TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146187
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058937
出願日
2023-03-31
発明の名称
作業車両
出願人
株式会社日立建機ティエラ
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/24 20060101AFI20241004BHJP(水工;基礎;土砂の移送)
要約
【課題】車体の物体への接近を知らせる警報の作動を最低限に抑えて、オペレータを操作に集中させることが可能な作業車両を提供する。
【解決手段】車体の側部に前後方向に間隔を空けて設けられ、車幅方向で車体の周囲に位置する物体Xを検出する複数の物体距離センサ31L~33Lと、複数の物体距離センサ31L~33Lにより所定の監視範囲内に物体Xが検出された場合に警報する報知装置4と、複数の物体距離センサ31L~33Lでそれぞれ検出された検出情報に基づいて警報信号を報知装置4に対して出力するコントローラ6と、を備えたホイールローダ1において、コントローラ6は、前側物体距離センサ31Lおよび後側物体距離センサ33Lのうち一方のみにより物体Xが検出された場合には警報信号を出力し、前側物体距離センサ31Lおよび後側物体距離センサ33Lの両方により物体Xが検出された場合には警報信号を出力しない。
【選択図】図7
特許請求の範囲
【請求項1】
車輪が設けられた車体と、
前記車体の前部に取り付けられた作業装置と、
前記車体の側部に前後方向に所定の間隔を空けて設けられ、前記車体の車幅方向で前記車体の周囲に位置する物体を検出する複数の物体検出装置と、
前記複数の物体検出装置により所定の監視範囲内に物体が検出された場合に警報する報知装置と、
前記複数の物体検出装置にてそれぞれ検出された検出情報に基づいて、警報するための警報信号を前記報知装置に対して出力するコントローラと、
を備えた作業車両において、
前記複数の物体検出装置は、
前記車体の前部に配置された第1物体検出装置と、
前記車体の後部に配置された第2物体検出装置と、を含み、
前記コントローラは、
前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出された場合には、前記報知装置に対して前記警報信号を出力し、
前記第1物体検出装置および前記第2物体検出装置の両方により物体が検出された場合には、前記報知装置に対して前記警報信号を出力しない
ことを特徴とする作業車両。
続きを表示(約 2,400 文字)
【請求項2】
請求項1に記載の作業車両において、
前記車体の前後の進行方向を切り替える前後進切替装置をさらに備え、
