中に給電を行う固定設備等を対象とする給電システムにおいては、受電装置が搭載された電動車両や固定設備の稼働状況によって給電のタイミングや給電量が大きく変動する。そのため、特許文献1に記載の充電システムのように充電装置の充電スケジュールを制御する方式では、電動車両や固定設備の稼働状況によっては十分に給電電力を抑制できない。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、非接触給電システム(1000、1000A、1000B)が提供される。非接触給電システムは、系統電源(PS)から電力を供給されて、予め定められた動作周波数の高周波交流電力の供給を実行する送電回路(110、110A)と、前記送電回路に対して互いに並列に接続され、非接触給電可能な複数の送電装置(120、120A、120B)と、前記各送電装置による送電が実行可能である送電エリア内のいずれかに位置するときに、前記送電装置から非接触で給電を受ける複数の受電装置(200)と、前記複数の受電装置から要求される給電電力の合計が、前記系統電源および前記送電回路が電力供給を継続可能な電力である出力可能電力を上回らないように、各前記受電装置を制御する給電電力抑制部(400)と、を備え、各前記受電装置は、前記受電装置の稼働状況を示す情報である受電装置側情報を前記給電電力抑制部に対して送信し、前記給電電力抑制部は、前記受電装置側情報を利用して各前記受電装置を制御する。
【0007】
この形態の制御装置によれば、受電装置側情報を利用して、複数の受電装置から要求される給電電力の合計が出力可能電力を上回らないように各受電装置を制御するので、各受電装置の稼働状況に応じて給電電力を調整できる。
【図面の簡単な説明】
【0008】
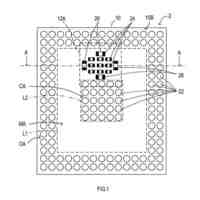
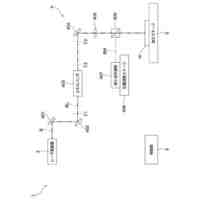
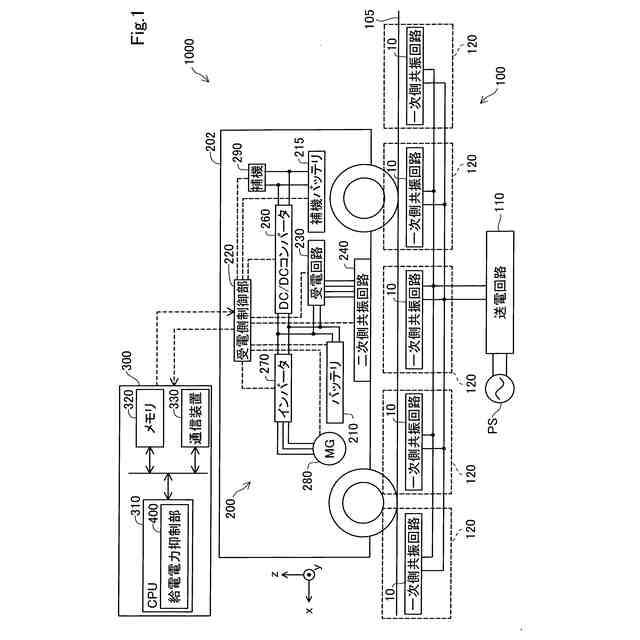
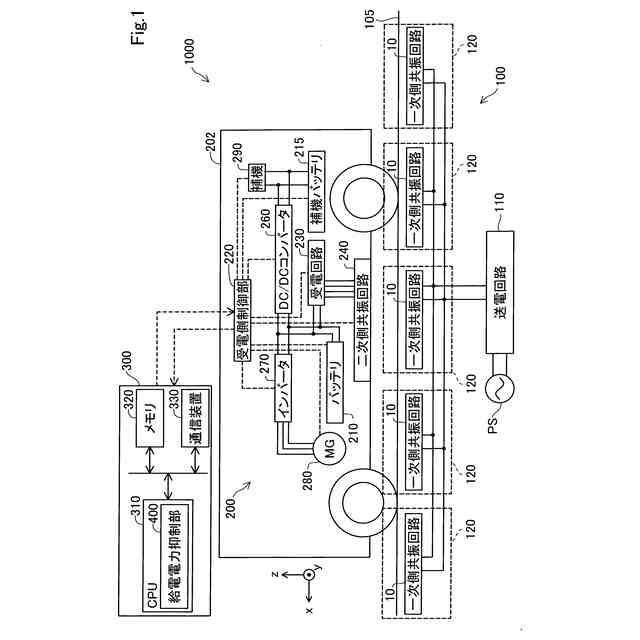
第1実施形態の非接触給電システムの概略構成を示す説明図である。
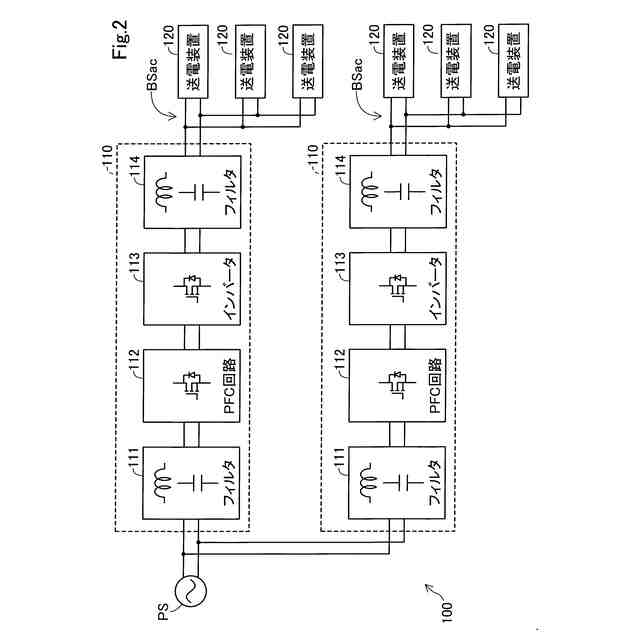
第1実施形態の送電回路の回路構成を示す説明図である。
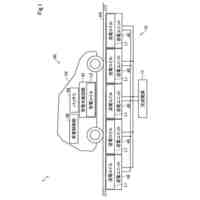
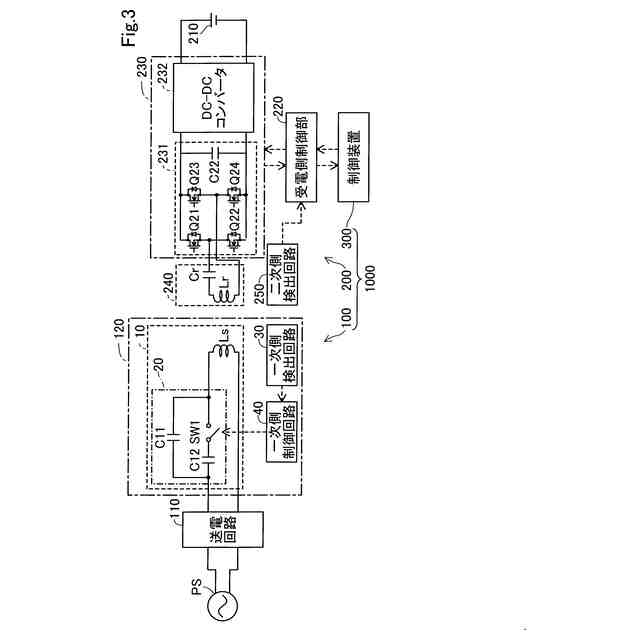
第1実施形態の非接触給電システムの回路構成を示す説明図である。
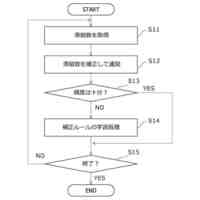
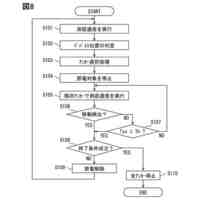
