TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024143245
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055814
出願日
2023-03-30
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
KDDI株式会社
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
主分類
B66B
1/14 20060101AFI20241003BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】通信環境が不安定なエレベータにおいてロボット2に不測の不具合が生じることを抑制する。
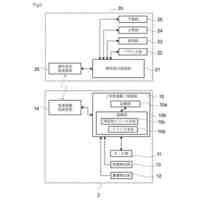
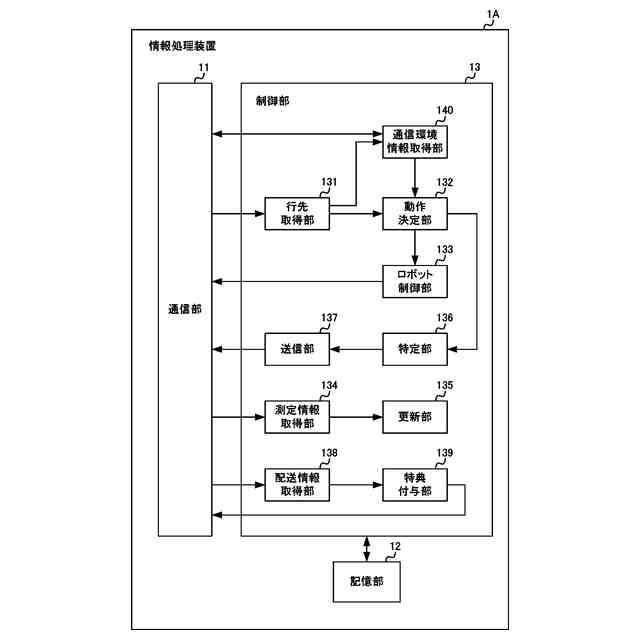
【解決手段】ネットワークを介して制御される、エレベータに乗車可能な自律走行するロボット2の行先を取得する行先取得部131と、エレベータにおける通信可否を示す通信環境情報に基づいて、ロボット2の行先に対応するエレベータへの乗車有無を含むロボット2の動作を決定する動作決定部132と、動作決定部132により決定された動作に基づいてロボットを制御するロボット制御部133と、を有する情報処理装置1である。
【選択図】図2
特許請求の範囲
【請求項1】
ネットワークを介して制御される、エレベータに乗車可能な自律走行するロボットの行先を取得する行先取得部と、
エレベータにおける通信可否を示す通信環境情報に基づいて、前記ロボットの行先に対応するエレベータへの乗車有無を含む前記ロボットの動作を決定する動作決定部と、
前記動作決定部により決定された動作に基づいて前記ロボットを制御するロボット制御部と、
を有する情報処理装置。
続きを表示(約 1,600 文字)
【請求項2】
前記動作決定部は、前記通信環境情報が示す前記ロボットの行先に対応する前記エレベータにおける通信可否に基づいて、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できるか否かを判定し、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できると判定する場合、前記ロボットの行先に対応するエレベータに乗車するよう前記ロボットの動作を決定する、
請求項1に記載の情報処理装置。
【請求項3】
前記動作決定部は、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できないと判定する場合、前記ロボットが所定の位置に移動するよう前記ロボットの動作を決定する、
請求項2に記載の情報処理装置。
【請求項4】
エレベータにおける行先と、前記行先に対応するエレベータにおける通信可否と、を関連付けた前記通信環境情報を記憶する記憶部をさらに有し、
前記動作決定部は、前記記憶部が記憶する前記通信環境情報に基づいてエレベータへの乗車有無を含む前記ロボットの動作を決定する、
請求項1から3のいずれか1項に記載の情報処理装置。
【請求項5】
前記ロボットが乗車したエレベータを示すエレベータ識別情報と、該ロボットが測定した該エレベータにおける通信可否を示す情報と、を関連付けた測定情報を取得する測定情報取得部と、
取得した前記測定情報に基づいて、記憶部が記憶する前記通信環境情報を更新する更新部と、をさらに有する、
請求項4に記載の情報処理装置。
【請求項6】
前記動作決定部は、前記ロボットの行先に対応するエレベータが、前記行先取得部が取得した前記ロボットの行先にのみ停止可能か否かにさらに基づいて、エレベータへの乗車有無を含む前記ロボットの動作を決定する、
請求項1から3のいずれか1項に記載の情報処理装置。
【請求項7】
前記動作決定部は、前記通信環境情報に基づいて、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できないと判定する場合、エレベータを制御する制御装置に前記ロボットの行先に対応するエレベータをロボット専用にすることができるか否かを問い合わせ、前記エレベータをロボット専用にすることができる場合に、前記ロボットの行先に対応するエレベータに乗車するよう前記ロボットの動作を決定する、
請求項2又は3に記載の情報処理装置。
【請求項8】
前記ロボットが前記ロボットの行先に対応するエレベータに乗車できないと前記動作決定部が判定する場合、前記ロボットが配送する荷物の荷受人又は荷送人を特定する特定部と、
前記特定部が特定した荷受人又は荷送人に所定のメッセージを送信する送信部と、
をさらに有する、請求項2から3のいずれか1項に記載の情報処理装置。
【請求項9】
前記特定部は、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できないと前記動作決定部が判定する場合、前記ロボットが待機する位置である待機位置をさらに特定し、
前記送信部は、前記特定部が特定した荷受人又は荷送人に、前記特定部が特定した前記ロボットの待機位置を含む所定のメッセージを送信する、
請求項8に記載の情報処理装置。
【請求項10】