前記警報信号は、
前記車体の周囲に物体が存在することを報知する警報を発令する低レベル警報信号と、
前記低レベル警報信号に係る警報のレベルよりも高いレベルの警報を発令する高レベル警報信号と、を含み、
前記コントローラは、
前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出され、かつ、前記前後進切替装置において前記車体の進行方向が前進に切り替わっている場合には、前記報知装置に対して前記低レベル警報信号を出力し、
前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出され、かつ、前記前後進切替装置において前記車体の進行方向が後進に切り替わっている場合には、前記報知装置に対して前記高レベル警報信号を出力する
ことを特徴とする作業車両。
【請求項3】
請求項1に記載の作業車両において、
前記車体の走行速度を調整するための車速調整装置をさらに備え、
前記コントローラは、
前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出された場合には、前記報知装置に対して前記警報信号を出力すると共に、前記車体の最高走行速度を制限する車速制限信号を前記車速調整装置に対して出力し、
前記第1物体検出装置および前記第2物体検出装置の両方により物体が検出された場合には、前記報知装置に対して前記警報信号を出力しない一方で、前記車速制限信号を前記車速調整装置に対して出力する
ことを特徴とする作業車両。
【請求項4】
請求項2に記載の作業車両において、
前記車体の走行速度を調整するための車速調整装置をさらに備え、
前記コントローラは、
前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出され、かつ、前記前後進切替装置において前記車体の進行方向が後進に切り替わっている場合には、前記報知装置に対して前記高レベル警報信号を出力すると共に、ブレーキを作動させて前記車体を停止させ、その後、前記車体の最高走行速度を制限する車速制限信号を前記車速調整装置に対して出力する
ことを特徴とする作業車両。
【請求項5】
請求項1に記載の作業車両において、
前記車輪を操舵するステアリングシリンダと、
前記ステアリングシリンダに供給される作動油の流れを制御するステアリング制御弁と、
前記車体の走行速度を検出する車速検出装置と、
前記車体の操舵角度を検出する操舵角度検出装置と、をさらに備え、
前記コントローラは、