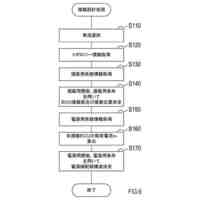
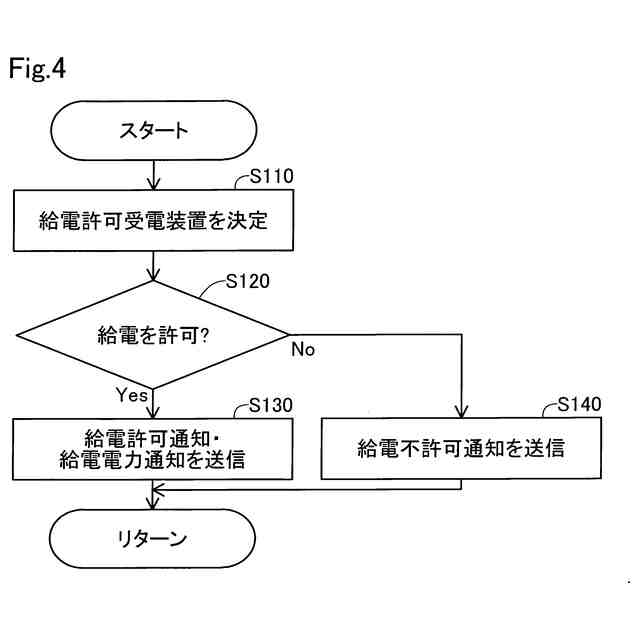
第1実施形態の給電電力抑制制御において給電電力抑制部が実行する制御の手順を示すフローチャートである。
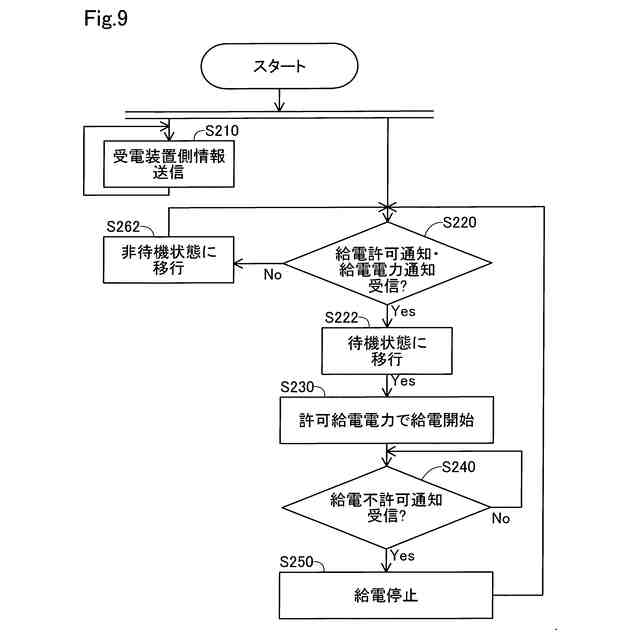
第1実施形態の給電電力抑制制御において受電装置が実行する制御の手順を示すフローチャートである。
第2実施形態の給電電力抑制制御において給電電力抑制部が実行する制御の手順を示すフローチャートである。
第4実施形態の給電電力抑制制御において給電電力抑制部が実行する制御の手順を示すフローチャートである。
第5実施形態の給電電力抑制制御において受電装置が実行する制御の手順を示すフローチャートである。
第6実施形態の給電電力抑制制御において受電装置が実行する制御の手順を示すフローチャートである。
他の実施形態の送電回路の回路構成を示す説明図である。
他の実施形態の非接触給電システムの回路構成を示す説明図である。
他の実施形態の非接触給電システムの回路構成を示す説明図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A-1.装置構成:
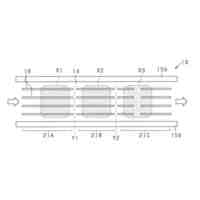
本実施形態の非接触給電システム1000は、工場や倉庫内において、AGV(Automatic Guided Vehicle)のような移動体または搬送用多関節ロボットやコンベアのような固定設備に搭載された受電装置200に対して、送電システム100から非接触で給電を行うシステムである。以下の説明において、移動体に搭載された受電装置200を「移動受電装置」、固定設備に搭載された受電装置200を「固定受電装置」と、必要に応じて区別して呼ぶ。図1に示すように、非接触給電システム1000は、送電システム100と、受電装置200と、制御装置300とを備える。本実施形態では、送電システム100は、床105の下に埋設されている。図1においては、移動受電装置として、床105上を走行する移動体としての電動車両202に搭載された受電装置200が示されている。図1において、x軸方向は電動車両202の進行方向を示し、y軸方向は電動車両202の幅方向を示し、z軸方向は鉛直上方向を示す。なお、固定受電装置としての受電装置200の構成は、移動受電装置としての受電装置200と同様であるので、図1において図示は省略されている。また、非接触給電システム1000は、複数の受電装置200を備えるが、それぞれ同様の構成であるので、図1において図示は省略されている。
【0010】