前記ロボットから前記荷物の配送が完了したことを示す配送完了通知であって、前記荷物の受領者を示す受領者識別情報を含む前記配送完了通知を取得する配送情報取得部と、
前記配送情報取得部が前記配送完了通知を取得した場合、前記配送完了通知に含まれる受領者識別情報が示す受領者に所定の特典を付与する特典付与部と、
をさらに有する、請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
自律走行するロボットをエレベータに乗降させるようロボットに代わってエレベータの戸を制御する技術が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022―19590号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、エレベータ内の通信環境が不安定な場合に、ネットワークを介して制御されるロボットをエレベータに乗車させると、ロボットに不測の不具合が生じうる。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、通信環境が不安定なエレベータにおいてロボットに不測の不具合が生じることを抑制することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様の情報処理装置においては、ネットワークを介して制御される、エレベータに乗車可能な自律走行するロボットの行先を取得する行先取得部と、エレベータにおける通信可否を示す通信環境情報に基づいて、前記ロボットの行先に対応するエレベータへの乗車有無を含む前記ロボットの動作を決定する動作決定部と、前記動作決定部により決定された動作に基づいて前記ロボットを制御するロボット制御部と、を有する。
【0007】
前記動作決定部は、前記通信環境情報が示す前記ロボットの行先に対応する前記エレベータにおける通信可否に基づいて、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できるか否かを判定し、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できると判定する場合、前記ロボットの行先に対応するエレベータに乗車するよう前記ロボットの動作を決定してもよい。
【0008】
前記動作決定部は、前記ロボットが前記ロボットの行先に対応するエレベータに乗車できないと判定する場合、前記ロボットが所定の位置に移動するよう前記ロボットの動作を決定してもよい。
【0009】
エレベータにおける行先と、前記行先に対応するエレベータにおける通信可否と、を関連付けた前記通信環境情報を記憶する記憶部をさらに有し、前記動作決定部は、前記記憶部が記憶する前記通信環境情報に基づいてエレベータへの乗車有無を含む前記ロボットの動作を決定してもよい。
【0010】
前記ロボットが乗車したエレベータを示すエレベータ識別情報と、該ロボットが測定した該エレベータにおける通信可否を示す情報と、を関連付けた測定情報を取得する測定情報取得部と、取得した前記測定情報に基づいて、記憶部が記憶する前記通信環境情報を更新する更新部と、をさらに有してもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
建築部材の吊り上げ装置
10日前
白山工業株式会社
腕重量補償機構
15日前
株式会社タダノ
高所作業車
15日前
ナブテスコ株式会社
台車
10日前
株式会社 タイコー
重量物吊下用治具
21日前
大和ハウス工業株式会社
挟持装置
9日前
フジテック株式会社
エレベータシステム
14日前
若築建設株式会社
吊り装置及び吊り方法
25日前
親和パッケージ株式会社
トング装置
15日前
株式会社日立製作所
エレベーター装置
16日前
フジテック株式会社
エレベータシステム
14日前
フジテック株式会社
エレベータシステム
14日前
大洋製器工業株式会社
足場用吊りチェーン
10日前
株式会社関電工
電柱用物品昇降装置
21日前
ユニパルス株式会社
荷役助力装置及び荷役助力装置の制御方法
8日前
株式会社アクティオ
遠隔操作式フック
9日前
株式会社日立製作所
乗客コンベア
7日前
株式会社日立ビルシステム
エレベータシステム
7日前
株式会社豊田自動織機
荷置き制御システム
1日前
フジテック株式会社
エレベーター
15日前
フジテック株式会社
エレベータ
9日前
株式会社メイキコウ
電動リフト装置
25日前
フジテック株式会社
エレベーター
15日前
三菱重工業株式会社
重量推定システム
7日前
株式会社島津製作所
作業管理システム
22日前
フジテック株式会社
エレベータシステム
15日前
株式会社シェルタージャパン
リフトアップ式シェルター扉
16日前
中西金属工業株式会社
フォークリフト
10日前
株式会社日立製作所
ブレーキ解放レバー
14日前
株式会社キトー
巻上機システムおよび巻上機の制御方法
15日前
三菱重工業株式会社
重心位置推定システム
7日前
フジテック株式会社
エレベータの制御システム
21日前
フジテック株式会社
エレベータの制御システム
25日前
フジテック株式会社
エレベータの制御システム
10日前
フジテック株式会社
エレベータの制御システム
10日前
フジテック株式会社
エレベータの制御システム
8日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