前記第2物体検出装置により物体が検出され、前記第1物体検出装置により物体が検出されず、前記車速検出装置で検出された前記車体の走行速度が所定の車速閾値よりも低く、かつ、前記操舵角度検出装置で検出された操舵角度に基づいて、前記車体の左右いずれかの方向への操舵を判定した場合には、前記報知装置に対して前記警報信号を出力すると共に、操舵方向への操舵を制限する操舵制限信号を前記ステアリング制御弁に対して出力する
ことを特徴とする作業車両。
【請求項6】
請求項2に記載の作業車両において、
前記車体の走行速度を調整するための車速調整装置と、
前記車体の操舵角度を検出する操舵角度検出装置と、をさらに備え、
前記コントローラは、
前記操舵角度検出装置で検出された操舵角度と、前記作業装置の姿勢と、に基づいて、前記作業装置の先端が描く軌跡線と前記車体との距離を算出し、
前記前後進切替装置において前記車体の進行方向が後進に切り替わっており、かつ、前記第1物体検出装置により検出された物体との検出距離が算出された距離よりも短い場合には、前記高レベル警報信号を前記報知装置に対して出力すると共に、ブレーキを作動させて前記車体を停止させ、前記車体の最高走行速度を制限する車速制限信号を前記車速調整装置に対して出力する
ことを特徴とする作業車両。
【請求項7】
請求項1に記載の作業車両において、
前記車体の前後の進行方向を切り替える前後進切替装置と、
前記車体に設けられて前記車体の前方に位置する物体を検出する第3物体検出装置と、
前記作業装置の姿勢を検出する姿勢検出装置と、をさらに備え、
前記作業装置は、前記車体に対して上下方向に回動可能に構成され、
前記コントローラは、
前記姿勢検出装置で検出された前記作業装置の姿勢に基づいて、前記作業装置が上げ状態である場合には前記第3物体検出装置を無効にし、前記作業装置が下げ状態である場合には前記第3物体検出装置を有効にし、
前記前後進切替装置において前記車体の進行方向が前進に切り替わっており、かつ、前記第3物体検出装置が有効であって、前記第3物体検出装置により物体が検出された場合には、前記警報信号を前記報知装置に対して出力する
ことを特徴とする作業車両。
【請求項8】
請求項1に記載の作業車両において、
前記車体は、
前記車体の前部となる前フレームと、
前記車体の後部となる後フレームと、を有し、
前記前フレームと前記後フレームとが、センタジョイントによって車幅方向に回動自在に連結され、
前記第1物体検出装置は、
前記前フレームの側部に取り付けられ、
前記第2物体検出装置は、
前記後フレームの後端部に取り付けられている
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業装置を備えた作業車両に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来から、ホイールローダなどの作業車両においては、車体に設けられた監視センサで障害物や人を検知して、オペレータに注意を促す周囲監視システムが搭載されたものが知られている。