送電システム100は、送電回路110と、複数の送電装置120とを備える。送電回路110は、系統電源PSから交流電力を供給されて、予め定められた動作周波数の交流電力に変換する。送電回路110は、図2に示すように、系統電源PSに接続されている側から順に、ノイズフィルタ111と、PFC(Power Factor Correction)回路112と、インバータ113と、高周波フィルタ114とを備える。本実施形態では、系統電源PSに対して2つの送電回路110が互いに並列して接続されている。なお、送電回路110は、系統電源PSに対して1つのみ接続されていてもよく、3つ以上互いに並列に接続されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電子部品
3日前
株式会社デンソー
清掃装置
2日前
株式会社デンソー
電子装置
3日前
株式会社デンソー
トランス
4日前
株式会社デンソー
栽培装置
4日前
株式会社デンソー
熱輸送装置
9日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
点火コイル
3日前
株式会社デンソー
電気化学セル
4日前
株式会社デンソー
回路基板装置
3日前
株式会社デンソー
電子制御装置
3日前
株式会社デンソー
運行管理装置
3日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
電子制御装置
3日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
スパークプラグ
3日前
株式会社デンソー
非接触給電装置
3日前
株式会社デンソー
データ分配装置
2日前
株式会社デンソー
モータ制御装置
3日前
株式会社デンソー
パワーモジュール
3日前
株式会社デンソーテン
制御方法及び制御装置
2日前
株式会社デンソー
半導体回路の製造方法
3日前
株式会社デンソー
水素ガスバリア被覆体
2日前
株式会社デンソー
マルチチップモジュール
3日前
株式会社デンソー
レーザ加工装置の調整方法
4日前
株式会社デンソー
位置判定装置、位置判定方法
3日前
株式会社デンソー
電動ポンプ、及びダイヤフラム
4日前
株式会社デンソー
半導体装置およびその製造方法
4日前
株式会社デンソー
電力変換システム、プログラム
4日前
株式会社デンソー
搭載設計装置及び搭載設計方法
3日前
株式会社デンソーテン
情報処理方法および情報処理装置
10日前
株式会社SOKEN
電力変換器
3日前
株式会社デンソーテン
情報処理方法および情報処理装置
10日前
株式会社デンソー
光アンテナおよび光アンテナアレイ
2日前
株式会社SOKEN
形状推定装置
3日前
株式会社デンソー
リアクトル部品および電力変換装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