【0003】
例えば、特許文献1には、作業車両の周辺の物体を検出する物体検出装置の検出データに基づいて、作業車両に設けられた警報装置に作動指示を出力する作動指示出力部と、作業車両の運転室に設けられたキャンセル操作装置から出力された無効指示に基づいて、作動指示を無効にする無効化部と、運転室における搭乗者の特定の搭乗状態を検出する搭乗状態検出装置の検出データに基づいて、無効にされた作動指示を有効にする有効化部と、を備えた作業車両の周囲監視システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第6909730号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された周囲監視システムでは、例えば、屋内作業のように周囲が壁で囲まれており、オペレータが作業車両の障害物への接近を認識していて警報が不要な場合には、物体検出装置で障害物が検出される度に警報が作動すると煩わしいため、その都度オペレータがキャンセル装置を操作しなければならない。そのため、オペレータは、運転や作業装置の操作に集中することができない。
【0006】
そこで、本発明の目的は、車体の物体への接近を知らせる警報の作動を最低限に抑えて、オペレータを操作に集中させることが可能な作業車両を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明は、車輪が設けられた車体と、前記車体の前部に取り付けられた作業装置と、前記車体の側部に前後方向に所定の間隔を空けて設けられ、前記車体の車幅方向で前記車体の周囲に位置する物体を検出する複数の物体検出装置と、前記複数の物体検出装置により所定の監視範囲内に物体が検出された場合に警報する報知装置と、前記複数の物体検出装置にてそれぞれ検出された検出情報に基づいて、警報するための警報信号を前記報知装置に対して出力するコントローラと、を備えた作業車両において、前記複数の物体検出装置は、前記車体の前部に配置された第1物体検出装置と、前記車体の後部に配置された第2物体検出装置と、を含み、前記コントローラは、前記第1物体検出装置および前記第2物体検出装置のうち一方のみにより物体が検出された場合には、前記報知装置に対して前記警報信号を出力し、前記第1物体検出装置および前記第2物体検出装置の両方により物体が検出された場合には、前記報知装置に対して前記警報信号を出力しないことを特徴とする。
【発明の効果】
【0008】
本発明によれば、車体の物体への接近を知らせる警報の作動を最低限に抑えて、オペレータを操作に集中させることができる。上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
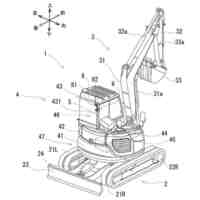
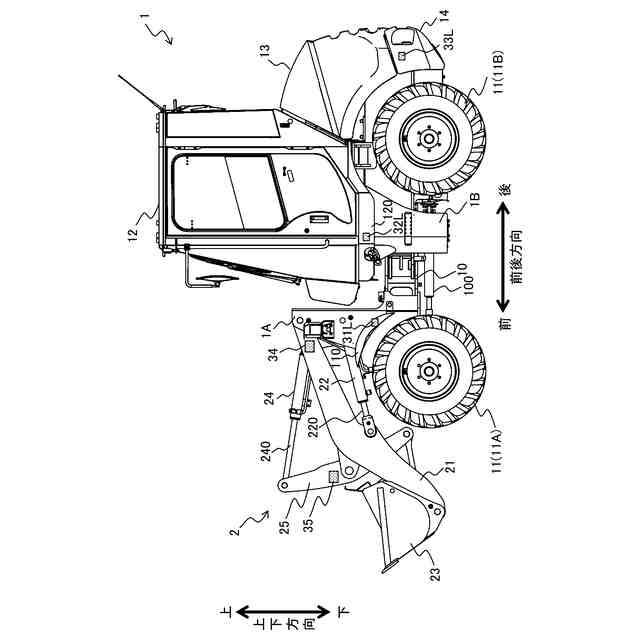
第1実施形態に係るホイールローダの一構成例を示す外観側面図である。
図1に示すホイールローダを上方から見た図である。
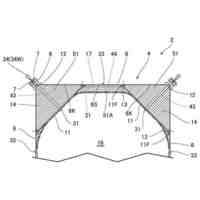
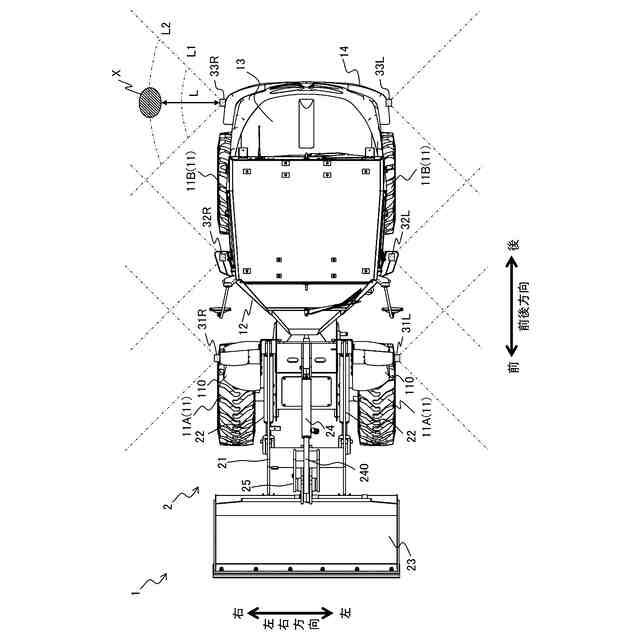
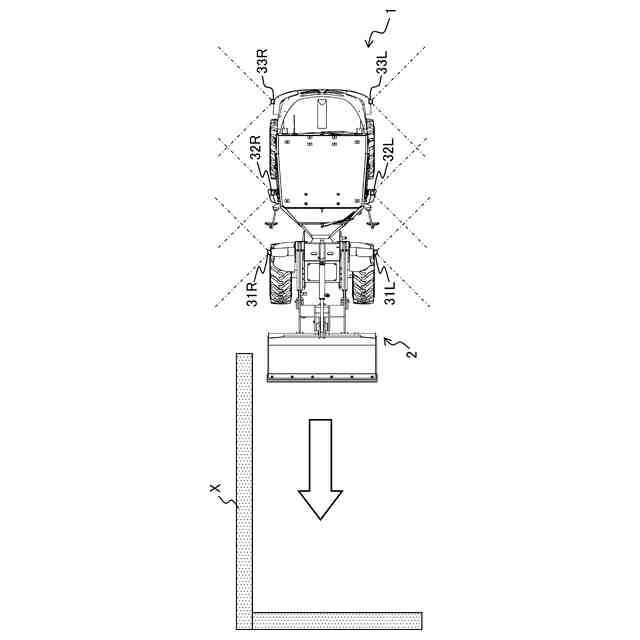
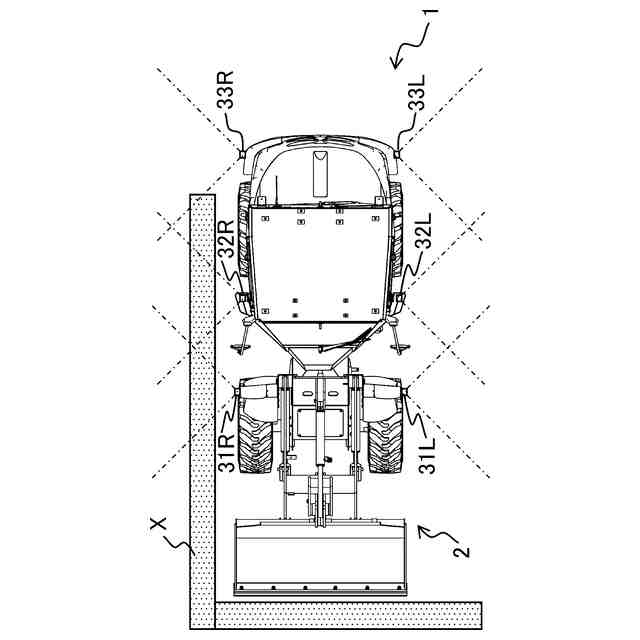
図1に示すホイールローダを前方から見た図である。
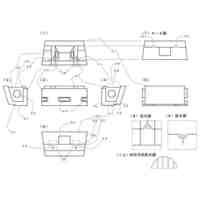
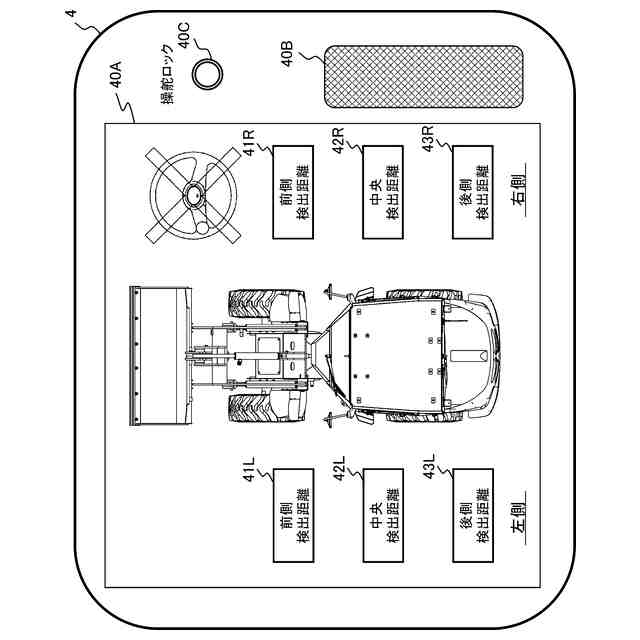
報知装置の一構成例を示す図である。
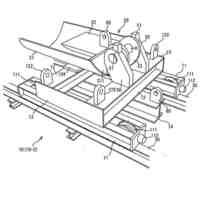
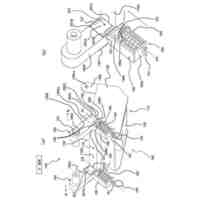
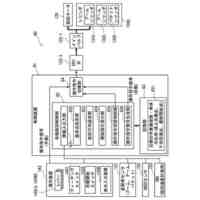
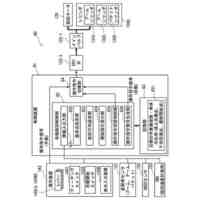
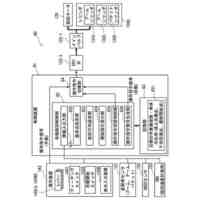
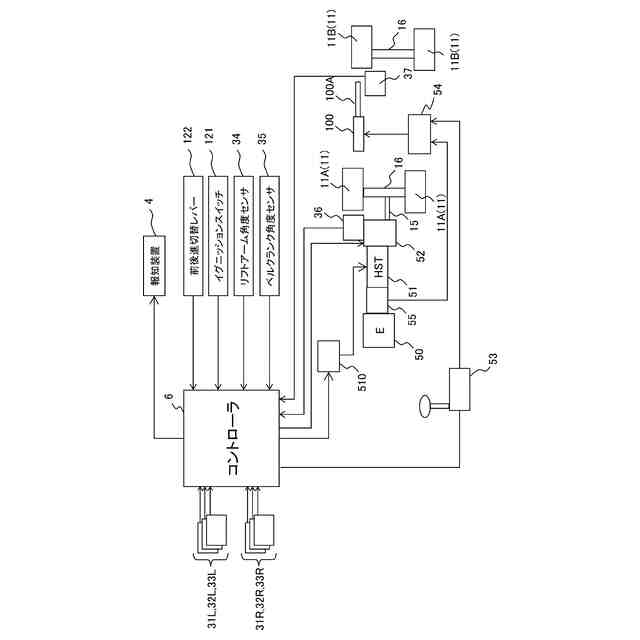
ホイールローダの走行駆動システムの一構成例を示すシステム構成図である。
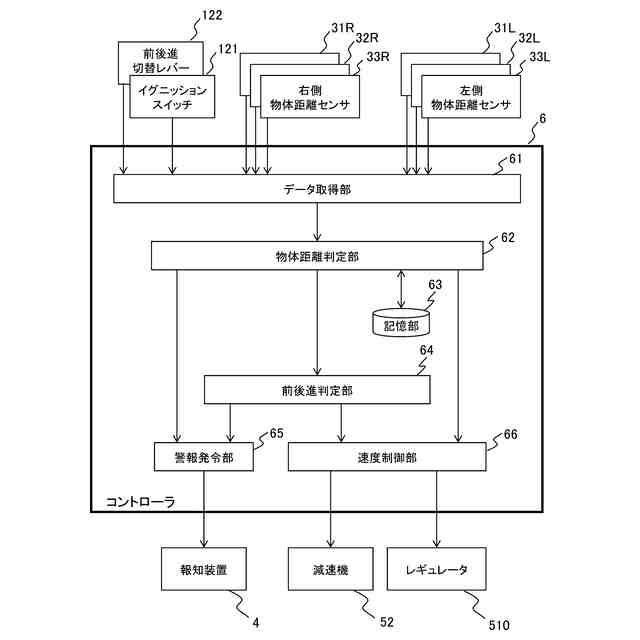
コントローラが有する機能を示す機能ブロック図である。
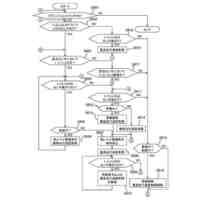
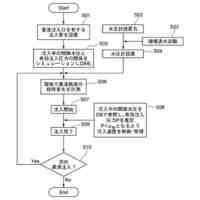
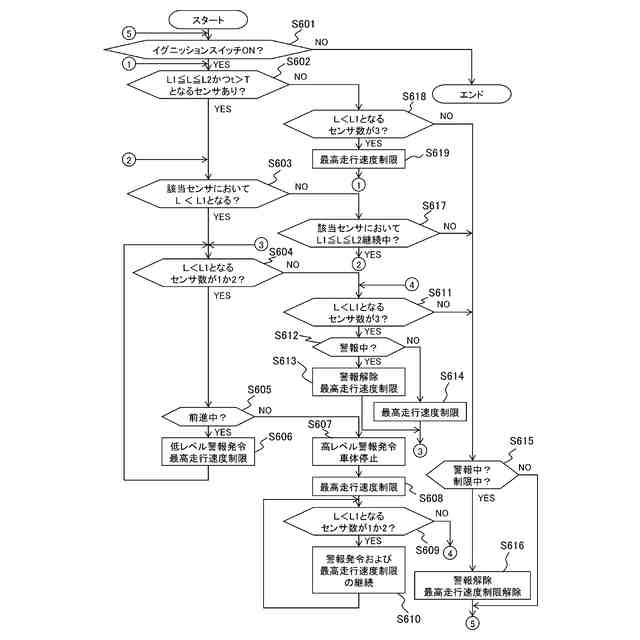
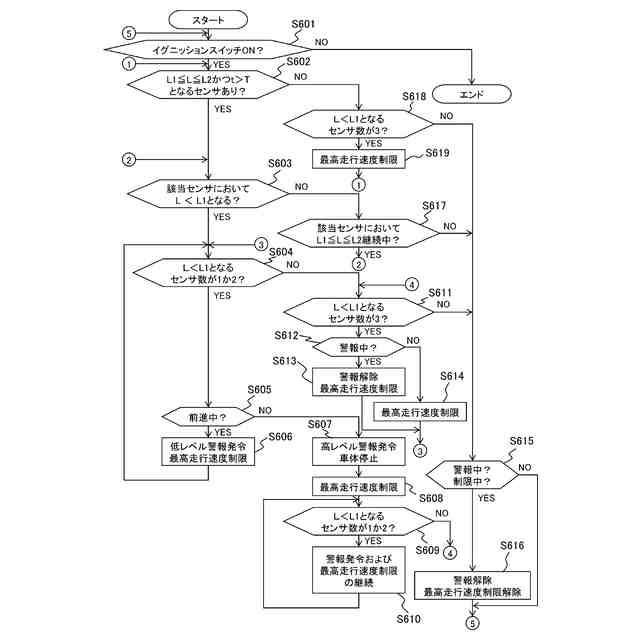
コントローラで実行される処理の流れを示すフローチャートである。
ホイールローダが物体の横を通過する状況について説明する図であって、ホイールローダが物体に接近する前の状態を示す。
ホイールローダが物体の横を通過する状況について説明する図であって、ホイールローダが物体に接近している状態を示す。
ホイールローダが物体に接近してその横を通過する状況について説明する図である。
ホイールローダが物体の付近で右折する状況について説明する図であって、ホイールローダが右折する前の状態を示す。
ホイールローダが物体の付近で右折する状況について説明する図であって、ホイールローダが右折した後の状態を示す。
第2実施形態に係るコントローラが有する機能を示す機能ブロック図である。
第2実施形態に係るコントローラで実行される処理の流れを示すフローチャートである。
ホイールローダが左方向に操舵しながら後進している状態を上から見た図である。
第3実施形態に係るコントローラが有する機能を示す機能ブロック図である。
第3実施形態に係るコントローラで実行される処理の流れを示すフローチャートである。
第4実施形態に係るホイールローダを上方から見た図である。
図16に示すホイールローダの側面図であって、リフトアームが最下位置まで下がっている状態を示す。
図16に示すホイールローダの側面図であって、リフトアームが最上位置まで上がっている状態を示す。
上側物体距離センサの送波範囲について説明する図である。
上側物体距離センサに対する前方距離閾値の設定内容について示す表である。
第4実施形態に係るコントローラが有する機能を示す機能ブロック図である。
第4実施形態に係るコントローラで実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の各実施形態に係る作業車両の一態様として、主に屋内作業で用いられることが多い小型のホイールローダ(コンパクトホイールローダ)を例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本ソリッド株式会社
防舷材の保護方法
今日
株式会社西原鉄工所
コンクリートブロック
2日前
株式会社テノックス
共回り監視装置
2日前
株式会社テノックス
深層混合処理工法
2日前
鹿島建設株式会社
運搬機構および管体の搬送方法
今日
C技研株式会社
切削装置
2日前
日立建機株式会社
建設機械の油圧制御システム
2日前
株式会社日立建機ティエラ
作業車両
2日前
日鉄建材株式会社
補強壁部材および壁構造体
6日前
株式会社日立建機ティエラ
建設機械
2日前
株式会社小松製作所
制御装置、制御方法および作業機械
2日前
株式会社小松製作所
制御装置、制御方法および作業機械
2日前
株式会社小松製作所
制御装置、制御方法および作業機械
2日前
株式会社小松製作所
制御装置、制御方法および作業機械
2日前
前田工繊株式会社
多連式布団篭用網材、多連式布団篭及びその施工方法
1日前
ヤンマーパワーテクノロジー株式会社
作業車両
6日前
株式会社ライテク
土嚢とその製造方法並びに土嚢構造体とその施工方法
2日前
五洋建設株式会社
浸透固化処理工法の注入管理方法、注入管理システム、これらを用いた地盤改良工法およびコンピュータプログラム
2日前
他の特許を見る

 特許ウォッチ
特許ウォッチ